
FWP加工变形补偿预测的ATS-FNN建模及仿真*
2012-07-31 07:42邓耀华刘桂雄
华南理工大学学报(自然科学版) 2012年3期
邓耀华 刘桂雄
(华南理工大学机械与汽车工程学院,广东广州510640)
柔性工件轨迹(FWP)加工是指在由多层柔软物组合成的工件上进行各种复杂图形加工,在表面上浮现出凹凸不平立体图案的过程[1].FWP加工过程变形由多个因素造成,加工过程通过调节多个相关变量来减少加工误差,FWP变形补偿控制实质上是一个多输入多输出(MIMO)过程,目前这类加工过程智能建模主要是基于模糊推理、基于神经网络的建模方法.T-S模糊模型[2]是目前最具代表性的MIMO模糊建模模型之一,通过模糊推理实现全局的非线性;文献[3]中提出的模糊动态模型由多个线性方程通过模糊隶属度函数光滑地连接成全局模型,可以任意精度逼近定义在紧集上的任意连续非线性函数;文献[4]中提出了一种新型模糊双曲正切模型,设计的最优控制器可以使整个系统性能达到最优.文献[5]中基于小波和Elman神经网络建立多因素影响下活塞环制造关键工序的质量预测模型.文献[6]中提出了用于球面铣削加工过程的3维切削力预测的神经网络模型.
由文献分析可知,模糊神经网络建模方法具有很强的非线性表达能力,非常适合动态复杂不确定性加工过程的建模.由于FWP加工过程变形不仅受到图元夹角、插补速度、加工方向角、柔性件夹紧方式等因素的影响,而且实际FWP加工过程还具有时变性、对变形补偿预测模型具有较高实时性要求等问题.采用单一的模糊神经网络建模方法难以构建FWP这个既复杂、实时性要求又比较高的场合预测模型.为此,文中将T-S模糊推理[7]、模糊神经网络(FNN)建模方法相结合,引入模糊聚类方法ASFCM[8]来实现T-S型模糊神经网络(TS-FNN)的前件网络结构辨识的FWP加工变形补偿预测的自适应TS模糊神经网络(ATS-FNN)建模方法.
1 FWP加工变形补偿预测建模原理
FNN具有学习能力强、逼近非线性函数映射能力好的特点,T-S推理模型(前件为语言变量、后件为输入变量的线性组合)不需要去模糊化计算,显然FNN与T-S推理模型相结合将有助于降低FNN建模与计算的复杂度,但标准T-S型模糊神经网络对输入空间的划分为线性划分,使输入空间难以优化,规则提取困难,系统结构必须事先加以指定,对于复杂非线性空间,要获得较好的辨识效果,会使规则数目成倍增加,造成模型训练效率低.为此,文中引入模糊聚类方法ASFCM进行TS-FNN模型前件网络的提取,自适应调整输入空间聚类中心、半径及聚类数,完成输入空间模糊等级划分,确定数据点隶属度函数与规则适应度,以提高模型的训练速度与逼近精度.文中提出基于ASFCM与TS-FNN的FWP加工变形补偿预测的建模框架如图1所示,它集中了ASFCM、T-S推理模型和模糊神经网络建模方法的优点.
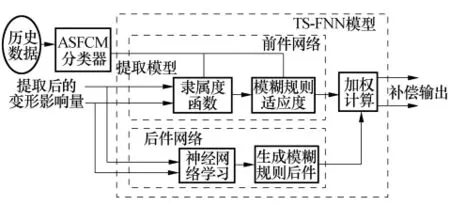
图1 FWP加工变形补偿预测框架Fig.1 Compensation prediction framework of process deformation for FWP
考虑到标准TS-FNN模型的后件网络结构比较简单,文中在标准后件网络中添加一层隐含层,以提高全局逼近能力.图2为对标准TS-FNN模型进行扩展后的TS-FNN模型结构图.
图 2 中 x1,x2,…,xn为变形影响量;s1,s2,…,sr(1≤r≤p) 为补偿输出量;wr,1、wr,2为后件网络第 r个子网络(网络的第1~3层节点数分别为l1、l2、m)的两个连接权值矩阵,其元素分别为wi'b和wbz,即第1层节点i'到第2层节点b的权值、第2层节点b到第 3 层节点 z的权值,1≤i'≤l1,1≤b≤l2,1≤z≤m,yrz为第3层节点z的输出;μcN为第c个输入量的第N个模糊划分等级的隶属度函数值,am为模糊规则的适应度,为am的归一化结果.
