
机床机械手结构设计与仿真
2014-09-21 06:08金林根刘志虎林鹏雄方向华
重庆文理学院学报(社会科学版) 2014年5期
王 雷,金林根,刘志虎,林鹏雄,方向华
(1.安徽工程大学机械与汽车工程学院,安徽 芜湖 241000;2.吴江博众精工科技有限公司,江苏 吴江 215028;3.芜湖博耐尔汽车电气系统有限公司,安徽 芜湖 241000)
工业机械手是在自动化生产过程中使用的一种模仿人体上肢的部分功能,按照预定要求具有抓取和移动工件功能的自动化装置,它是在机械化、自动化生产过程中发展起来的一种新型装置.实践证明,工业机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,改善劳动条件,提高劳动生产率和自动化水平.因此,机械手在机械行业中得到了越来越广泛的研究和应用[1-7].因此,对机械手的相关结构设计及控制的研究具有重要的意义.本文设计的液压驱动机床机械手主要与数控车床(加工中心、数控铣床等)组合成自动化生产线,实现加工过程(上料、加工、下料)的自动化、无人化.
1 机械手结构方案设计
1.1 机械手技术参数
1)设计技术参数
a)抓重:5 kg;b)自由度数:2;c)工件最大半径:80 mm;d)手臂夹持工件时的最大长度:529 mm.
2)手臂运动参数
a)夹紧行程:27 mm,夹紧速度:0.054 m/s;b)伸缩行程:60 mm,伸缩速度:0.06 m/s;c)旋转范围:0°~90°,旋转速度:45°/s;d)手指夹持范围:60~80 mm;e)缓冲方式:液压缓冲;f)驱动方式:液压驱动;g)控制方式:PLC程序控制.
1.2 方案1的确定
采用连杆杠杆式手部,直接夹持部分采用夹钳式,由液压缸驱动T形杆的伸缩使手指张开和闭合,实现放松和夹紧,之后由另一个液压缸驱动摆动套筒使整个机械手在竖直平面内旋转,实现工件的上下料.此机械手具有一个自由度,为工件在竖直平面内的旋转.方案1的结构如图1所示.

图1 机械手方案1
1.3 方案2的确定
此机械手具有两个自由度,分别为工件的水平伸缩和在竖直平面内的旋转.它采用的是夹钳式手部.与方案1一样,手指由第1个液压缸(灰色的液压缸)液压缸驱动,使其张开和闭合,实现放松和夹紧.工件的伸缩由第2个液压缸(紫色的液压缸)驱动手臂伸缩实现.工件在竖直平面内的旋转由第3个液压缸(黄色的液压缸)实现,黑色的为基座.方案2的结构如图2所示.
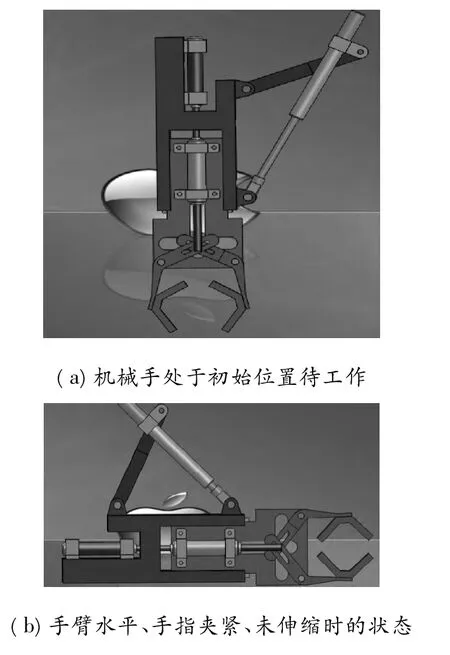
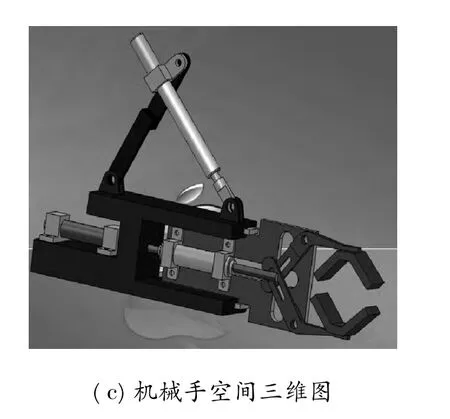
图2 机械手方案2
1.4 方案的选择
比较以上两方案可知方案1存在以下不足:1)结构不紧凑,所需空间大;2)连杆的受力分析困难;3)旋转套筒所受扭矩大,对材料要求高;4)对手臂的刚度要求高;5)效率相对方案2较低.所以方案2为最佳选择.
2 机械手机械结构设计
2.1 机械手机械结构的设计与计算
2.1.1 手部结构设计
手部是机械手直接抓取和紧握工件的部件,它具有模仿人手的功能,并安装于机械手手臂的前端.机械手的结构形式不像人手,它的手指没有形状,只有自身的运动将工件抓住,因此手部结构形式必须根据它的使用场合和被夹紧工件的形状、尺寸、重量、材质以及抓取部位的不同而设计相应的结构.
本次设计中所夹持的工件形状为圆柱形,因此采用夹钳式手指.它对抓取各种形状的工件具有较大的适应性,可以抓取轴、盘、套类零件,并可自动定心[9].一般情况下,夹钳式手部多采用两个手指.手指尾部采用滑槽杠杆式传力机构,其主要原因在于,在对手部进行受力分析时较其他形式的传力机构简单.当滑槽内的销钉沿直线运动时,手指可绕转动副回转实现夹紧和放松.手部结构如图3和图4所示.
2.1.2 手部夹紧力计算
手部夹紧力FN可按下式进行计算:

(1)式中,k1为安全系数,由机械手的工艺及设计要求确定,通常取1.2~2.0,这里取1.5;k2为动载系数,主要考虑惯性力的影响,k2=1+a/g.a为运载工件时重力方向的最大上升加速度,g为重力加速度;k3为方位系数,手指竖直,工件水平放置时,取0.9~1.1;G为被夹持工件所受重力.
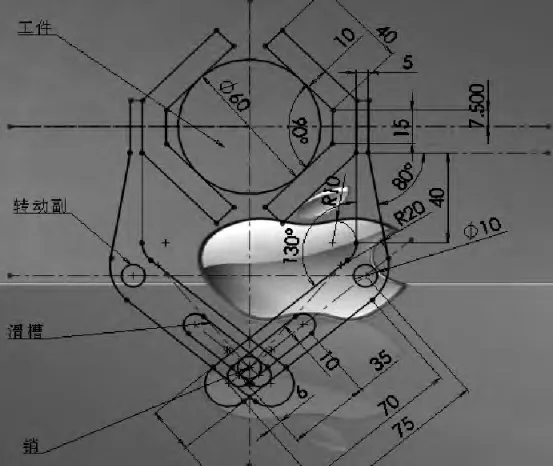
图3 手部结构平面图
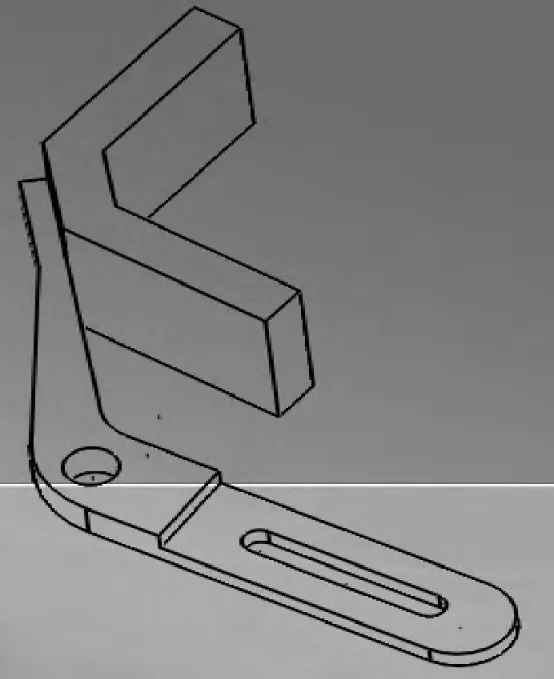
图4 手部结构三维图
经代入相关参数计算得:

2.1.3 手指驱动力的计算
图3为手指夹持工件时的示意图.如图5所示,先由手指受力分析图得出手指驱动力和手指夹紧力之间的关系.
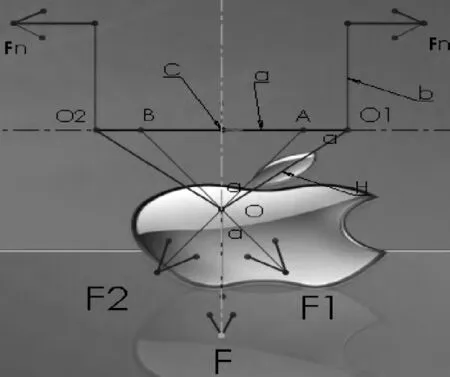
图5 手指夹持工件时的受力分析图
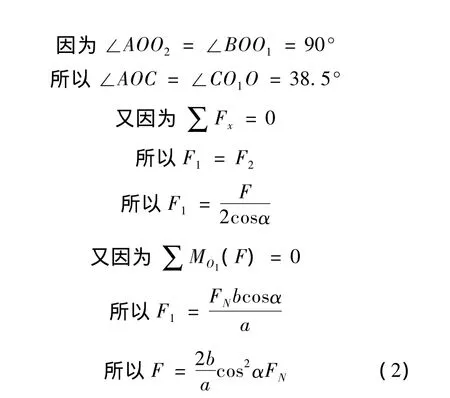
(2)式中,a为手指的回转支点到对称中心线的距离(mm);α为工件被夹紧时手指的滑槽方向与两回转支点连线间的夹角.F为第一液压缸所受的负载.
将FN代入(2)式得:

当驱动力F一定时,α角增大,则握力FN也随之增加,但α角过大会导致拉杆的行程过大,以及手指滑槽尺寸长度增大,使结构加大,因此建议 α 取30°~ 40°.在本次设计中,α =38.5°,取值合理.
考虑手爪的机械效率,取η=0.95,所以实际负载为

