
高分辨率详普查结合型遥感成像技术
2013-09-17 02:13赵惠樊学武邹刚毅庞志海王炜任国瑞杜云飞苏宇
航天返回与遥感 2013年3期
赵惠 樊学武 邹刚毅,2 庞志海,2 王炜 任国瑞 杜云飞 苏宇
(1 中科院西安光学精密机械研究所空间光学室,西安 710119)(2 中国科学院研究生院, 北京 100049)
1 引言
目前,空间光学观测技术已经广泛应用于空间天文观测、深空探测及对地观测等领域[1-2]。通常来讲,空间对地观测包含详查和普查两类。普查强调的是相机的观测覆盖能力,而详查则强调的是相机的高分辨率信息获取能力。考虑到多层次信息获取的需求,详普查一体化将成为未来空间对地观测光学系统的一个重要发展方向,而变焦技术恰好能满足这样的要求[3]。然而,由于传统光学或机械补偿式变焦都存在运动部件,对卫星平台及相机本身会带来以下影响:1)运动部件的启动和停止会对卫星平台带来干扰,破坏动量平衡;2)大口径部件的运动提高了对相机支撑结构稳定性、控制系统功耗等的要求;3)驱动运动部件到达指定位置所需的时间可能导致系统响应时间增大,从而会降低相机详普查切换的时效性要求。因此,在变焦的同时,能否回避运动部件成为详普查结合型相机设计的一个重点考虑因素。
随着材料、电子学等学科的快速发展,光学系统中的常规镜片可以被由特殊材料制造的主动光学元件替代,变形镜就是其中之一。由于变形镜的面形曲率半径可以通过电控的方式予以改变,所以很适合无运动部件变焦系统的设计要求。美国、德国等航天强国在此方面都已积极开展了相关的研究工作,并初步给出了一些有潜在应用价值的设计实例。德国Dresden 大学的研究人员于2009–2011年间提出并围绕一种基于压电变形镜PDM 的离轴四反变焦光学系统展开研究。在该系统中,主镜和四镜均采用变形镜,通过控制变形镜的曲率,实现了3 倍变焦的原型设计,光学系统如图1所示[4-5]。其中,不同颜色的光线代表不同视场。
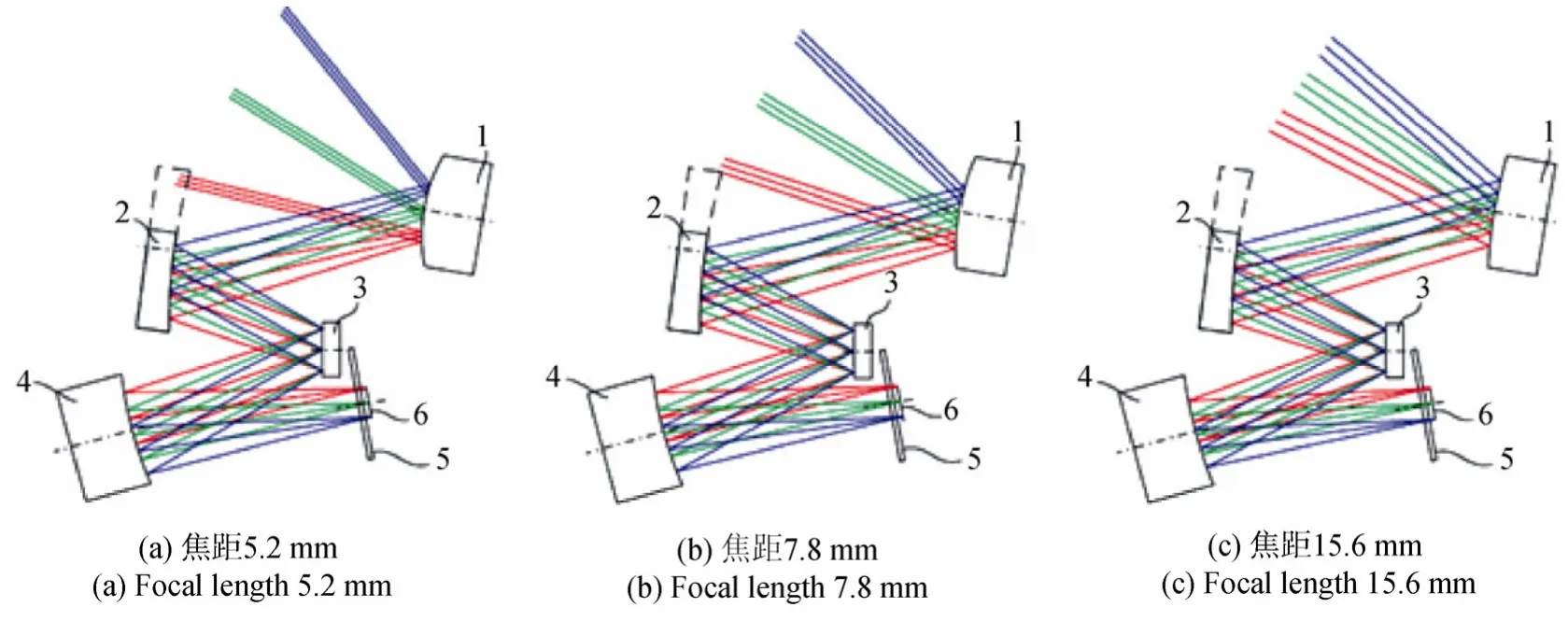
图1 采用变形镜的无遮拦全反射变焦光学系统Fig.1 All-reflective unobscured zoom optical system using deformed mirrors
2 方案原理
光学系统初始结构求解时,为简化问题分析,只求解光学元件的光焦度及光学元件的间隔。光学系统的基本结构可简化为如图2所示(其中,d1,d2,s 分别表示元件之间的间隔;rp表示光学系统归一化的匹兹万半径)。为保证初始结构计算结果的通用性,用光学系统短焦位置的光焦度对各个光学参数(如间隔、口径、曲率半径)进行归一化。这样计算结果将不会局限于特定的设计,可通过缩放来满足不同设计参数的需要。

