
基于巨磁电阻的车位检测技术研究
2014-04-13 02:14马荣贵
交通信息与安全 2014年3期
马荣贵 侯 斌
(长安大学信息工程学院 西安710064)
0 引 言
随着汽车保有量的增加,停车管理成为智能交通研究的1个重要领域,车位检测则是停车智能化管理的重要组成部分。当前有很多对停车位进行实时检测的方案,如地感线圈车位检测[1]、视频车位检测[2]、超声波车位检测[3]等,其中地感线圈的优点是:稳定可靠、价格低廉、抗干扰能力较强,但是缺点也比较明显:埋设地感线圈时,为了提高检测的精确度和可靠性,需对地面进行大面积的切割,这样对地面的破坏比较大,并且地感线圈检测周期较长;视频车位检测的技术到目前为止发展还不是特别成熟,容易受到天气和环境因素的制约,并且检测设备也相对昂贵;超声波检测中超声波传感器具价格比较低廉、检测精度较高等优势,但缺点在于容易受温度变化的影响以及安装和架设受到的诸多限制。以上这些方案都无法适用于大型停车场车位检测的要求[4]。通过研究后笔者提出了1种基于巨磁电阻的车位检测的解决方案,试验结果表明这种车位检测解决方案拥有更高精度和更强稳定性。
1 基于巨磁技术的车位检测原理
巨磁电阻(giant magnetic resistance,GMR)现象由法国科学家的阿贝尔·费尔和德国的彼得·格林贝尔因发现。巨磁电阻就是电磁阻率在有外磁场作用时发生较为明显变化的电阻。巨磁电阻是通过薄膜加工技术在硅片上蒸涂坡莫合金Fe20Ni80薄膜制成的,巨磁电阻效应是1种量子力学效应,该效应产生于由铁磁材料和非铁磁材料薄层交替叠合而成的磁性薄膜结构。当铁磁层的磁矩相互平行时,载流子与自旋有关的散射最小,材料有最小的电阻;反之,载流子与自旋有关的散射最强,材料的电阻最大。
沿坡莫合金合金带的长度方向施加1个电流,在垂直于电流的方向施加1个磁场,会导致两端合金带的内磁化方向朝着电流方向转动,合金带的阻值发生变化,变化值取决于内外磁场合成的磁化方向与电流流向的夹角θ,见图1。
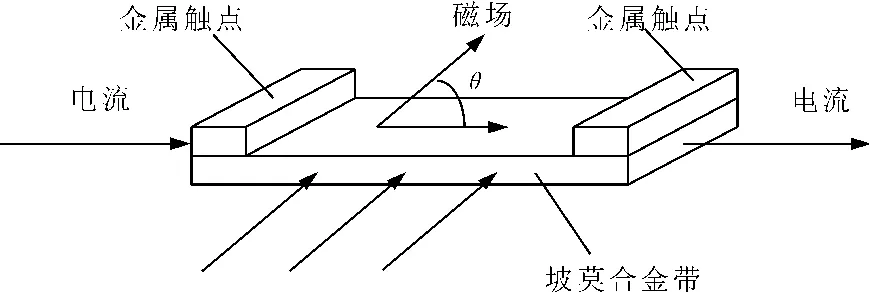
图1 巨磁材料的构造Fig.1 Structure of the giant magnetic materials
地球是1个天然磁体,其磁感应强度B为5 ×10-2mT,方向由地磁南极指向地磁北极,并近似与水平面基本保持平行。因此,当材料的敏感轴与水平面保持垂直状态时,其与地磁场夹角近似为90°,此时地磁场对巨磁电阻产生的影响最小,即式(1)。

式中:θ为磁场与巨磁电阻敏感轴夹角,R1,R2分别为电流方向与磁场方向垂直和平行时坡莫合金的电阻率。
而当车辆经过巨磁材料附近时,车体所携带的铁磁介质将扰乱周围固有的环境磁场,见图2。此时,地磁场不再与巨磁电阻敏感轴保持垂直,这必将影响到巨磁电阻的阻值变化,如果能够精确测量到这一变化量,那么就可以据此判断出车辆的存在与否。
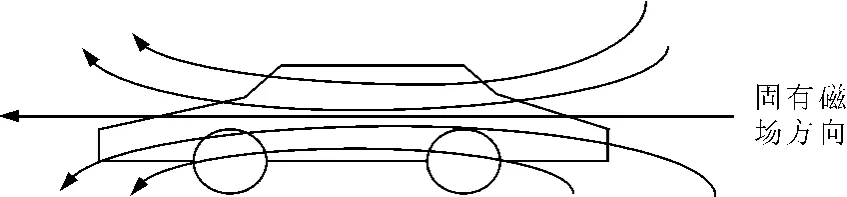
图2 铁磁介质对地磁场扰动示意图Fig 2 Ferromagnetic medium on geomagnetic disturbances schematic
