
基于摩擦补偿的空间机械臂关节高精度控制研究
2014-07-25 11:29张晓东贾山刚
载人航天 2014年2期
张晓东,刘 鑫,贾山刚
(1.中国空间技术研究院总体部,北京100094;2.北京航天飞行控制中心,北京100094)
·工程技术·
基于摩擦补偿的空间机械臂关节高精度控制研究
张晓东1,刘 鑫1,贾山刚2
(1.中国空间技术研究院总体部,北京100094;2.北京航天飞行控制中心,北京100094)
空间机械臂关节具有大惯量、高精度的特点,针对空间机械臂关节低速、高精度控制要求,提出一种基于摩擦补偿的双位置闭环控制策略。建立了考虑摩擦和惯量变化等因素的一体化关节动力学模型,分析了全位置闭环系统的稳定性,在此基础上提出了一种基于双位置传感器信息的闭环伺服控制策略,并引入自适应率辨识未知摩擦和惯量变化,利用Lyapunov函数证明闭环系统的稳定性和跟踪误差的渐进收敛性。在测试平台上的试验结果表明,提出的空间机械臂一体化关节伺服控制策略能够有效地提高关节伺服控制精度和系统鲁棒性。
机械臂关节;摩擦补偿;参数自适应;伺服控制
1 引言
空间机械臂的运动是通过各个机械臂关节的组合运动来实现的,因此,空间机械臂关节及其伺服控制系统性能是空间机械臂完成各种高精度作业任务的前提和基础。但在实际的系统中,关节传动系统中存在的大惯量和非线性摩擦会导致较大的稳态误差和极限环振荡等不良后果,是影响空间机械臂关节高精度位置控制的重要因素,如忽略大惯量和摩擦非线性的影响,机械臂执行高精度任务的能力和稳定性将会受到很大的限制。
摩擦非线性会导致严重的稳态定位误差,大大降低了系统的稳定性,引入积分的高增益PD控制虽然可以减小静差,但存在容易激发极限环振荡、增大传感器噪声的问题[1]。许多研究者将此类非线性因素视为外部干扰的一部分,提出基于干扰观测器的鲁棒控制、变结构等非线性控制方法[2],但该方法难以描述摩擦动态特性,对低速时摩擦补偿能力有限。当前,基于摩擦模型的补偿方法是消除摩擦的最为有效的方法[3]。但在实际的空间环境中,模型参数会随着外界条件诸如温度变化、润滑条件、机械磨损和惯量变化等因素而变化[4],由于其参数的时变特性,参数离线辨识的方法难以取得较高精度。
本文提出自适应摩擦补偿的双位置闭环控制策略方法,设计了具有电机轴位置反馈和驱动组件输出轴位置反馈的双闭环伺服控制系统,实现机械臂关节位置全闭环控制,在此基础上,设计自适应率估计关节惯量和非线性摩擦,并分析了自适应控制的稳定性和渐进收敛性。最后在机械臂关节测试平台上进行了试验,试验表明,在关节非线性因素的影响下,本文提出的控制策略可显著提高机械臂关节控制系统的精度,具有实际的应用价值。
2 关节动力学建模