2.2 机械手臂部的设计及实现
机械手臂部是机械手的主要握持部件.它的作用是支承手部(包括工件)、滑块及液压缸,并带动它们在空间运动.当手臂旋转时改变工件在竖直平面内的方位;当手臂伸缩时改变工件在竖直平面或水平面内的方位.手臂在工作中既直接承受手部、工件及液压缸的动、静载荷,而且自身运动又较多,故其受力复杂.因而,它的结构、工作范围、灵活性以及抓重大小和定位精度等直接影响机械手的工作性能.
为提高刚度,应尽可能缩短臂杆的悬伸长度.在本次设计中为了增加臂部的刚度,在臂部设计了两个吊耳,如图6所示,由驱动手臂旋转的液压缸活塞杆支承.此活塞杆既可驱动手臂旋转,又增加了臂部的刚性,一举两得.
为实现工件的伸缩运动,设置滑块在手臂内滑动,手指安装在滑块上的方式,如图2(b)所示.蓝色的是机械手臂,绿色的是滑块.滑块由图2(b)中的紫色液压缸驱动再通过活塞杆驱动使其运动.手臂和滑块的结构分别如图7和图8所示.
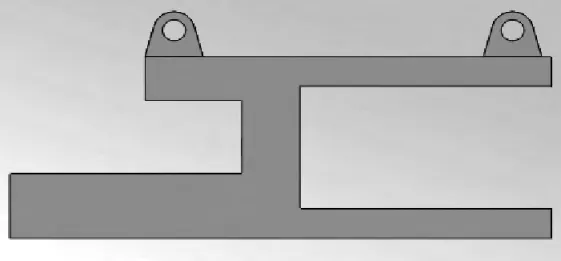
图6 手臂结构
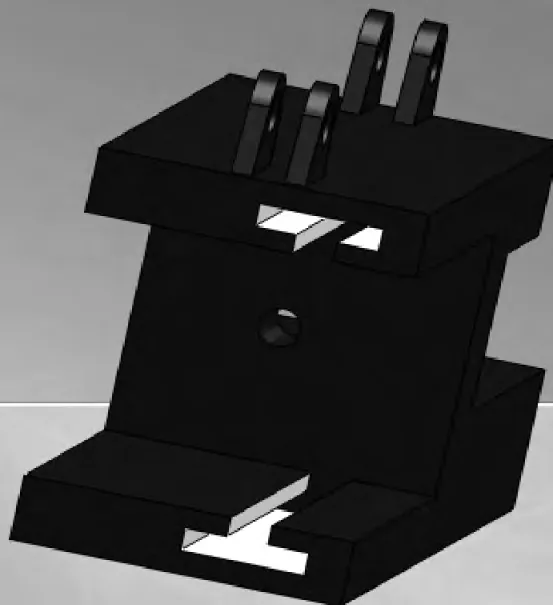
图7 手臂结构
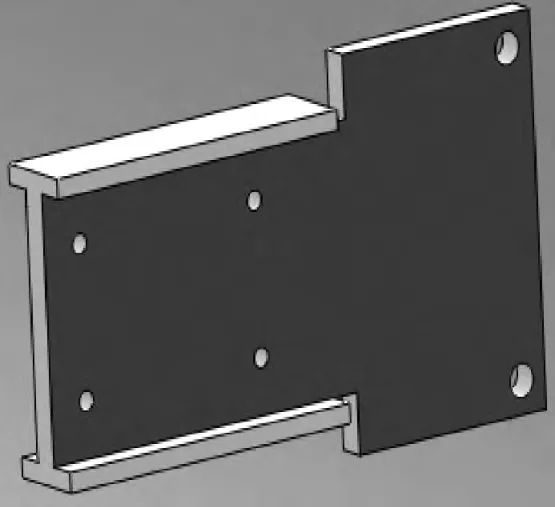
图8 滑块结构
3 机械手液压系统设计与实现
机械手的伸缩、摆动和手指的夹紧松开均由液压缸来实现.本文设计的机械手所满足的功能为:手臂的下降——手指的夹紧——手臂的上升——手臂的上摆——手臂的伸长——手指的放松——手臂的缩回——加工等待——手臂伸长——手 指 夹 紧——手 臂 缩 回——手 臂 下摆——手指放松.其动作流程如图9所示.
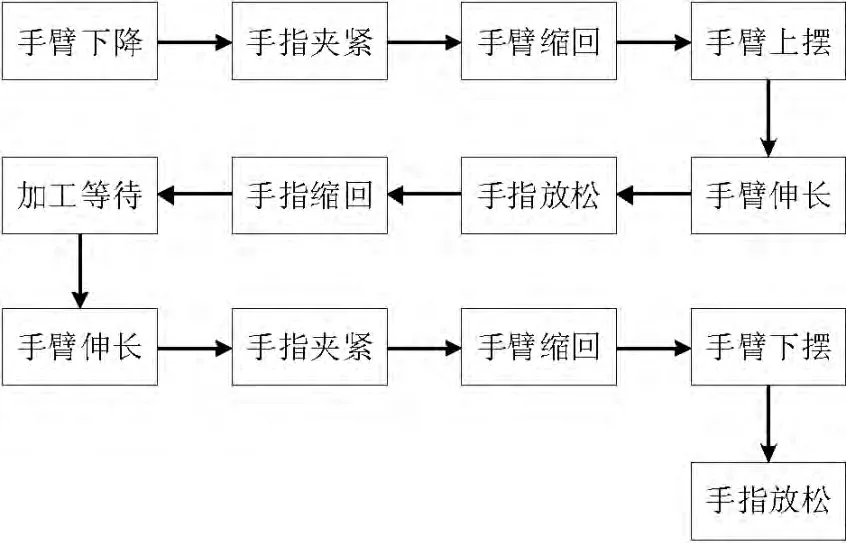
图9 机械手的动作流程
3.1 液压缸的设计
以手指夹紧液压缸的设计为例进行计算.
先对液压缸内径进行计算.要计算液压缸的内径,则必须先知道液压缸的驱动力,及工作压力p1.
设液压缸驱动力为F驱,液压缸所受负载F由前面计算得F=140 N.
根据液压缸运动时所受负载、背压、惯性力及密封处的摩擦力等几个方面的阻力来计算液压缸的驱动力F驱.
F驱的计算公式如下[10]:

(3)式中,F密为总驱动力的0.03倍;F惯为手指的惯性力很小,可省略;F回为回油压力,可忽略;F负载=F=140 N.所以有

液压缸效率的计算:

(4)式中,η为液压缸总效率;ηm为液压缸机械效率,一般取0.85~0.95;ηv为液压缸容积效率,近似等于1;ηd为液压缸作用力效率,近似等于1.
所以有:

则实际驱动力:

由F=152 N<5 000 N,所以取工作压力p=0.8 MP.
液压缸内径D1计算公式为

(5)式中,d1为活塞杆的直径,一般取液压缸内径D1的0.5~1倍.
把上述计算的值代入(5)式并参考相关资料取整得到:D1=20 mm,d1=10 mm.
另外是夹紧液压缸行程的确定.夹紧液压缸的行程即为手指夹紧和放松时的位移.根据计算结果并合理选取可得到第一液压缸活塞行程S1=28 mm,夹紧液压缸缸筒长度L1=95 mm,及活塞杆长度l1=120 mm.为方便加工制造,取壁厚δ1=2 mm,则液压缸外径D1'=D1+2δ1=24 mm.
同理,可以求得手臂伸缩液压缸的设计尺寸为:D2=20 mm,活塞杆直径d2=0.5D2=10 mm,取壁厚δ2=2 mm,则外径D2'=D2+2δ2=24 mm.伸缩液压缸缸筒长度L2=100 mm,活塞杆长度l2=143 mm.
手臂摆动液压缸的设计尺寸为:D3=32 mm,则活塞杆直径d=16 mm.取壁厚δ3=2 mm,则外径 D3'=D3+2δ3=36 mm.摆动缸缸筒长度L3=185 mm,活塞杆长l3=181 mm.并对各个活塞杆的强度进行校核,均满足要求.
3.2 液压系统仿真建模
利用FluidSim软件建立实现本机床机械手动作的液压系统原理,如图10所示.

图10 液压系统原理图
当机械手处于初始位置时,各液压缸的状态如图10所示.当机械手下降时,3YA接通,伸缩液压缸活塞杆伸出;当手指夹紧时6YA接通,手指夹紧液压缸回缩;当手臂缩回时,4YA接通,伸缩液压缸活塞杆缩回;当手臂向上摆动时,1YA接通,摆动液压缸的活塞杆缩回;当手臂水平伸长时,4YA接通;当机械手水平,手指放松时5YA接通;当手臂向下摆动时,2YA接通,摆动液压缸的活塞杆伸出.调节系统中的调速阀或者节流阀均可以调节液压缸的运动速度,通过液压系统仿真可以直观地看出这一结果,说明设计结果的正确性和可行性.
4 结论
本文设计了一种液压驱动的机床机械手,分析比较了两种设计方案并选择较为合理的一种.在此基础上,通过详细分析与计算,完成了该机械手的结构设计,并利用Solidworks软件建立了该机床机械手的三维模型.最后,利用FluidSim软件建立实现所设计机床机械手动作的液压系统原理.通过仿真模拟应用这种机床自动上料机械手的功能,可以缩短产品的加工时间,提高劳动生产率.因此,这对实际的生产应用具有一定的参考价值.
[1]龚青山,常治斌,任爱华,等.立式轴承压装机上料机械手设计[J].湖北工业大学学报,2010,25(4):86-88.
[2]何芹,原政军,姚龙元.用于方形物件装卸液压机械手的设计[J]. 机床与液压,2010,38(18):38-40.
[3]付铁,李金泉,陈恳,等.一种新型高速码垛机械手的设计与实现[J].北京理工大学学报,2007,27(1):17-20.
[4]李佳宁,易建强,赵冬斌,等.一种全方位移动机械手的体系结构设计与分析[J].机器人,2004,26(3):272-276.
[5]Yavuz H,Bradshaw A.A new conceptual approach to the design of hybrid control architecture for autonomous mobile robots[J].Journal of Intelligent and Robotics Systems,2002,34(1):1-26.
[6]Hassan H,Simo J,Crespo A.Flexible real-time mobile robot architecture based on behavioral models[J].Engineering Application of Artificial Intelligence,2001,14(5):685-702.
[7]赵碧,巴鹏,徐英凤.气动上下料机械手手部结构的设计与分析[J].沈阳理工大学学报,2006,25(6):58-60.
[8]严绪东,关浩.一种仿人机器人头部的机械结构设计与动态仿真[J]. 机电工程,2011,28(9):11-20.
[9]李敬.机械设计基础[M].北京:电子工业出版社,2011.
[10]王益群,殿荣.液压工程师技术手册[M].北京:化学工业出版社,2009.
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
沈阳理工大学学报(2022年3期)2022-08-11
制造技术与机床(2018年11期)2018-11-23
河北农机(2017年12期)2018-01-20
制造技术与机床(2017年4期)2017-06-22
童话世界(2017年11期)2017-05-17
流体机械(2017年9期)2017-02-06
通信电源技术(2016年1期)2016-04-16
中华皮肤科杂志(2014年4期)2014-12-19
中国药业(2014年21期)2014-05-26