2 系统硬件设计
系统的主要任务是设计基于巨磁传感器[5]的采集电路,对巨磁电阻信号进行放大、滤波、采集,计算得到最终结果。同时依据巨磁电阻的特点,还要设计巨磁电阻的置位、复位电路,与上位机通信电路等。结构框图见图3。
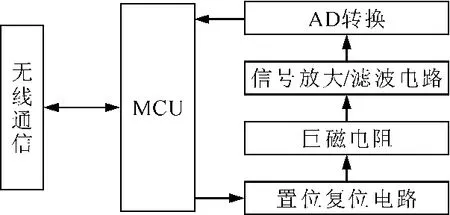
图3 基于巨磁传感器的车位检测结构框图Fig.3 Parking detection structure diagram based on the giant magnetic sensor
2.1 基础模块设计
基础模块主要是由:微控制模块、信号放大模块和无线通信模块等组成的。每个模块在整个系统硬件中完成着不同的功能特性。
微控制器模块负责整个传感器的功能实现。本设计采用的是ATMEL公司AVR系列单片机。AVR单片机内部有多种系统时钟信号,这些信号相对独立运行,用户可根据需要通过软件手段设置,来禁止无用时钟运行,从而达到降低功耗、去除噪声等功能。同时还集成了AD转换和串口通信等功能。
图像的不变距对于图像的平移、尺度变化、镜像和旋转不变。低阶矩主要描述目标的整体特征,如面积、主轴、方向角等;高阶矩主要描述图像的细节,如扭曲度、峰态等[9]。
信号放大模块主要由精密运算放大器AD620构成,AD620是1种低成本、高精度并且具有较好的直流特性和交流特性的放大器,并且可由1个外部可变电阻在在1~1 000倍的放大范围内进行调节。信号通过信号放大模块完成多级放大的输出。
无线通信模块备选的方案有多种,常用有线通信方式有:RS-232、RS-485,USB总线,I2C,单总线,CAN总线,Profibus,Lonworks等;常用无线通信方式有:红外线数据通信IrDA,蓝牙,Wi-Fi,Zigbee,GPRS,CDMA,超带宽通信UWB、近场通信NFC等。针对户外停车场设计,减小停车场对路面造成损坏,不考虑有线通信通信方式。根据传输距离、环境条件、传输速率、设备成本、抗干扰性等各方面因素综合考虑选择适合的通信方式。如表1所列,几种短距离无线通信方式的比较。
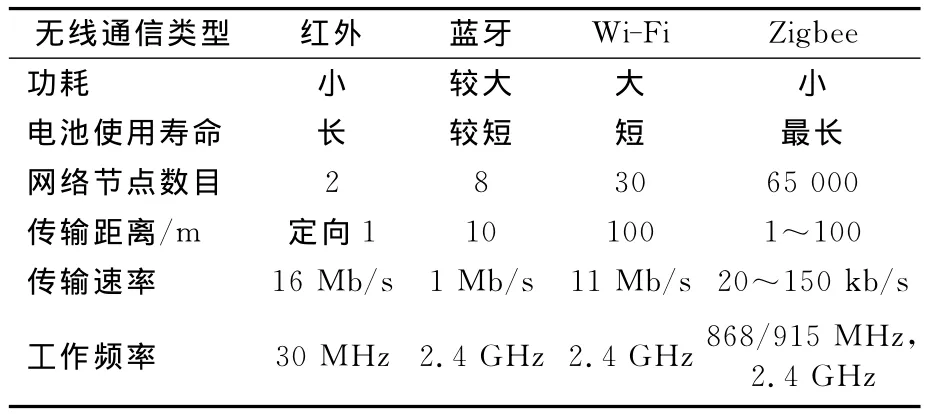
表1 几种短距离无线通信技术比较Tab.1 Comparison of several short-range wireless communications technologies
由表1可见,Zigbee[6]通信方式支持的网络节点数高达65 000个,可以进行大规模组网,而其他几种方式当中Wi-Fi支持的节点数目是最多,但是也只能支持30个节点。停车场传感器与停车位一般都是一一对应的关系,停车位数目一般都大于30,所以其他的几种通信方式无法达到这个要求,这是选择Zigbee通信方式最重要的原因之一。与此同时Zigbee还具有功耗小、工作在全球免费的2.4GHz频段以及通过路由器的中继方式能够延长通信距离等优点,所以本系统选择Zigbee通信方式组建无线传感器网络来传输信息。
2.2 巨磁电阻及其外围电路设计