图2 变焦光学系统线性模型(其中1、3为变形镜)Fig.2 Linear model of zoom optical system(1,3,deformed mirror)
在变焦过程中,光学系统中变形镜光焦度的变化将会引起场曲的变化,通常情况下场曲不能被完全校正。在光学系统初始设计阶段必须考虑光学系统的场曲最小化设计,这可以通过同轴系统的匹兹万和获得,对于具有N个光学元件的光学系统,其匹兹万和公式为
式中 Φ 表示归一化的光焦度;f 表示归一化的焦距。
在确定了光学系统的结构形式之后,接下来需确定光学元件的个数及其组合形式。初始结构为反远距结构,所需最少元件数量为2个(1个正光焦度元件、1个负光焦度元件),但是两个光学元件的光学结构形式没有足够的自由度来校正像差,因此至少应采用3个光学元件来满足系统像差校正的要求。由光学系统的ABCD 矩阵理论可知,各光学元件可以通过2×2 的矩阵来表示:

光学系统各元件间的间隔可以表示为:
近轴光学矩阵M 表示整个光学系统,

其中 A,B,C,D 分别为:

光学系统的焦距f为

后截距s为

则第一个光学元件的光焦度Φ1和第三个光学元件的光焦度Φ3可表示为:


上述为两个变形镜的光焦度表达式,主要有4个自由变量来优化系统性能(3个间隔(d1、d2、s)及光焦度Φ2)。
3 技术实现
3.1 光学参数的确定
假设拟构建的相机工作于500km 轨道,当取探测器像元尺寸为常见的10μm 时,如果要求一台相机实现2m和4m 分辨率,其所对应的焦距是2.5m和0.625m;此外,考虑到当前及未来可能发展到的水平,希望该系统普查的半视场角和详查的半视场角分别至少为16°和1°(实际设计得到的结果为16.7°和1.15°)。同时,相机工作于450~900nm 谱段,为了保证有效光能量,详普查系统F 数分别为15和8。
3.2 光学系统的选型
光学系统结构形式的选择对于设计结果的成功与否至关重要,应在满足系统指标的前提下尽可能的选择那些有利于设计、制造和装配的结构形式。由于宽视场相机视场为16.7°,对反射光学系统来说视场较大;若采用折射系统,则不需要考虑视场问题,但由于系统工作谱段为450~900nm,谱段较宽,从而必然会存在色差校正方面的问题,且大尺寸的透镜会给光学备料和加工带来很大的压力;而若采用全反射光学系统,则不需要考虑色差的影响,但16.7°的视场对于一般的反射光学系统来说,设计仍然比较困难。所以选择合适的光学系统形式成为本光学系统设计的关键[6-8]。
综合各种因素,本文设计实例采用视场离轴的Walrus 四反射光学系统结构,这种光学系统第一镜为凸面镜,孔径光阑放在第三镜上,可以满足16.7°×1.15°的视场要求,通过视场的离轴消除了中心遮拦,同时反射面采用高次非球面,可以有效地校正高级像差。采用变形镜来实现焦距的变化。但是在具体设计中,由于普查视场较大,光学系统孔径光阑位于第三镜上,造成主反射镜口径较大,给加工和结构支撑带来相当大的挑战。综合考虑后采用2 台相机视场拼接的方案来减小主反射镜的口径,即普查的视场变为16.7°×1.15°。