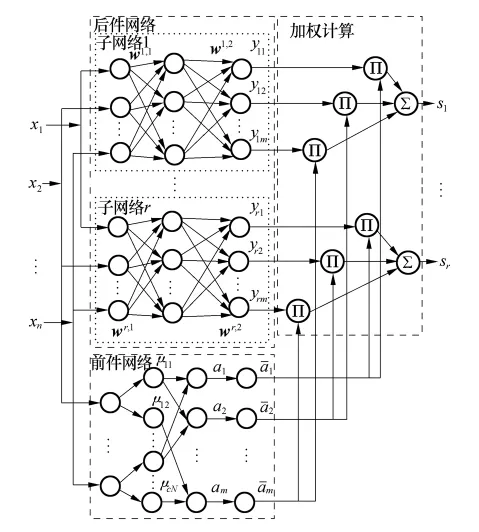
图2 扩展后的TS-FNN模型结构Fig.2 Structure of TS-FNN model after extension
2 FWP加工变形补偿预测建模实现
2.1 FWP输入数据的ASFCM划分
对FWP输入数据进行ASFCM划分就是对输入数据(加工变形影响量)进行模糊等级划分,找出各类别的中心位置坐标,划分区域宽度,导入TS-FNN前端用于提取输入量隶属度函数及模糊规则适应度.采用ASFCM对输入数据进行模糊划分主要是求解模糊划分矩阵、聚类中心.ASFCM距离测度用马氏距离表示,通过求c个模糊聚类划分的最小化目标函数[9]

得到n维数据空间中数据点xk的类别中心和模糊划分矩阵.式中:X={x1,x2,…,xn},为 n 维输入数据集;U= [uik]c×N,为X的模糊划分矩阵,uik为第k个样本关于第i类的隶属度为第i类的聚类中心(i=1,2,…,c),聚类中心集合 V={v1,v2,…,vc};β为聚类模糊程度加权指数,β∈[1,∞);为数据点x到聚类中心vk距离的平方内积范
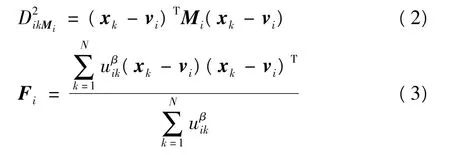
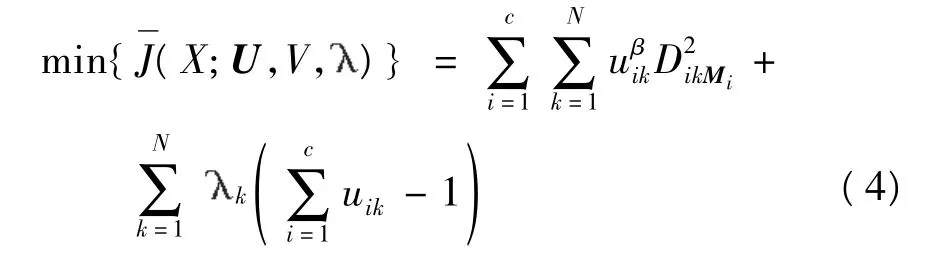
i数,即为正定对称矩阵,通过协方差(式(3))实现对Mi的调整,挖掘存在相关性的数据集有效信息(Fi大表明数据相关性大),使样本集相互正交,从而识别数据集上不同拓扑模式类.式(1)最小化目标函数是输入数据模糊聚类的依据,同时有那么式(1)可用拉格朗日(Lagrange)乘数法综合目标函数、约束条件,引入Lagrange乘子构成新目标函数:
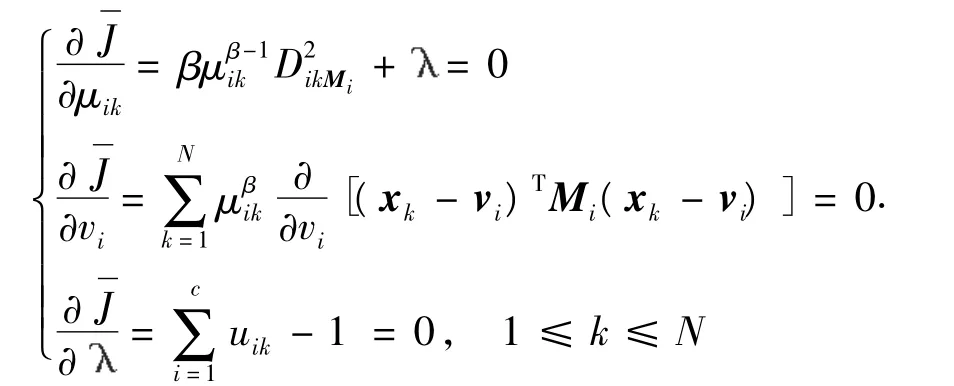
解得
因此,在数据集X、聚类类别数c和模糊加权幂指数β已知的情况下,式(5)是完成数据划分求得最优模糊分类矩阵、聚类中心的计算公式.
