
基于阻抗控制的空间机械臂目标捕获技术研究
2014-07-25 11:29陈欢龙邹怀武时军委
载人航天 2014年2期
陈欢龙,王 盈,邹怀武,时军委
(上海宇航系统工程研究所,上海201108)
基于阻抗控制的空间机械臂目标捕获技术研究
陈欢龙,王 盈,邹怀武,时军委
(上海宇航系统工程研究所,上海201108)
针对7自由度空间机械臂在目标捕获过程中的应用,根据机械臂末端执行器与目标适配器导向插入过程中存在接触碰撞的特点,提出一种阻抗控制方法,将机械臂末端测量的反作用力和力矩转化为位置增量,从而提高机械臂的主动柔性。并建立MATLAB/ADAMS联合仿真模型进行仿真验证,利用ADAMS的碰撞模型模拟接触捕获时的力学过程。仿真结果表明,本文提出的阻抗控制方法可以减小机械臂末端作用力和关节的驱动力矩,补偿了机械臂位置控制的误差,从而保证了机械臂对目标的捕获精度。
空间机械臂;力控制;阻抗控制;目标捕获
1 引言
空间机械臂是一个复杂的多柔性体串联系统,各个臂杆、关节在运动过程中存在相互耦合的动力学影响,由于载荷的操作任务,机械臂还存在与星体接触的运动过程。机械臂的控制技术主要解决机械臂的多体协调控制,保证空间机械臂在任务阶段的运动平稳性,接触操作的安全性和准确性。由于机械臂自由运动的定位精度有限,需引入力学反馈信号作进一步精确控制,以提高操作精度,因此力控制模式被用于机械臂的接触运动阶段,用以降低关节的力学载荷,减小关节设计难度。根据任务需求主要分为两种工况,一是末端执行器与目标适配器的接触过程,二是载荷与舱体连接口的接触过程。机械臂末端执行器对目标适配器进行抓捕时,机械臂需保持在目标适配器垂直方向上的主动力,以保证末端执行器能顺利插入适配器。
力控制主要有两种实现方式,一是力/位混合控制,二是阻抗控制[1]。Mason于1979年最早提出同时、非矛盾地控制力和位置的概念和关节柔顺的思想,其方法是对机器人的不同关节根据具体任务要求分别独立地进行力控制和位置控制,明显有一定局限性[2]。1981年Raibert和Craig在Mason的基础上提出了力/位混合控制,即通过雅可比矩阵将作业空间任意方向的力和位置分配到各个关节控制器上,可这种方法计算复杂[3]。
阻抗控制是Hogan[4]于1985年提出的,它从根本上改变了控制设计思路,解决了由于控制规律的切换所带来的不稳定问题。阻抗控制就是通过调整末端接触点位置/速度和力的关系来实现的。机器人的末端点可以呈现出一个线性阻抗关系,因为没有了控制方法之间的切换,从而使与环境的接触行为变得平滑,期望的阻抗可以通过反馈控制来得到。
为了提高机器人对环境力学的适应性,在力/位混合控制和阻抗控制的基础上,很多新型的控制方法被提出。针对力控制特点众多学者进行了自适应控制和变结构力控制尝试[5,6]。另外,一些智能控制策略如模糊和神经网络理论也被应用到智能机器人力控制中[7,8]。这些控制策略由于建模和计算复杂,稳定性难以分析,目前还无法用于空间机械臂的控制中,因此力/位混合控制和阻抗控制仍然是应用最广泛的力控制方法。
空间机械臂一方面采用谐波减速器和相对柔性的臂杆来提高机械臂的被动柔性,用于吸收接触碰撞时的瞬间作用力和力矩,另一方面采用柔顺控制进一步降低机械臂的刚度。与阻抗控制相比较,力/位置混合控制需要准确知道力/位置控制的方向以及期望的力/位置矢量。同时,这种算法没有考虑机构的动力学特性,从而会导致控制系统在某些条件下的不稳定响应[2]。本文根据机械臂末端执行器与目标适配器导向插入过程中存在接触碰撞的特点,采用阻抗控制提高其主动柔性。仿真中采用ADAMS建立机械臂末端捕获目标的接触碰撞动力学模型,并利用SIMULINK建立控制模型,通过MATLAB/ADAMS联合仿真验证控制算法的有效性。
2 机械臂阻抗控制算法及分析
2.1 阻抗控制模型
空间机械臂在末端连接处安装一个六维力/力矩传感器,用来测量适配器与环境的接触力,借助于此传感器可以实现末端在整个接触过程中的柔顺控制,本文提出的阻抗控制原理简图如图1。

