插电式串联混合动力汽车的系统匹配与仿真*
2013-09-03 10:06吴晓刚卢兰光
汽车工程 2013年7期
吴晓刚,卢兰光
(1.哈尔滨理工大学电气与电子工程学院,哈尔滨 150080; 2.清华大学,汽车安全与节能国家重点实验室,北京 100084)
前言
在建立整车模型的基础上,利用能量流图的方法分析几种能量分配控制方法,通过比较得到一种能够提高燃油经济性和零部件效率的能量分配方法。
插电式混合动力汽车(plug-in hybrid electric vehicle,PHEV)是指可通过外部充电装置从电网中获取电能的混合动力汽车[1]。PHEV能够在保证整车动力性能的前提下,在电能消耗续驶里程内主要通过电力驱动系统驱动车辆,从而充分利用电网电能[2]。目前国外许多汽车制造商及研究机构针对不同构型的PHEV开展了相关的研究工作[3-5]。
为保证PHEV具有良好的节能效果,需要在对构型分析和系统匹配的基础上,进行能量分配控制方法的研究。本文中针对一款插电式串联混合动力汽车(plug-in series hybrid electric vehicle,PSHEV)
1 PSHEV动力系统构型分析
本文中研究的PSHEV是在传统电动汽车构型的基础上,采用原动机和发电机构成的辅助功率单元(auxiliary power unit,APU)来弥补动力电池存储能量少而带来的不足,达到增加电驱动车辆行驶里程的目的。
PSHEV动力系统构型如图1所示,主要由驱动电机、动力电池和APU 3部分构成。
发电机输出的电能和动力电池储存的电能可以分别或混合后为驱动电机提供能量。系统通过发电机—电机实现机械能—电能—机械能的转换,将传统汽车机械耦合传动变成电传动,发动机与车辆实现完全机械解耦,其运行工况不受汽车行驶工况的影响,发动机可以始终控制在最佳的工作区内稳定运行。
2 PSHEV动力系统匹配和部件选型
设计的PSHEV动力系统匹配和部件选型方案如图2所示。
动力系统匹配和选型过程中,首先通过分析道路工况和整车的功率需求,决定对整车动力源的功率要求,由于所设计的PSHEV为电驱动平台汽车,即通过整车功率需求可确定牵引电机的功率,通过车辆的加速和爬坡度的计算,可得到牵引电机的最大转矩和变速器(减速器)的速比。按照续驶里程的要求,可计算得到动力电池的容量参数。根据道路工况,确定APU的平均功率后,可通过建立原动机高效区、发电机高效区和电池电压的参数关系,对APU进行匹配和选型。
2.1 道路工况和整车性能参数分析
车辆性能要求主要取决于运行状态,因此设计时需要考虑循环工况和道路要求。图3和图4分别为我国乘用车的城区和城郊快速循环工况图。由图可看出,乘用车在城市工况下平均运行速度为20~60km/h,在城郊最高车速可达118.43km/h。
为保持原车的动力性,同时考虑PSHEV主要应用于城区道路的场合,参见文献[6]中对我国各级公路主要技术指标、车库内通车道的最大坡度数据以及日系乘用车最高车速和爬坡能力的论述,设计PSHEV的动力性目标如表1所示。