对于位置跟踪系统,摩擦环节对系统的不良影响主要表现为:低速爬行现象(stick-slip运动)和速度过零时的波形畸变。所谓的“爬行现象”一般发生在低速情况下,是指当位置输入为斜坡信号(速度为常值)时,系统出现静→动→静→动的爬行运动,产生低速爬行的原因是由于系统由静止到运动的转变过程中,摩擦力的变化具有负斜率特性;在零速时,由于存在静摩擦,且其变化具有多值性和不连续性,导致系统在速度过零时出现运动不平稳现象,并且在速度过零点时,波形出现“平顶”现象[4]。
考虑上述一体化关节非线性因素,将一体化关节的柔性变形等效为线性扭转弹簧,建立包括输出轴转动惯量、电机轴转动惯量、非线性摩擦和粘滞阻尼的一体化关节级联动力学方程如式(1)(2)所示:
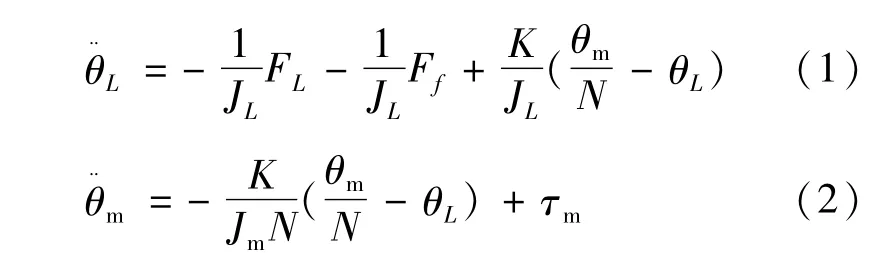
其中,JL为一体化关节输出轴转动惯量;
Jm为电机转子惯量;
θL为一体化关节输出轴角位移;
θm为电机转子角位移;
τm为电机输出力矩;
FL为负载力矩;
Ff为摩擦力矩;
K为一体化关节刚度系数;
N为谐波减速器减速比。
3 关节高精度控制系统设计
3.1 双位置闭环伺服控制系统设计
空间机械臂关节伺服控制系统是一个位置随动系统,即实时地跟踪上位机下发的位置控制指令[5]。为克服机械臂关节非线性因素的影响,提高关节伺服控制系统稳定性,本文设计双位置闭环伺服控制器提高机械臂关节位置控制精度,图1为机械臂单关节的伺服控制结构框图,关节控制器采用基本的PID控制策略,PID控制器输出经过陷波滤波器后,作为电机驱动器的参考力矩。
关节电机轴位置反馈响应快,可构成高频段的闭环;关节输出轴传感器直接测量关节输出轴的位置,传动装置的非线性并不能影响它的精度,但由于关节输出通过柔性传动与关节电机轴相连,关节输出轴传感器不会立即对电机轴位置的改变产生反应,电机轴旋转与关节输出轴之间的时间滞后导致关节输出轴传感器不能构成快速的闭环回路。因此,考虑到关节位置精度的重要性,采用高精度位置传感器安装于关节输出轴,测量关节输出的绝对位置信息,而将关节电机轴位置传感器测量的电机位置信息,微分后求取电机转速,连接到PID控制器的速度反馈回路,从而构成双位置闭环伺服控制系统。
机械臂关节伺服系统位置反馈一般包括电机轴位置反馈和关节输出轴位置反馈。为了提高关节输出精度,一般将位置传感器直接安装于关节输出端的位置,以消除传动系统不精确的影响,从而构成全位置闭环伺服控制系统,但对于存在关节非线性的伺服控制系统,关节输出端位置反馈难以保证控制系统稳定性,分析过程如下:
具有关节柔性的闭环伺服控制系统简化结构如图2所示,其中,输入为电机输入转矩,输出分别为关节电机轴位置和关节输出轴位置,K为关节刚度,KC为粘性阻尼。
根据图2所示框图,可导出矩阵方程如式(3)所示。
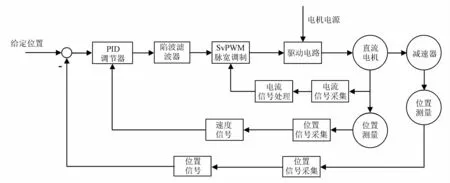
图1 关节双位置闭环伺服控制结构框图Fig.1 Servo control system structure of joint double position close-loop
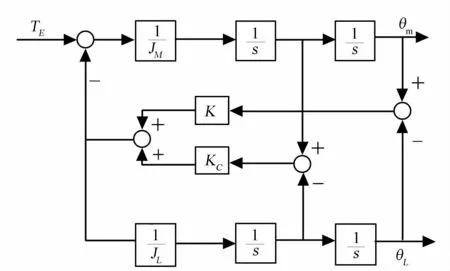