2.2 FWP加工变形补偿的TS-FNN构建
如图2所示的TS-FNN模型结构图,FWP加工变形补偿的TS-FNN构建包括构造前件网络的隶属度函数、规则适应度与计算后件网络的权值参数.
2.2.1 构造前件网络隶属度函数、模糊规则适应度
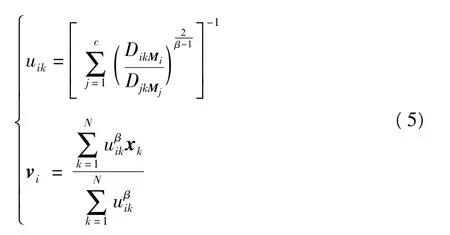
设经ASFCM划分后输入数据模糊划分矩阵为U,第i组模糊类别为Gi(1≤i≤c),则Gi的类别中心 viq、方差 σ2iq为
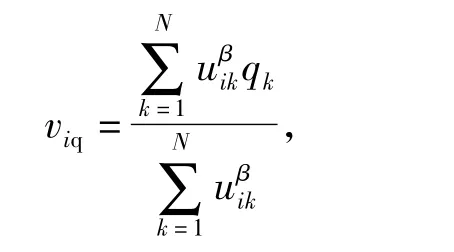
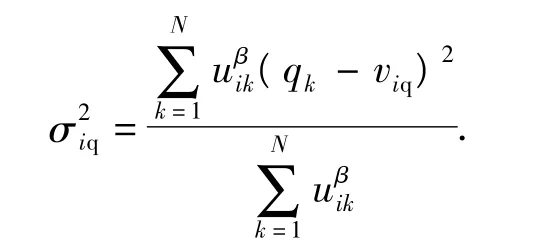
若输入数据空间划分要求较高的模糊聚类,每一类Gi中类别数据qk与其聚类中心 vi=(vi1,vi2,…,vin)T的某个类别分量非常接近(方差 σ2iq≈0[9]),则可取与类别中心viq距离最短的类别数据qk作为模糊类Gi的决策函数dF(Gi),即

相应xk对Gi的隶属度函数μ(xk)按式(7)计算.

隶属度函数μji(xkj)用于衡量输入样本xk与模糊类Gi原型之间的相似关系:若xk远离原型,则μji(xkj)接近0;若 xk靠近原型,则 μji(xkj)接近1[10].
对于每一个模糊类别Gi及其决策类别,Ri表示某一决策规则

若将多维模糊集合Gi投影到整个输入数据空间上,则决策规则R'i表示为

xk对规则 R'i的适应度 αi为各分量隶属度μji(xkj)(j=1,2,…,n)的乘积,即

式(7)、(8)就是构造TS-FNN的隶属度函数、规则适应度的计算公式.
σ2iq反映模糊划分质量越大,划分质量越差,故可引入η作为质量指标参数.计算模糊聚类数目为c时所有模糊划分类别的方差,若≤η,表明模糊聚类可用于TS-FNN前件网络的提取;否则c=c+1,重新进行模糊划分.