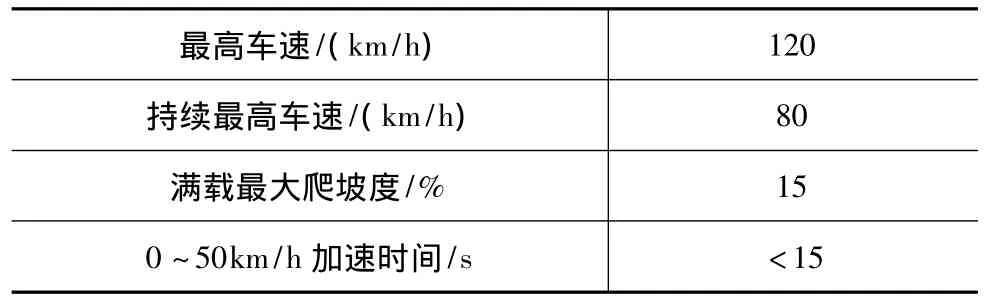
表1 PSHEV动力性设计目标
根据本文中所研究的实验样车车型,计算中采用车型参数如表2所示,计算所用参数如表3所示。
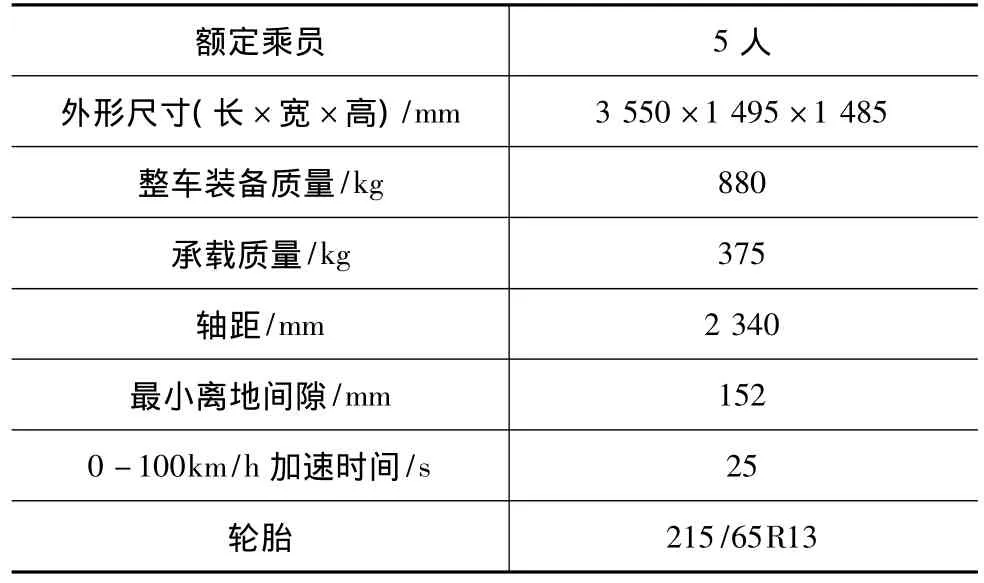
表2 PSHEV车型基本参数
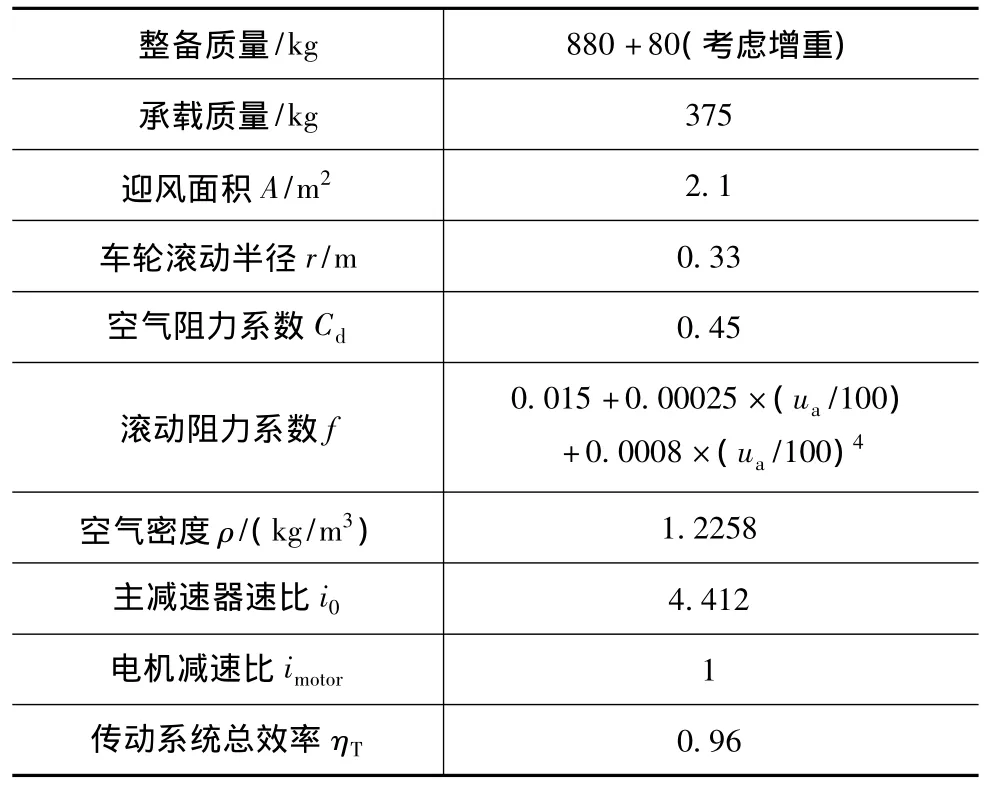
表3 PSHEV计算参数表
2.2 驱动电机的选型
计算过程中认为PSHEV行驶在理想的道路上,即空气绝对速度为零。
式中:Ft为电机牵引力;Ff为滚动阻力;Fw为空气阻力;Fi为坡度阻力;Fj为加速阻力;f为滚动阻力系数;m为汽车质量;g为重力加速度,取9.8m/s2;i为坡度;Cd为空气阻力系数;A为车辆迎风面积;ρ为空气密度;ua为车速。
根据表2和表3的参数,汽车以满载质量在不同坡度的道路上匀速行驶时,由式(1)和式(7)可以分别计算得到驱动电机的牵引力如图5所示,牵引功率需求如图6所示。
将行车阻力折算到电机输出转矩,可以得到如图7所示数据。
以PSHEV平均速度60km/h、在爬坡度为9%的道路上运行,以车辆最高设计速度在平坦道路上运行作为确定驱动电机额定功率的重要参考;以PSHEV在9%坡度,车速为80km/h条件运行时所需功率作为确定驱动电机最高功率的重要参考。与此同时,驱动电机输出转矩还需要保证能够爬上36%的坡度。根据图7,可以确定驱动电机在此条件下运行功率为
P(9%,60km/h)≈25kW
P(9%,80km/h)≈37kW
P(0%,120km/h)≈28kW
在满足减速比的条件下,最高功率37kW的驱动电机完全满足车辆在水平道路上以120km/h高速运行时28kW的功率需求。因此,驱动电机的最高功率为
Pmax=25~37kW
驱动电机转速与汽车行驶速度之间的关系为
式中:ua为车速;n为驱动电机转速;r为车轮半径,m;ig为变速器速比;i0为主减速器速比。
若原型车采用驱动电机直驱方式,即ig为1,而主减速比 i0按原型车主减速比计算,车辆以120km/h速度行驶时,根据式(8)可以计算出对应的电机转速为4604r/min。因此电机最高转速应达到4600r/min以上,最大转矩应大于350N·m。
2.3 动力电池选型
动力电池电压要和PSHEV的电压等级和变化范围一致,容量要满足PSHEV在运行过程中对能量的要求,最大充电功率和放电功率要满足发电机和驱动电机的功率要求。考虑到所选驱动电机外电压,本文选择电池端电压为240V。电池组容量的选择主要考虑车辆行驶时的最大输出功率和消耗的能量,以保证PSHEV的动力性和续驶里程要求。结合PSHEV纯电动续驶里程指标计算所需动力电池的容量。为避免电池过度放电,参见文献[7]中的计算,纯电动续驶里程以电池容量的75%来计算。