巨磁电阻采用的是霍尼韦尔公司生产的HMC1021系列[6],其检测精度可达到8.5×10-3uT,远低于地磁感应强度5×10-2mT,在±6× 10-1mT磁场范围内,具有良好的线性度,非常适合于检测地磁场强度。HMC1021的内部复位电路本质上是1个低阻值的电阻带,它紧贴坡莫合金带,当强电流通过时,该电阻带周围产生较强磁场,以激励坡莫合金材料内部原子顺序排列[7]。该电阻带内阻典型值为7.7Ω,如果产生大于0.5 A的电流,则需要使其分压4V左右。由于其阻值非常小,而其要求的驱动时间非常短暂,大约2 μs,采用直接电源驱动的方式有一定风险性,因此,设计中采用电容充放电方式驱动。系统没有提供片上的置位复位脉冲产生电路,因此需要用户专门设计,以便对巨磁电阻进行置位/复位操作。
选用IRF7015作为场效应管,它内部集成了1个N沟道管和1个P沟道管,工作电压为20 V,较低电压下即能有效打开,其特性曲线见图4。
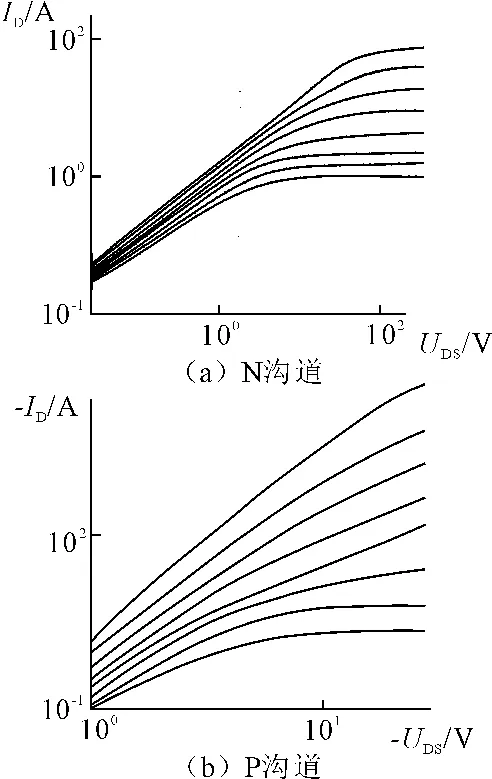
图4 IRF7105场效应管电压-电流特性曲线Fig.4 IRF7105FET voltage-current characteristic curve
由于IRF7105适合工作于10~20V的源-漏电压范围,实际试验结果表明在采用5V供电的电容充放电过程中,置位/复位脉冲超过4V的部分宽度不足,这是由于以下2点造成:
1)电容自身特性。
2)电阻带阻值较低,而场效应管IRF7105在5V电平下并不能达到完全饱和,因此分压较为明显。
解决方法是增大电容以缓和充放电曲线坡度;同时提高系统供电电压至12V,以拉高脉冲峰值,并使场效应管内阻进一步降低,这样可以有效的延长脉冲超过4V的部分。实验结果见图5。
然而场效应管是1个压控开关,其导通和截止受控于Gate端和衬底之间的电压差,小于其电压阈值则场效应管截止,大于其阈值时场效应管打开。经测试,当IRF7105工作在源极-漏极电压为12V时,其阈值为4V左右,即Gate端与衬底压差超过4V即可打开场效应管。但由于单片机控制端采用TTL电平,如直接控制工作在12V电压下的P沟道场效应管M3,当控制端处于最高电压5 V时,其与12V的衬底电压之间压差仍有7V,这就意味着场效应管M3永远不能关断。但同时5V的电压却可以使N沟道场效应管M2不饱和打开,从而造成系统短路。因此在系统中采用1个N沟道场效应管M1,对TTL电平进行转换,以使控制端高电平可以达到与源电压相同的12V,从而避免短路状态的出现。由于场效应管的Gate端与衬底之间的电容特性较为明显,在驱动输入过程中,等效于电容充放电,这时如果电平转换的电路的输出不足,会造成Gate端上升沿缓慢。
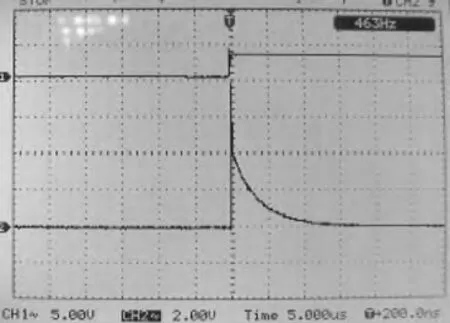
图5 HMC1021置位脉冲特性Fig.5 HMC1021set pulse characteristics
当控制端电压介于4~8V时,会使M2与M3之间的空载电路短时间内短路,虽然由于时间短暂并不会造成危险,但却会使充电电容C1所存储的电势通过M3通路快速泄露。如果这一过程持续时间相对较长,那么电容C2即不能得到有效充电,从而影响置位脉冲的强度,不能达到有效置位的目的。因此应尽量缩短Gate端充电时间,这就需要适当加大电平转换电路输出端的驱动能力。经测试,当限流电阻R=500Ω时,上升沿周期能控制在2μs以内,可以满足系统要求,脉冲特性曲线见图6。