2.2.2 计算后件网络权值参数
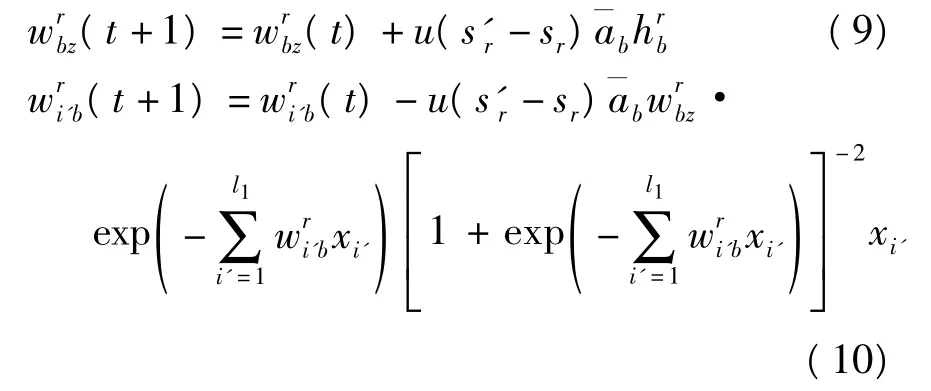
文中基于最速下降法的后件神经网络学习算法[11],通过误差反传迭代运算计算权值矩阵 wr,1和wr,2.图2中后件子网络r的第1层直接将输入传送到第2层,若节点 b的激活函数为 fb(x),则第2层节点 b的输入为输 出 为若第3层节点传递函数为Sigmoid函数,则第3层节点z的输出为输出 sr=设s'r)T,分别为后件神经网络的实际输出、期望输出,那么作为误差代价函数的网络输出最小均方差为

根据误差反传算法计算wrbz、wrib:
3 测试实验
以FWP加工实测数据样本为例,对加工变形补偿预测的ATS-FNN模型进行性能分析.在个人计算机(Intel酷睿双核处理器,频率为2.2 GHz,内存为2GB,硬盘为160GB,Microsoft Windows XP Professional操作系统,Matlab R2008a仿真软件)上进行分析计算.
3.1 FWP加工变形补偿预测网络模型的构建
图元夹角x1、进给深度x2、插补速度x3、柔性件装夹方式x4(用“1”表示集中夹紧,“2”表示分布夹紧)是影响加工轨迹变形的因素,故将它们作为TSFNN的输入,X、Y方向上的进给补偿量(s1、s2)作为TS-FNN的输出,构造前件网络隶属度函数、模糊规则适应度,计算后件网络的权值参数 w1,1、w1,2、w2,1、w2,2.
选择5种厚度不同、长×宽为150mm×100mm、材料为聚氨酯海绵(弹性模量为0.2561MPa,泊松系数为0.25)的柔性件,以图3所示的自制FWP加工实验平台进行轨迹加工实验,轨迹夹角加工误差控制在±1.5%内,获得 240 组样本(材料厚度为 6、10、15、20、30mm;加工轨迹为平行四边形,其锐角分别为15°、30°、45°、60°)作为 ATS-FNN 模型的试验数据.
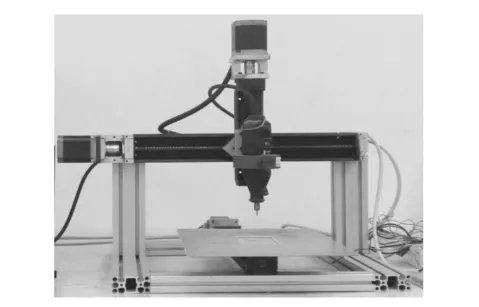
图3 FWP加工实验平台Fig.3 Experimental platform of FWP process
取模糊划分参数 β=2、ε=10-6、最大迭代数tmax=400,c=2、η =1.25.采用 ASFCM 对数据进行模糊划分,当 c=10时,所有模糊划分类别方差≤η,模糊划分结束.经模糊划分后,得到10个类别中心vi(i=1,2…,10)及相应数据划分区域宽度然后根据式(8),取 γ =2,计算输入x1~x4的隶属度函数、模糊规则适应度.
氟比洛芬酯联合氢吗啡酮用于骨科术后静脉自控镇痛的镇痛、镇静效果及安全性 ………………………… 曹雪峰等(20):2832
进一步可确定前件网络第1~4层节点数分别为 4、40、10、10.由 Hecht-Nielsen 方法[12]确定 TSFNN后件网络的两个子网络第2层节点数为11、第3层节点数为10.最后确定后件网络各层神经元节点数为 5、11、10.