式中:s为等速运行速度时的续驶里程;Pm为驱动电机需求功率;Pbat,out为电池输出功率;Ubat为电池端电压;Wbat为电池能量;Qbat为电池容量。
根据式(9)可以分别计算坡度为0%时,车辆分别以40、60和80km/h等速运行,续驶里程在100km时所需的电池容量,如表4所示。
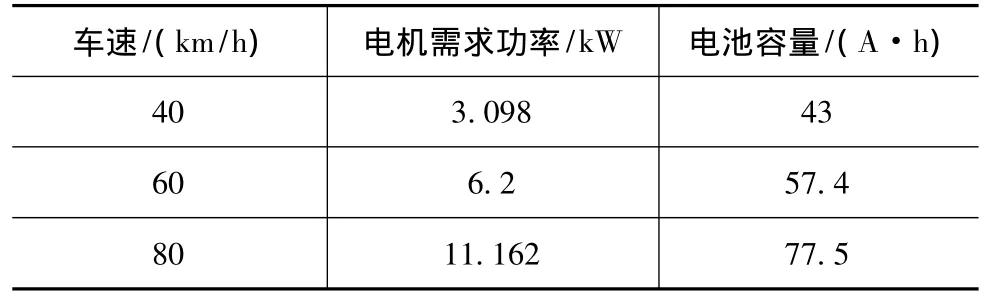
表4 不同车速下PSHEV所需电池容量计算结果
根据我国颁布的GB/T18386—2001《电动汽车能量消耗率和续驶里程试验方法》中的要求,并结合参考文献[7]中的计算,在设计续驶里程100km的情况下,选择以60km/h等速运行时所需电池容量作为电池容量要求,结合实际情况,选择电池容量为60A·h。
2.4 发电机选型
由于发电机产生的电能主要用来给驱动电机提供稳态功率,因此在发电机选型的功率设计中主要考虑驱动电机功率需求和附件设备消耗功率需求。
2.4.1 驱动电机需求
乘用车在城区工况下电机的工作点分布如图8所示,城郊快速工况下电机工作点分布如图9所示。
由图8和图9可以看出,城区工况时驱动电机最大功率不大于38kW,平均功率为3.25~4.33kW。快速工况时驱动电机最大功率约为45kW,平均功率在9.14~9.79kW之间。综上所述,驱动电机输出功率应该在3.25~45kW之间。
2.4.2 附件设备消耗功率需求
PSHEV附件设备消耗功率大约占整车驱动功率的15%左右[6]。若考虑怠速不停机策略,在城区工况APU输出功率不应小于3.74kW。快速工况时APU输出功率不应小于10.5kW。考虑怠速停机策略,在城区工况时APU输出功率应不小于5kW。在城市快速工况时APU输出功率应不小于11.3kW。
根据以上分析,可选取永磁同步发电机额定功率为12kW。此时可满足整车在80km/h匀速时所需功率。同时,所选取60A·h容量的电池在1C放电下能提供14.4kW的功率,加上永磁同步发电机输出功率,基本能够满足最高车速120km/h的功率需求。为此,选择某公司生产的高速永磁发电机,其效率曲线如图10所示。由图10可知,当发电机转速在3000~3500r/min,转矩在50N·m左右时,效率最高可达90.5%。
2.5 发动机选型及其工作点的确定
在选择发动机时,须考虑发电机和附件设备消耗功率,并与发电机匹配共同工作在最佳油耗区域。
由于已选择发电机额定功率为12kW,考虑发电机的平均效率(按87%计算),则发动机需要选择的额定功率应大于13.79kW。为此选用某公司生产的3缸四冲程0.8L发动机,其实测燃油经济工作曲线如图11所示。
由图11可知,发动机在2400~3200r/min,转矩为50~65N·m区间时,燃油消耗量最低,与发电机的高效区实现了匹配。
3 整车性能仿真
为验证PSHEV匹配选型的合理性,在Matlab/Simulink中建立了整车模型,在此基础上进行了整车动力性能仿真,结果如表5所示。由表5可见,所设计的PSHEV可以满足整车动力性能指标。