3.3 光学系统优化设计
经过反复的优化设计,详普查光学系统(叠加在一起)的最终形式如图3所示。系统共有4个反射镜,孔径光阑放在第三反射镜上,是全系统中口径最小的位置,因此也是变形镜的理想位置。可以看到,为了分担变形镜所承担的光焦度,普查和详查的主镜相互分离,分别具有不同的顶点曲率半径和非球面系数,即详查和普查分别使用单独的主镜,从而降低了变形镜研制的技术指标要求。其中,普查系统视场偏置10°,详查系统视场偏置4.5°,从而避开了中心遮拦;各反射镜的曲率中心位于同一直线上,除第三反射镜中心在这条直线上外,其它反射镜均为离轴非球面,像面中心也有相应的离轴。通过控制第三反射镜,即变形镜的面形曲率可以实现焦距的变化。当系统在详普查模式之间切换时,各反射镜在轴向的相对位置保持不变,焦面有一定的轴向移动。同时,为方便焦平面组件布局,在焦面前可加入平面折转镜将光路进行折转。

图3 详普查光学系统合成光路示意图Fig.3 Scheme of general and detailed investigation optical systeme
3.4 光学系统性能评价
为了全面衡量普查光学系统的性能, 考虑到光学系统关于YZ 面对称, 选取A(0°,–9°)、B(0°,–10°)、C(0°,–11°)、D(5°,–9°)、E(5°,–10°)、F(5°,–11°)、G(8.35°,–9°)、H(8.35°,–10°)、J(8.35°,–11°)共9个视场点,利用MTF 曲线评价光学系统性能。普查光学系统与详查光学系统各视场的MTF曲线均与衍射受限MTF 曲线紧密重合,意味着详普查系统均有良好的成像品质。其中,普查光学系统在空间频率为50 线对/mm 处的MTF 值达到了0.64 以上,且全视场最大畸变仅为–2.39%;而详查光学系统在同样的空间频率位置也达到了0.37 以上,全视场最大畸变仅为0.57%。
4 试验与仿真
4.1 验证用光学系统设计及变形镜的选择
为了检验光学杠杆原理结合变形镜实现无运动部件变焦的有效性,构建了缩比系统原理样机来进行试验评估。试验验证系统在系统形式上与上述光学系统设计实例保持一致,也采用一块变形镜放置于孔径光阑上,主镜分离且具有两个焦面,焦距可以在48~192mm 之间进行切换。光学系统及其参数如图4和表1所示。
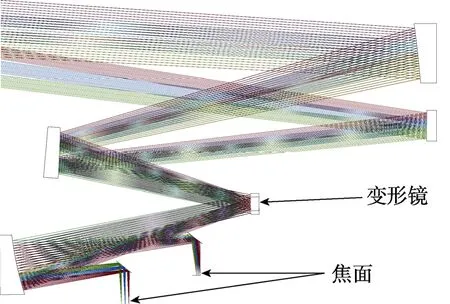
图4 验证用光学系统Fig.4 Experimental optical system used for verification of principle