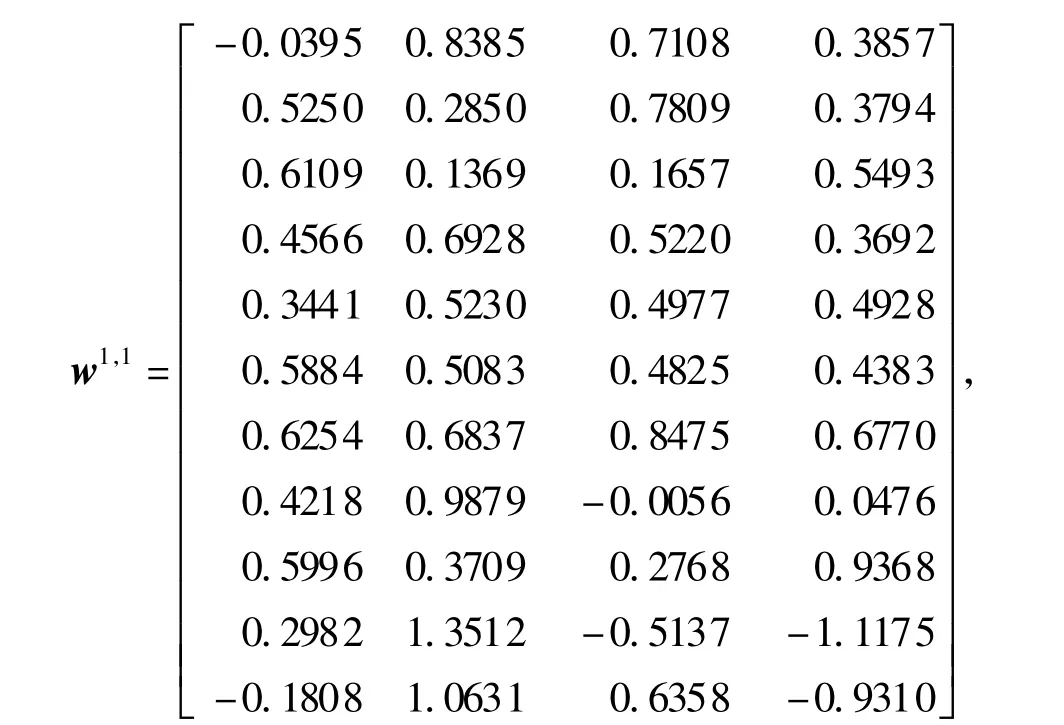
从240组样本中选择208组样本用于训练TSFNN后件网络,另外32组样本用于准确度检验.学习效率初始值 δ=0.55,并按 Δδ=0.05逐步减少,最小期望误差emin=0.005,训练步数Steptrain=500,求得后件网络的权值参数w1,1为进一步可计算 w1,2、w2,1、w2,2的值.
3.2 预测网络模型的性能分析
建模速度与预测准确度是评价预测网络模型性能的重要指标.将文中模型与标准T-S型模糊神经网络预测模型STS-FNN(前件网络各层节点数分别为 4、24、48、48,后件网络各层节点数分别为 5、5、2,误差反传EBPA学习算法[12])的性能进行了比较.
从240组样本中选择其中208组样本用于训练STS-FNN、ATS-FNN 模型,重复测试 11 次所得 STSFNN、ATS-FNN 模 型 的 平 均 建 模 时 间 tMSTS-FNN、tMATS-FNN分别为 113.79 和 54.23 s,ATS-FNN 的建模时间比 STS-FNN 减少了 52.34%,ATS-FNN 模型因采用了ASFCM方法而提高了建模速度.
使用剩余的32组检验样本来检验STS-FNN、ATS-FNN 模型的预测准确度,图 4 为 STS-FNN、ATS-FNN 模型的预测偏差 Δs1、Δs2对比.
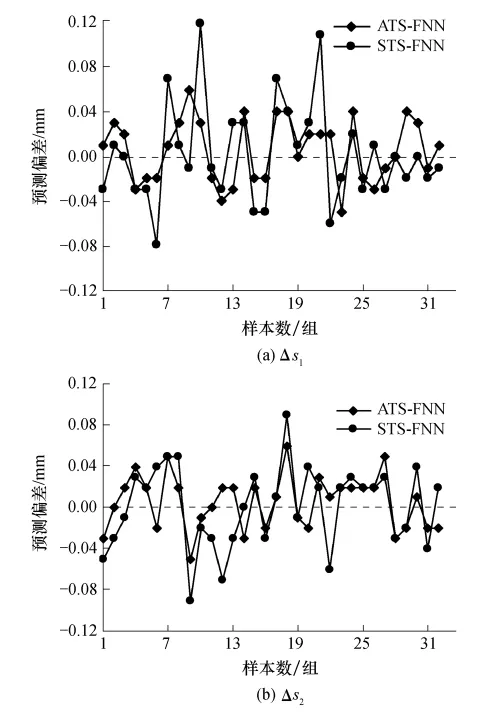
图4 两种模型的预测偏差对比Fig.4 Comparison of prediction errors of two models
4 结语
在ATS-FNN建模过程中,首先采用ASFCM方法优化输入空间,确定前件网络的隶属度函数,精简前件网络模糊规则数,有助于节省计算过程模糊推理时间,提高模型训练速度,测试结果表明ATS-FNN的建模时间比STS-FNN的建模时间减少了52.34%.