图2 关节闭环伺服控制系统结构Fig.2 Close-loop Servo control system structure of joint
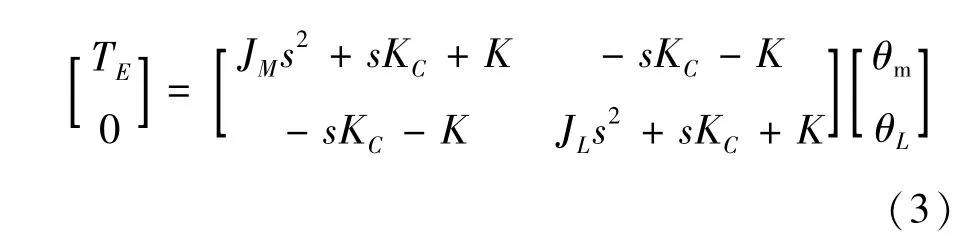
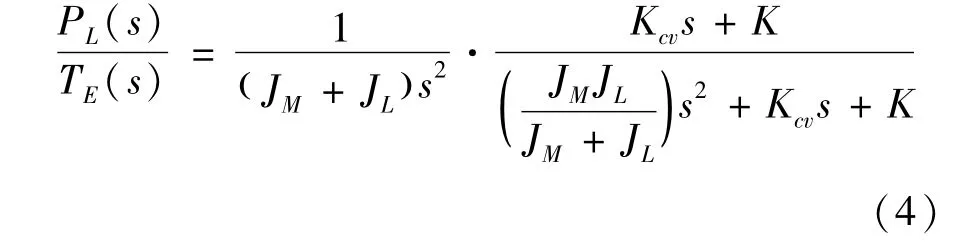
将位置传感器安装于关节输出轴位置的全闭环控制系统,电机转矩到关节输出轴位置的传递函数如式(4)所示。
将位置传感器安装于电机轴位置的半闭环控制系统,电机转矩到电机输出轴位置的传递函数如式(5)所示。
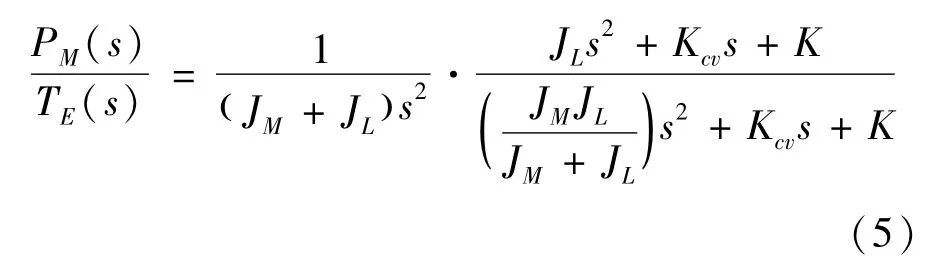
式(4)与式(5)相比,分子中没有s2项,导致在高频段减少90°的相位滞后,因此,单纯依赖于关节输出轴位置反馈的高精度稳定控制系统是难以实现的。
3.2 关节的伺服控制策略

其中,λ为一正常数,且λ>0。

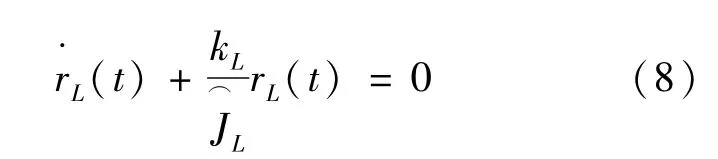
既然kL>0,当t→∞时,误差rL将趋近于零,因此,整个控制系统将是稳定的。上式中假定式(7)中的均为精确值,但在实际的系统中,是未知的,因此设计控制系统的自适应率来消除不确定因素的影响。
参数自适应控制设计的目的为:在惯量变化、负载变化等不确定因素的影响下,仍使关节位置偏差r趋近于零。在实际系统中,参数通
L
常具有未知性和不确定性,因此本文根据输出位置误差设计参数自适应率如式(9)(10)。
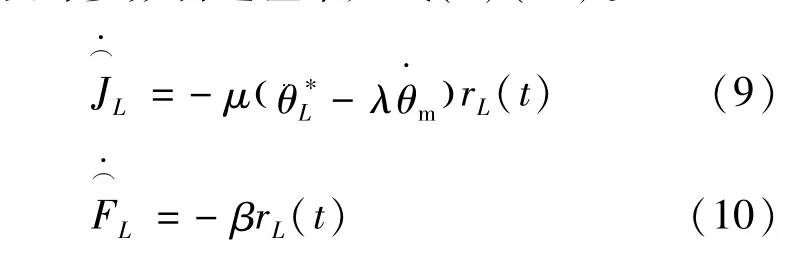
其中,μ,β均为正的自适应率增益常数。
3.3 自适应控制系统稳定性分析
为了验证具有自适应率的双状态观测器的稳定性,设计Lyapunov函数如式(11)所示。

则Lyapunov函数的一阶导数可表示为式(12)所示形式。
根据控制率(7),且将参数自适应率式(9)、(10)代入(12)式,可得如式(13)。



则rL(t)渐进趋近于零,可得位置控制偏差e(t)和速度偏差·e(t)也渐进趋近于零。
4 关节位置控制试验验证
试验加载设备采用吊装砝码产生加载力矩的方式,试验工装如图3所示。
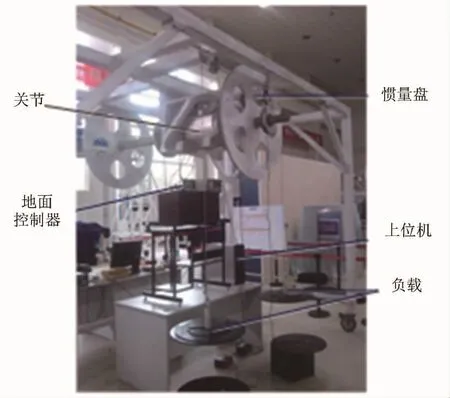
图3 关节控制试验装置Fig.3 Joint control experiment system
该工装将关节与惯量盘连接,惯量盘两端加砝码可以调节关节的负载。
将规划的关节速度转换为相应的电机速度,转化方法为用关节速度乘减速比得到,分别进行空载、140 Nm负载、285 Nm负载情况下的速度跟踪试验,试验效果如图4所示。由图可见,关节电机可以很好的跟踪电机输入速度,并且在加载情况下,速度波动影响较小。
关节位置轨迹跟踪试验如图5所示,分别进行空载、140 Nm负载、285 Nm负载情况下的位置跟踪试验。通过试验过程数据及分析,得到如下结果:
1)关节位置的跟踪效果较好,关节位置跟踪可快速响应关节期望位置;
2)关节停止运行时,关节位置波动较小,波动范围小于±20″,关节停止运动后,稳态误差在1.7'以内;
3)随着负载的变化,关节的位置跟踪没有出现变化,不会因为负载的变大导致响应变慢和稳态误差增大,表明在关节的工作范围内具有较好特性。
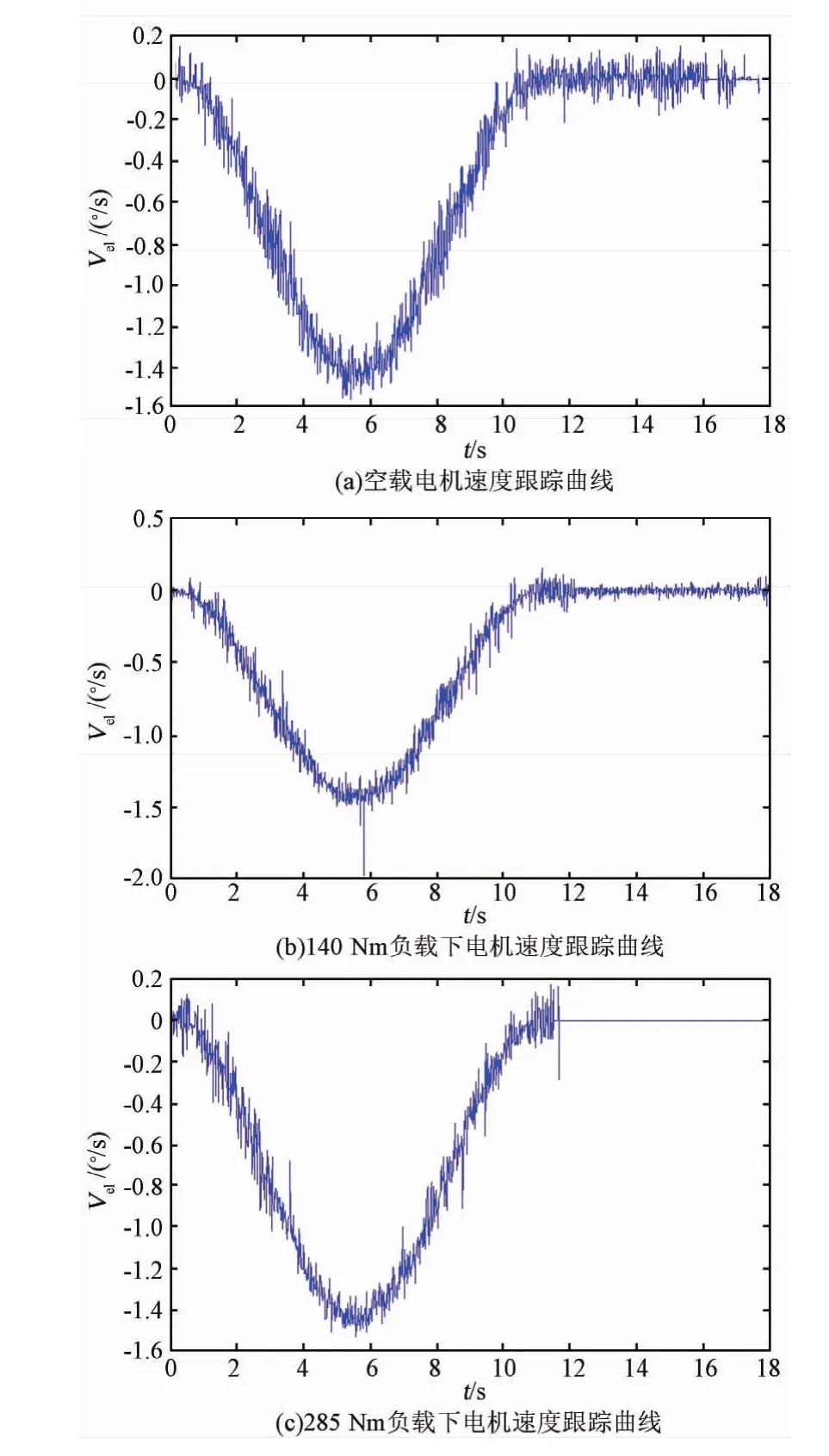
图4 关节速度跟踪试验结果Fig.4 Joint velocity control experiment system
5 结论
由关节定位精度测试结果可知:
1)所提出的空间机械臂关节双位置伺服控制系统具有很高的稳态控制精度;
2)提出的关节高精度位置控制策略稳定且渐进收敛;
3)参数自适应率可有效的估计惯量和摩擦不确定性,同传统的全位置闭环控制策略相比,可显著提高定位控制精度和鲁棒性。
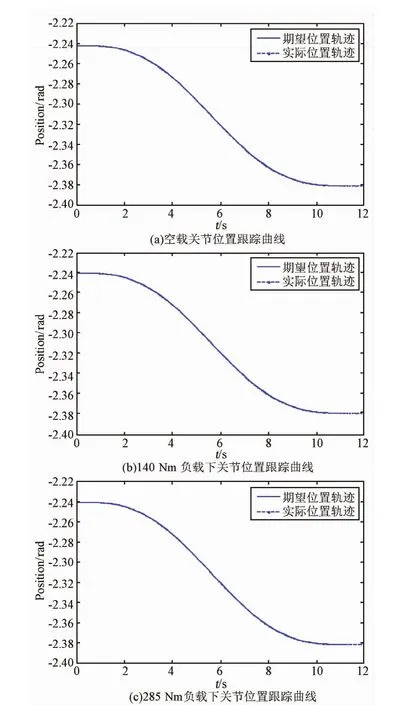
图5 关节位置跟踪试验结果Fig.5 Joint position control experiment system
[1] 张晓东,孙汉旭,贾庆轩,等.机器人模块化关节模糊自适应伺服控制系统[J].北京邮电大学学报,2007,30(5):37-40.
[2] Iwasaki M,Shibate T.Disturbance-observer-based nonlinear friction compensation in table drive system[J].IEEE/ASME Transaction on mechatronics,1999,4(1):3-8.
[3] 张晓东,孙汉旭,贾庆轩,等.空间机器人柔性关节的轨迹控制研究[J].宇航学报,2008,29(6):1865-1870.
[4] 张晓东,张东华.有摩擦补偿的驱动组件高精度位置控制研究[J].航天器工程,2010(3):45-51.
[5] 宋申民,宋卓异,陈兴林,等.卫星光通信粗瞄系统非线性摩擦的神经网络补偿[J].航空学报,2007,28(2):358-364.
[6] Tan Y,Chang J,Tan H.Adaptive friction compensation for induction motors with inertia and load uncertainties[C]//A-merican Control Conference,2000.Proceedings of the 2000. IEEE,2000,1(6):615-620.
Study on High Precision Position Control of Space Robotic Arm Joints Based on Friction Com pensation
ZHANG Xiaodong1,LIU Xin1,JIA Shangang2