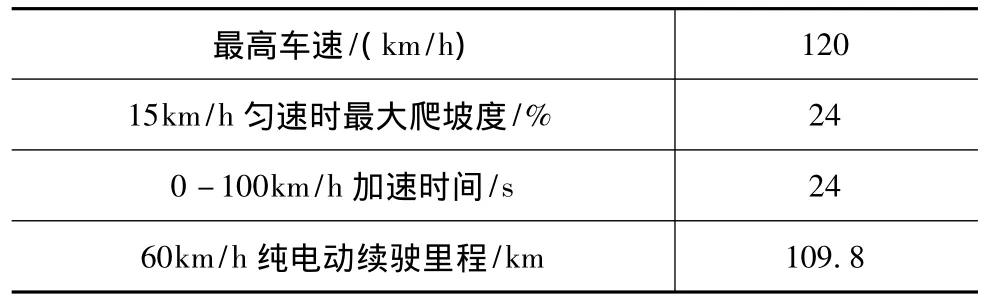
表5 PSHEV整车动力性能仿真结果
为分析所设计PSHEV的经济性,选择我国城市道路工况作为循环工况,采用ON-OFF、负载跟随以及ON-OFF与负载跟随相结合的3种不同控制方法,进行了整车仿真分析。
仿真分析主要在插电式混合动力汽车应用模式和电量维持模式两种情况下进行。其中插电式混合动力汽车应用模式为初始SOC=0.9,纯电动至SOC较低时开启APU,使之处于电量维持模式。电量维持模式指循环工况下维持SOC在0.2~0.4之间。
3.1 ON-OFF控制方法仿真
电量维持模式下,采用ON-OFF控制方法,APU开启后一直在输出功率为15kW的工作区。此时动力电池电压、发动机转速、APU输出电流和SOC随工况循环波动的曲线如图12所示。
由图12可知,在SOC达到0.2以下时,APU开启工作,此时APU输出功率为15kW,当SOC达到0.4以上时,APU停止工作。
图13为ON-OFF控制方法下发动机的工作区域。由图13可见,采用ON-OFF控制方法,发动机处于负荷较高的工作区,即工作在燃油经济性较好的区域,因此APU系统具有较好的燃油经济性。
图14为采用ON-OFF控制方法的能流图。
由图14可见,采用ON-OFF控制方法时,由于汽油发动机的负荷较高,因此发动机效率可达27.14%,但电池存在较频繁的充放电情况,因此电池损耗较高,电池的充放电效率为95.43%。APU中发电机及整流桥的综合效率在89.44%,发电机基本工作在高效区,当附件设备消耗功率为0.6kW时,附件消耗的能量达到燃料等价能量的4.79%,因此可从减小附件设备消耗功率着手减小能耗损失。
插电式混合动力汽车应用模式下,采用ON-OFF控制方法,电池SOC达到0.2时开启APU工作,当SOC达到0.4时停止APU工作。此时电池SOC、直流母线电压、电池电流和APU输出功率变化曲线如图15所示。
3.2 负载跟随控制方法仿真
采用辅助功率单元负载跟随控制方法,电池SOC维持在0.2~0.4之间,采用由道路工况决定的整车负载作为目标,功率辅助单元进行功率跟随输出。动力电池电压、发动机转速变化、APU输出电流和SOC随工况波动的曲线如图16所示。
图17为采用负载跟随控制方法发动机的工作区域。由图17可以看出,采用负载跟随控制方法,发动机工作于较窄的转速范围内,由于负载跟随功率从0开始,因此发动机既工作于负荷较高的高效工作区,又工作于怠速等燃油经济性较差的区域。因此APU系统的燃油经济性较差。
图18为采用负载跟随控制方法时系统的能流图。由图18可以看出,采用负载跟随控制方法时由于汽油发动机的输出功率跟随路况决定需求功率,因此发动机工作点不全在高效区,效率只达到18.89%,但电池不存在较频繁的充放电情况,因此电池损耗较低,电池的充放电效率为98.14%,电池的充电能量主要由制动能量回馈提供。由于发电机不只工作在高效区,因此APU中发电机及整流桥的综合效率为73.74%。当附件消耗功率为0.6kW时,附件消耗的能量达到燃料等价能量的2.58%。