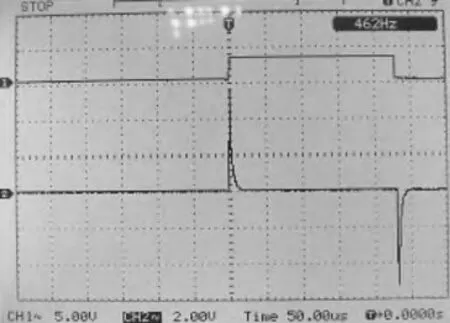
图6 HMC1201置位/复位脉冲特性曲线Fig.6 HMC1201set/reset pulse characteristic curve
3 系统软件设计
系统软件部分所要完成的功能就是采集巨磁电阻输出端的电压信号[9],加以分析处理成车位状态信息,并通过无线通信模块进行传输。对于传感器来说,AD转换和置位/复位控制是软件的核心部分,微控制器只需每0.1s对模拟输入信号进行1次定时采样即可,这就需要1个定时器提供时序。传感器通过Zigbee与上位机进行通信,反馈车位信息。所以其软件功能模块应包括系统初始化、定时/计数器函数、信号采集函数和无线通信函数等,系统软件流程见图7。
1)主程序对ADC、USART、定时器进行初始化,对系统工作模式、工作频率、端口状态和全局变量进行设定,然后循环判断定时器是否溢出。
2)定时器根据初始化参数进行循环计时,如果定时器溢出,则进入定时器中断处理函数,置位定时器溢出信号量,以通知主函数开始1次信号采集。
3)为了消除环境磁场的影响,确保传感器的敏感度,每1次信号采集需要进行置位和复位状态下的2次AD,最终结果由这两次AD的结果计算产生。因此在定时器溢出后,主程序进入信号采集模块,对传感器进行置位/复位操作,并控制ADC进行同步的信号采集,得出最终结果。
4)ADC工作在中断模式下,当转换结束后即进入ADC中断处理函数,函数保存转换结果,然后设置转换结束信号量,通知主程序进行处理,并退出中断。
5)当USART收到主机轮询信号时,立即将当前的车位状态信息通过无线发送出去,并返回。

图7 系统软件流程图Fig.7 Software flow sensor
4 实验测试
检测器测试场所选择了1个室外的公共停车场并安装了巨磁的车位传感器,测试车辆选用了一般的家用轿车,以保证测试结果不失一般性。在实验过程中巨磁车位传感器的微控制器的信号输出与示波器连接,实时采集和显示传感器中信号的变化。首先用示波器观察传感器的运放输出和控制脉冲,其中示波器输入端1为微控制器发出的控制脉冲信号,输入端2为传感器放大输出信号,时间窗大小调整为6s,以保证能观察到1个完整的停车过程,示波器测试结果如图8所示。
图8 停车过程中传感器电压输出波形Fig.8 Sensor voltage output waveform during parking
可以看到,在0~1s时间段,处于无车状态,示波器输入端2的输入电压保持在2V左右;在时间段1~2s之间随着车辆驶入,示波器输入端电压逐步升高到5V左右;车辆停留3s后开始驶离停车区,示波器输入电压逐步回落至2V左右。由于传感器采集的电桥信号为差分信号,在放大至0~5V后,其电中位在2.5V左右,由环境磁场的影响造成约-0.5V的偏差,因此无车状态的输出信号为2V左右。在车辆驶入过程中,磁场受磁体扰动,平直磁场发生扭曲,与巨磁电阻的敏感轴夹角产生变化,反应在示波器上即为电压的逐渐变化。