(1.Institute of Spacecraft System Engineering,China Academy of Space Technology,Beijing 100094,China;2.Beijing Aerospace Control Center,Beijing 100094,China)
An adaptive high precision position controlwith friction compensation and double-position sensor scheme for Space robotic arm jointwas presented.A robotic arm jointwasmodeled as a cascade dynamics system and friction modelwith nonuniform friction variationswas used to characterize the friction force.The stability of double-position sensor close-loop control system was analyzed and nonlinear adaptive control lawswere designed to identify the unknown friction,inertia and the external disturbances.The system stability and asymptotic trajectory tracking performance were guaranteed by Lyapunov function and demonstrated by the experimental results.
manipulator joint;friction compensation;parameter adaptive;servo control
V423.7
A
1674-5825(2014)02-0099-05
2014-01-06;
2014-02-28
张晓东(1980-),男,博士,高级工程师,研究方向为空间机器人技术。E-mail:15810002976@139.com
猜你喜欢
军民两用技术与产品(2022年3期)2022-06-05
工程与试验(2022年1期)2022-05-31
现代电力(2022年2期)2022-05-23
物流科技(2022年2期)2022-05-07
中华养生保健(2020年3期)2020-11-16
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
汽车工程(2019年4期)2019-05-07
电子制作(2018年17期)2018-09-28
智富时代(2018年8期)2018-09-28