插电式混合动力汽车应用模式下,采用负载跟随控制方法,电池SOC达到0.3时开启APU工作,进行电量维持控制。电池SOC、直流母线电压、电池电流和APU输出功率变化曲线如图19所示。
3.3 ON-OFF与负载跟随结合的控制方法仿真
采用ON-OFF与负载跟随结合的控制方法,指电池SOC维持在0.2~0.4之间时,辅助功率单元输出功率范围为10~20kW,即APU最小开启功率为10kW。此时动力电池电压、发动机转速、APU输出电流和SOC随工况循环波动的曲线见图20。
由图20可以看出,在 SOC达到0.2以下时,APU开启工作,此时APU输出功率由负载功率决定,而跟随的范围为10~20kW。
图21为ON-OFF与负载跟随控制下发动机的工作区域。由图21可见,采用ON-OFF与负载跟随相结合的控制方法时,发动机工作在相对较好的燃油经济性区域,APU系统具有较好的燃油经济性。
图22为采用ON-OFF与负载跟随结合控制方法下的能流图。由图22可见,采用ON-OFF与负载跟随相结合控制方法时,由于汽油发动机的输出功率跟随路况决定需求功率,且最小输出功率为10kW,因此发动机工作点在经济性较高区域,效率达到24.62%,在APU输出功率较大时,由于实现了负载跟随,因此电池充放电效率好于ON-OFF控制方法。APU中发电机及整流桥的综合效率为88.13%。当附件设备消耗功率为0.6kW时,附件消耗的能量达到燃料等价能量的4.6%。
3种不同控制方法在电量维持条件下,燃油经济性的仿真结果如表6所示。
由表6可以看出,采用ON-OFF控制方法,由于发动机无怠速状况,且工作点均处于燃油经济性较好的高效工作区,因此燃油经济性较好。但由于ON-OFF存在频繁的电池充放电状况,因此电池的损耗较大,达到了4.57%。采用负载跟随控制方法,发动机存在怠速运行状况,且工作点分布在转速范围较窄的工作区域,因此燃油经济性较差,但是由于APU的输出功率是以负载的要求作为目标,因此电池充放电的状况较少,电池损耗较小,为1.86%。为此,采用ON-OFF与负载跟随相结合的控制方法,既可解决ON-OFF控制时电池损耗较高的问题,又能避免负载跟随控制时发动机处于低效区的情况。
插电式混合动力汽车应用模式下,采用ON-OFF与负载跟随结合的控制方法,电池SOC、直流母线电压、电池电流和APU输出功率变化曲线见图23。

表6 3种控制方法经济性仿真结果对比
4 结论
(1)在分析PSHEV构型和道路工况功率需求的基础上,通过设计参数匹配和选型方案,建立了驱动电机功率、动力电池容量、汽油发动机和永磁同步发电机高效工作区等参数的关系,实现了PSHEV各部件的参数匹配与选型。
(2)在建立系统仿真模型的基础上,分别对ONOFF、负载跟随以及ON-OFF与负载跟随相结合的3种控制方法进行了仿真,并通过能流图进行了系统能效分析。仿真结果表明,采用ON-OFF与负载跟随相结合的控制方法可以在改善燃油经济性的同时,实现关键系统部件效率的提高。