图1 机械臂阻抗控制模型Fig.1 Impendence controlmodel
其中qd为关节角度指令,q为真实关节角度,J为雅克比矩阵,其广义逆为J+=JT(JJT)-1,L-1(X)为机械臂末端笛卡尔空间到关节空间的反解,Xm为笛卡尔空间期望的机械臂末端位姿,经反解并采用多项式规划后得到各时间点的期望关节角度指令θm,δθ为经过阻抗变换得到的关节角度增量。Bds+Kd是系统的期望阻抗特性,Bd和Kd是六阶对角矩阵,其每个元素分别代表x、y、z轴平动和转动的期望阻抗特性:

Fd是末端与环境接触的期望力,Fa是六维力传感器测量的六维力,δF是末端与环境基础坐标系中的六维力矩阵,T是六维力相对于机械臂的坐标变换矩阵。
2.2 算法原理分析
不考虑机械臂的柔性,同时,由于机械臂进行力控制的过程中,运动速度和运动范围较小,不考虑空间飞行器浮动基座的影响。则机械臂的动力学方程可表示为公式(1)[9]。

式中M(q)是n×n的正定对称矩阵,是机械臂的惯性矩阵,M(q)q‥为惯性力矩,C(q,q·)q·是n×1的离心力和哥式力向量,τ为关节空间的力矩向量,Fext为机械臂受到的外部作用力/力矩。
在笛卡尔空间下,机械臂的动力学可描述为公式(2)[9]。

其中F是广义操作力向量。上式描述了末端操作力和末端角速度之间的关系。并且存在公式(3)。

阻抗控制的目的是使机械臂具有质量-弹簧-阻尼特性,因此,机械臂末端操作力与环境的动态交互关系可描述为公式(4)。

将(3)式代入(4)式得到式(5)。

其中~x=x-xd。
事实上,由于加速度的信息很难精确得到,因此在实际使用中,上式进一步化简为式(6)。

把上式代入(1),得到(7)。

下面考察(7)的稳定性。定义李雅普诺夫函数为式(8)。

可把它解释为闭环系统的总能量。对上式求导得式(9)。

由于力控制过程中,机械臂的速度较小,上式中q·TC(q,q·)q·为小量,当选取B足够大时可以保证V·<0,即保证闭环系统渐进稳定。
上述分析表明,当机械臂与适配器稳定接触时,通过对末端作用力的测量和反馈,闭环系统将把机械臂导引至期望的位置xd。下面分析,当机械臂与环境接触过程的稳定性。假设由接触引起的局部形变可由矢量~xE表示。当接触时~xE=x -xE,不接触时~xE=0。假设环境与机械臂的作用力FE满足式(10)所示的胡克定律。

KE为环境刚度矩阵。
把上式代入(1)式,并令τ=-JT[B~x·+K~x],得到式(11)。

取李雅普诺夫函数为式(12)系统的总能量

显然,分析的结果与不接触或稳定接触时的情况是一样的。
3 仿真建模
机械臂动力学与控制联合仿真模型主要包括三部分:机械臂动力学模型、关节控制模块和力控制模块。其中关节控制模块和力控制模块在MATLAB/SIMULINK中计算,机械臂动力学在ADAMS中计算。
图2为ADAMS环境中建立的7自由度机械臂模型,其中目标适配器采用一个锥形柱来模拟,在锥形柱内侧和机械臂末端设置接触碰撞模型,如(14)式所示。

图2 ADAMS环境下的机械臂构型图Fig.2 Arm configuration in ADAMS

式中:q为两个对象之间实际距离;q0为触发距离,确定冲击力是否起作用,该参数应为一个实常数;k为刚度系数,取104 N/mm;e为弹性力指数,取2.2;C为阻尼系数,取10.0;d为刺入深度,取0.1 mm。
关节控制模块包含7个关节控制器,根据期望关节角度和关节当前的位置和速度计算关节控制力矩,控制模型假设了关节电流环控制的传递函数为一节惯性环节,其中τ取0.02。

4 仿真分析
本节给出MATLAB/ADAMS下的控制与动力学联合仿真结果,通过与常规位置控制相比较验证阻抗控制的效果。仿真的初始条件为:
机械臂关节的初始角度为:

机械臂末端初始位姿为:

目标适配器端点位姿为:

假设机械臂期望目标点位姿与真实的位姿存在一定的差异,该偏差量为:

4.1 不加阻抗控制的仿真结果
为了比较阻抗控制的效果,图3和图4为不加阻抗控制时机械臂末端受到的作用力和力矩,从中可以看出,末端受到的最大反作用力约为40 N,最大反作用力矩约为1.5 Nm。图5为机械臂七个关节的驱动力矩,图中表明机械臂关节的最大驱动力矩在第三个关节,约为90 Nm。

图3 末端作用力曲线Fig.3 Curve of end acting force
4.2 阻抗控制的仿真结果
取期望的机械臂末端阻抗参数为:


图4 末端作用力矩曲线Fig.4 Curve of end acting torque

图5 七个关节的驱动力矩曲线Fig.5 Curve of joint driving torque

仿真结果如图6~图10所示。从图6和图7可以看出,采用阻抗控制之后,机械臂末端受到的力和力矩分别减小到20 N和1 Nm,图8表明关节驱动力矩也从90 Nm减小到30 Nm。图9和图10表明,阻抗控制在减小机械臂末端作用力和关节驱动力矩的同时,能使机械臂末端与目标适配器的相对距离小于1 mm、相对姿态小于0.5°,从而保证了捕获精度。
5 结论
本文研究了阻抗控制在空间7自由度机械臂捕获目标过程中的应用,根据机械臂末端执行器与目标适配器导向插入过程中存在接触碰撞的特点,提出一种阻抗控制模型以提高机械臂的主动柔性。并建立MATLAB/ADAMS联合仿真模型,验证控制算法的有效性。本方法计算量较小,易于工程实现。仿真结果表明,本文提出的阻抗控制模型可以减小机械臂末端作用力和关节的驱动力矩,并使机械臂末端与目标适配器的相对距离小于1 mm、相对姿态小于0.5°,保证了机械臂对目标的捕获精度。
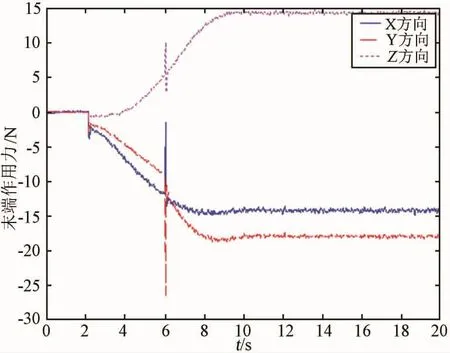
图6 末端作用力曲线Fig.6 Curve of end acting force

图7 末端作用力矩曲线Fig.7 Curve of end acting torque

图8 七个关节的驱动力矩Fig.8 Curve of joint driving torque

图9 机械臂末端与目标的相对位置曲线Fig.9 Relative position error between end of arm and target

图10 机械臂末端与目标的相对姿态曲线Fig.10 Relative attitude error between end of arm and target
[1] 蒋再男,刘宏,黄剑斌,等.基于阻抗内环的新型力外环控制策略[J].航空学报.2009,8,30(8):1515-1520.
[2] 朱阳光.基于力信息的机器人主动柔顺装配研究[D].南京:南京理工大学,2003
[3] John J C.Introduction to robotics:mechanics and control[J].Addison-Wesley Publishing Company,Inc.,Reading,MA,1989:211-215.
[4] Hogan N.Impedance control:An approach tomanipulation:Part I-theory,Part II-Implementation,Part III-APPleation[J].Journal of Dynamic Systems,Measurement,and Control,1985,107(1):l-24.
[5] Craig JJ,Hsu P,Sastry SS.Adaptive control ofmechanical manipulators[J].The International Journal of Robotics Research,1987,6(2):16-28.
[6] Jianbin H,Zongwu X,Minghe J,etal.Adaptive impedancecontrolled manipulator based on collision detection[J].Chinese Journal of Aeronautics,2009,22(1):105-112.
[7] 殷跃红,朱剑英.智能机器力觉及力控制研究综述[J].航空学报.1999,20(3):1-7.
[8] 王宪伦.不确定环境下机器人柔顺控制及可视化仿真的研究[D].济南:山东大学,2006.
[9] 熊有伦.机器人技术基础[M].武汉:华中科技大学出版社,1996:83-85.
Study on Im pendence Control Based Target Capture Technology of Space Robotic Arm
CHEN Huanlong,WANG Ying,ZOU Huaiwu,SHIJunwei
(Shanghai Institute of Aerospace System Engineering,Shanghai201108,China)
For the target capture of a 7-DoF Space Robotic Arm,based on the feature of contacting and impacting between the End Effector and the Target Adapter,a method of impendence control was proposed to improve the active flexible of the arm.To verify themethod,a combined simulation model was created using MATLAB/ADAMS,which could simulate the force process accurately.The results showed that the impendence controlmethod proposed in this paper could decrease the end acting force and joint driving torque in contacting process,thus the Arm position control error was compensated and the target capturing precision assured。
space robotic arm;force control;impendence control;target capture
TP242.3;V423.7
A
1674-5825(2014)02-0122-05
2014-01-24;
2014-03-27
上海市科学技术委员会资助项目(06DZ22105)
陈欢龙(1982-),博士,高级工程师,研究方向为航天器及空间机构控制与仿真技术。E-mail:chenhuanlong@163.com
猜你喜欢
内燃机与配件(2022年19期)2022-12-02
液压与气动(2022年10期)2022-11-27
汽车实用技术(2022年15期)2022-08-19
汽车维修技师(2019年2期)2019-08-23
科学与财富(2017年24期)2017-09-06
舰船科学技术(2017年5期)2017-06-19
电脑爱好者(2016年22期)2016-12-16
中学生数理化·高三版(2016年2期)2016-09-10
中学生数理化·高二版(2016年6期)2016-05-14
科学中国人(2016年35期)2016-01-28