在实际的通信实验中,令传感器通过无线通信向上位机发送采集到的电压信号,并通过计算机串口进行采集,绘制状态曲线,结果见图9。
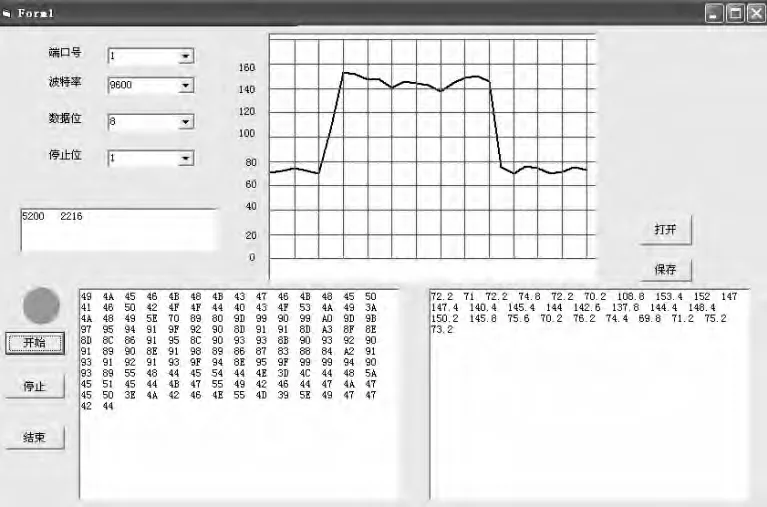
图9 上位机接收到的传感器状态曲线Fig.9 PC receiving the sensor state curves
由实验数据可见,基于巨磁的车位传感器清晰的反映了车位状况,在汽车驶入、停放和驶出传感器有明显的变化,但是由于受到环境磁场影响,传感器基准值会发生一定程度上的发生偏移,因此要根据实际应用环境的磁场强度来动态的设定传感器的电压阈值,从而使得车位检测达到了检测精确性和稳定性的要求。
5 结束语
笔者提出了1种基于巨磁电阻技术的户外车位检测方案,并完成了硬件和软件系统的设计,通过车位检测的实际应用后相较于地感线圈车位检测、视频车位检测、超声波车位检测等技术方案,本方案无论在设备安装、检测精确性以及长期应用的稳定性上都有一定的优势,所以基于巨磁电阻的车位检测系统在现实运用和技术发展方面都会有很大的空间。
[1] 毛朔南,林仲扬.机动车地感线圈式测速系统使用中应注意的几个问题[J].计测技术,2012(5):53-55.
[2] 蒋大林.视频车位检测器[J].智能建筑与城市信息,2006(1):36-38.
[3] 赵亚妮,高 辉.基于超声波的车辆检测器设计[J].计算机测量与控制,2011,19(10):2542-2544.
[4] 周嗣恩,韩凤春.智能化停车场管理体系研究[J].中国人民公安大学学报:自然科学版,2008(1):87-89.
[5] 众 欣.巨磁电阻效应的发现和对磁存储产业的贡献[J].记录媒体技术,2008(3):54-56.
[6] Honeywell company.1-and 2-Axis Magnetic Sensors HMC1021/1022[EB/OL],(2009-9-19)[2013-4-23].http://honeywell sensor.com.2013.
[7] 邹红玉.用巨磁电阻式位置传感器测量材料的杨氏模量[J].传感器与微系统,2009,28(4):105-107.
[8] 吕 鑫,王 忠.ZigBee无线数据传输模块的设计与实现[J].安徽师范大学学报:自然科学版,2010(4):332-335.
[9] 梁子君,宋志洪.基于无线地磁的交通信号控制策略研究[J].交通信息与安全,2012(2):41-45.
猜你喜欢
科技资讯(2022年21期)2022-10-30
中学生数理化·中考版(2020年10期)2020-11-27
汽车画刊(2020年5期)2020-10-20
祝您健康·文摘版(2020年3期)2020-04-09
中学生数理化·中考版(2018年11期)2019-01-31
电子制作(2018年23期)2018-12-26
现代家长(2018年11期)2018-01-05
制造技术与机床(2017年3期)2017-06-23
通信电源技术(2016年5期)2016-03-22
实验技术与管理(2014年12期)2014-03-11