[1]李献菁,孙永正,邓俊,等.插电式串联混合动力汽车发动机起停控制策略的优化[J].汽车工程,2011,33(2):112-117.
[2]张博,李君,高莹,等.Plug-in混合动力汽车能量管理策略优化设计[J].农业机械学报,2009,40(9):20-25.
[3]Scott Jason Moura,Hosam K Fathyu,Duncan S Callaway.A Stochastic Optimal Control Approach for Power Management in Plug-in Hybrid Electric Vehicle[J].IEEE Transactions on Control Systems Technology,2011,19(3):545-555.
[4]Reza Ghorbani,Eric Bibeau,Shaahin Filizadeh.On Conversion of Hybrid Electric Vehicles to Plug-in[J].IEEE Transactions on Vehicular Technology,2010,59(4):2016-2020.
[5]Sharer P B,Rousseau A,Karbowski D,et al.Plug-in Hybrid E-lectric Vehicle Control Strategy:Comparison Between EV and Charge-depleting Options[C].SAE Paper 2008-01-0460.
[6]Lu Languang,Ouyang Minggao.How to Determine the Electric Car Design Specifications[C].The 25thWorld Battery,Hybrid and Fuel Cell Electric Vehicle Symposium & Exhibition,Shenzhen,2010,November 5-9.
[7]孙永正,李献菁,邓俊,等.插电式串联混合动力轿车的选型匹配与仿真[J].汽车工程,2010,32(12):1015-1020.
猜你喜欢
太阳能(2022年2期)2022-03-07
一重技术(2021年5期)2022-01-18
故事作文·高年级(2021年12期)2021-12-21
建材发展导向(2021年18期)2021-11-05
建材发展导向(2021年15期)2021-11-05
建材发展导向(2021年6期)2021-06-09
红领巾·探索(2020年2期)2020-05-19
电子制作(2019年7期)2019-04-25
科技视界(2016年18期)2016-11-03
军事文摘·科学少年(2016年8期)2016-11-02