与STS-FNN模型相比,ATS-FNN模型的后件网络增加了隐含层,在同样训练步数下,ATS-FNN后件网络的权值迭代计算次数会增加,但因采用误差反传算法,故得到更逼近实际的权值,从而提高后续计算的精度.
FWP加工变形补偿预测的ATS-FNN建模方法集中了ASFCM方法、模糊神经网络TS-FNN建模方法的优点,而且TS-FNN前后件网络相对独立,容易进行嵌入式并行计算,因而有利于ATS-FNN模型在实际FWP加工补偿预测中的应用.
[1] Deng Yaohua,Liu Guixiong,Liao Qiaofu.Research of FWP process deformation compensation forecasting on the basis of TS-FNN [J].Advanced Materials Research,2011,295/296/297:2430-2437.
[2] 孙增圻,徐红兵.基于T-S模型的模糊神经网络[J].清华大学学报:自然科学版,1997,37(3):76-80.Sun Zeng-qi,Xu Hong-bin.Fuzzy-neural network based on T-S model[J].Journal of Tsinghua University:Sci &Tech,1997,37(3):76-80.
[3] Feng G,Cao S G,Rees N W.Stable adaptive control of fuzzy dynamic systems [J].Fuzzy Sets and Systems,2002,131(2):217-224.
[4] 张化光,王智良,黎明.广义模糊双曲正切模型:一个万能逼近器 [J].自动化学报,2004,30(3):416-422.Zhang Hua-guang,Wang Zhi-liang,Li Ming.Generalized fuzzy hyperbolic model:a universal approximator[J].Acta Automatica Sinica,2004,30(3):416-422.
[5] 杨杰,刘桂雄.基于小波Elman神经网络的活塞环渗氮质量预测控制[J].华南理工大学学报:自然科学版,2009,37(2):45-48.Yang Jie,Liu Gui-xiong.Quality prediction and control of piston rings nitriding based on wavelet transform and Elman neural network[J].Journal of South China University of Technology:Natural Science Edition,2009,37(2):45-48.
[6] Zuperl U,Cus F,Reibenschuh M.Neural control strategy of constant cutting force system in end milling [J].Robotics and Computer Integrated Manufacturing,2011,27(3):485-493.
[7] 朱学峰,周文彬,陈华艳.二级倒立摆的TS型逐级模糊神经网络控制[J].华南理工大学学报:自然科学版,2005,33(2):43-47.Zhu Xue-feng,Zhou Wen-bin,Chen Hua-yan.Control of the double-link inverted pendulum by using Takagi-Sugeno model based on gradual fuzzy neural network[J].Journal of South China University of Technology:Natural Science Edition,2005,33(2):43-47.
[8] de Carvalho Francisco de A T,Tenório Camilo P.Fuzzy K-means clustering algorithms for inteval-valued data based on adaptive quadratic distaces[J].Fuzzy Sets and Systems,2010,161(23):2978-2999.
[9] Egrioglu E,Aladag C H.Fuzzy time series forecasting method based on Gustafson-Kessel fuzzy clustering [J].Expert Systems with Applications,2011,38(8):10355-10357.
[10] 张东波,王耀南,黄辉先.基于模糊粗糙模型的粗神网络建模方法研究[J].自动化学报,2008,34(8):1016-1023.Zhang Dong-bo,Wang Yao-nan,Huang Hui-xian.Fuzzyrough model based rough neural network modeling[J].Acta Automatica Sinica,2008,34(8):1016-1023.
[11] Kang Yuan,Chang Chuan-wei,Huang Yuanruey,et al.Modification of a neural network utilizing hybrid filters for the compensation ofthermal deformation in machine tools[J].International Journal of Machine Tools &Manufacture,2007,47(2):376-387.
[12] Wong W K,Zeng X H,Au W M R.A decision support tool for apparel coordination through integrating the knowledge-based attribute evaluation expert system and the T-S fuzzy neural network [J].Expert Systems with Applications,2009,36(2):2377-2390.
猜你喜欢
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
电子制作(2019年19期)2019-11-23
铁道通信信号(2019年6期)2019-10-08
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
雷达学报(2017年6期)2017-03-26
重型机械(2016年1期)2016-03-01
大连工业大学学报(2015年4期)2015-12-11
海军航空大学学报(2015年4期)2015-02-27
电子设计工程(2015年6期)2015-02-27