表1 光学系统参数Tab.1 Optical system parameters
系统焦距的变化是通过放置于第三镜的变形镜的曲率变化来实现的,光学系统的设计要结合变形镜的物理特性进行,其中重点要考察的就是变形镜所能产生的最大形变量是否满足变焦的要求。根据光学系统参数不难计算得出,如果变形镜的初始形状为平面,要变化到两档焦距所要求的面形曲率,要求其中心最大形变量均在2μm 之内,而市面上可以买到的科学级器件其形变量通常都在15μm 以内,能够保证有合适的器件用来进行试验验证。综合考虑各种因素,这里选用荷兰OKO 公司的变形镜产品。
OKO 公司的压电变形镜和微机械薄膜变形镜从主要参数,如通光口径、形变量、响应速度等方面是可以互相替换的,但是由于其发生形变的机理不同,压电变形镜既可以产生凸面,也可以产生凹面,而微机械薄膜变形镜受限于静电吸引原理,只能产生凹面,所以必须根据验证系统中三镜的特点确定所使用的变形镜类型。在上述系统中,要求变形镜必须是凸面反射镜,因此只能选择压电变形镜。当焦距为48mm 时,变形镜有效口径为6mm;而当焦距为192mm 时,变形镜有效口径为12.8mm,所以压电变形镜的全口径必须在15mm 以上。通过查阅OKO 压电变形镜的产品列表,最终选定30mm 口径、37个控制通道的器件用于变倍成像试验。
4.2 变倍成像试验及数据分析
试验由3个部分组成:1)将相机中变形镜所处位置用两块常规反射镜来代替(如图5所示),并进行成像试验,以此说明光学杠杆作用确实利用关键位置元件光焦度的微小变化来实现系统焦距的大幅度改变;2)设计补偿镜,利用Zygo 干涉仪单独测试变形镜通过精密控制是否能够达到成像所需要的面型精度;3)将真实的变形镜安装到相机系统相应的位置,在干涉仪的帮助下进行全系统的波像差检测。

图5 用替代反射镜代替真实变形镜示意Fig.5 Replacement of DM by fixed curvature mirror
首先,由变倍成像结果(如图6所示)可以看到,当第三镜,即变形镜的曲率发生变化时,确实能够实现所期望的变倍成像效果,并且系统具有良好的成像品质,说明光学杠杆作用是正确的。

图6 实现变倍成像Fig.6 Imaging results
其次,在光学杠杆作用得到验证后,应该单独检测变形镜的面形精度在精细控制之下是否能够达到常规反射镜的镜面要求。通过精细地控制变形镜各个位置的驱动电压,不但能够达到不同焦距系统所要求的面形曲率值,还能够实现面形精度RMS 优于0.02λ(λ=632.8μm)的结果,完全可以用于高品质的成像。这里进行的是开环的控制,如果采用闭环控制,面形精度可达到更高的水平。
最后,对变形镜进行电压精细调节后,将真实的变形镜安装到相机中,使用已经获得的电压数据将其面形变化到需要的状态附近,然后使用干涉仪对全系统波像差进行了检测和调节。结果表明,试验相机系统波像差在焦距分别是48mm和192mm 时均能够达到RMS 优于0.07λ(λ=632.8μm),可以进行高品质的变倍成像。
5 结束语
本文在对国外详普查相结合的空间光学观测技术进行分析的基础上,结合具体的设计指标,提出了一种基于变形镜的新型变焦距光学系统设计方案。通过改变变形镜的曲率半径,最终的光学系统具有两档焦距切换能力,成像性能达到衍射极限,从而实现详普查结合。本文还构建了针对原型系统的缩比成像系统,用于实地检验这种基于变形镜实现无运动部件变焦的有效性。试验取得了预期的结果,证明基于变形镜结合光学杠杆作用是完全能够实现无运动部件的变焦。
基于变形镜实现详查和普查的关键在于:变形镜的主要指标,如最大形变量、有效口径以及对像差的校正能力等都必须在合理的范围之内,从而保证工艺上的可行性;此外,变形镜的种类很多,哪种类型能够满足本文所要求的变焦指标必须在后续工作中进行详尽的论证。在本文所设计的原型系统中,采用变形镜这种主动光学元件可以实现无运动部件的变焦,对于对动量平衡要求比较严格的卫星平台来说具有潜在的应用价值。然而,美国、德国的研究也表明,符合设计要求的变形镜,从原理研究到实际研制过程都存在非常大的难度,需要持续投入来推动相应技术的进步和发展,从而为新型的成像系统的设计实施铺平道路。
References)
[1]岳涛, 李博, 陈晓丽, 等.空间光学发展现状和未来发展[J].航天返回与遥感,2011,32(5):1-9.YUE Tao,LI Bo,CHEN Xiaoli,et al.The Current and Future Development of Space Optics[J].Spacecraft Recovery & Remote Sensing,2011,32(5):1-9.(in Chinese)
[2]张新, 付强.空间光学系统技术发展探讨[J].航天返回与遥感,2011,32(5):29-35.ZHANG Xin,FU Qiang.The Technological Investigation on Space Optical Systems Development[J].Spacecraft Recovery & Remote Sensing,2011,32(5):29-35.(in Chinese)
[3]Johnson R B,Hadaway J B,Burleson T.All-reflective Four-element Zoom Telescope:Design and Analysis[J].SPIE ,1990,1354:669-675.
[4]Kristof Seidl,Katja Richter,Jens Knobbe,et al.Wide Field-of-view All-reflective Objectives Designed for Multispectral Image Acquisition in Photogrammetric Applications[C].Proceeding of SPIE,2011,8172:817210-1-817210-10.
[5]Kristof Seidl,Jens Knobbe,Heinrich Grüger.Design of an All-reflective Unobscured Optical-power Zoom Objective[J].Applied Optics,2009,48(21):4097-4107.
[6]Johnson R B.Unobscured Reflective Zoom Systems[J].SPIE,2539:225-218.
[7]Johnson R B,Mann A.Evolution of a Compact,Wide Field-of-view,Unobscured,All-reflective Zoom Optical System[J].SPIE,3061:370-375.
[8]潘君骅.光学非球面的设计、加工和检验[Z].第一版,苏州:苏州大学出版社,2004.PAN Junhua.The Design,Manufacture and Test of the Aspherical Optical Surfaces[Z].The First Edition,Suzhou:Suzhou University Press,2004.(in Chinese).
猜你喜欢
新能源科技(2022年9期)2022-11-20
现代电子技术(2022年18期)2022-09-17
摄影与摄像(2021年12期)2021-10-01
科学技术创新(2021年25期)2021-09-11
艺术品鉴(2021年21期)2021-08-15
空军工程大学学报(2020年1期)2020-06-12
锦绣·上旬刊(2020年3期)2020-06-08
空间控制技术与应用(2019年6期)2020-01-09
航天返回与遥感(2019年2期)2019-05-17
航天返回与遥感(2018年6期)2019-01-07
