基于T-S型模糊神经网络的空间结构GMM作动器主动控制
2016-01-28 03:06王社良代建波
振动与冲击 2015年24期
杨 涛, 王社良, 代建波
(1.西安建筑科技大学 土木工程学院,西安 710055;2.西安石油大学 机械工程学院,西安 710065)
基于T-S型模糊神经网络的空间结构GMM作动器主动控制
杨涛1, 王社良1, 代建波2
(1.西安建筑科技大学 土木工程学院,西安710055;2.西安石油大学 机械工程学院,西安710065)
智能控制技术是能够模仿人的智能行为的一种控制技术,它在应用中不需要建立基于系统动态特性的数学模型,从而为结构工程上解决非线性、时变、强耦合和不确定性等复杂的控制问题提供了新的途径。近年来国内外学者通过模糊控制和神经网络方法对土木工程中的振动控制进行了一些研究。Houssein等[1]利用模糊控制器对复合结构进行了控制,Fujitani等[2]进行了结构地震响应模糊控制的数值模拟分析和振动台试验;Pourzeynali等[3]应用模糊逻辑设计了高层结构的ATMD控制方案;Ghaboussi等[4]提出了神经网络识别-控制器方案,并用来预测结构的动力反应;欧进萍等[5]采用磁流变阻尼控制装置,对结构振动进行了模糊建模和模糊控制规则的提取,并进行了模糊控制的1∶10导管架式海洋平台结构模型地震模拟振动台试验,效果良好。模糊控制易于获得由语言表达的专家知识,能有效的控制难以建立精确模型而凭经验可控制的系统,而神经网络能够映射任意函数关系[6],具有并行处理和自学习能力,二者结合可以改善模糊控制中隶属度函数和模糊规则生成及调整过程中不完善和局限性问题,形成集学习、联系、识别、自适应及模糊信息处理于一体的模糊神经网络控制系统( Fuzzy Neural Network, FNN)。
超磁致伸缩材料(Giant Magnetostrictive Material,GMM)是一种智能材料,它在外加激励磁场作用下,可高效地实现机械能与电磁能之间的转换[7]。应用GMM制造的作动器具有响应速度快、磁机转化效率高等优点。Braghin等[8]研究了低频下的GMM作动器,提出了线性理论模型,并通过试验对模型进行了验证;Ohmate等[9]设计了三连杆臂型半主动振动控制装置,可在3个直线或转动方向产生可控的摩擦力和摩擦力矩,能够抑制由于地震、强风等产生的振动。李琳等[10]从力学和磁学两方面分析了GMM作动器内部结构形式对作动器特性的影响;徐峰等[11]制作了低频动态特性好,谐频影响小的主动振动控制GMM作动器;顾仲权等[12]系统研究了GMM作动器在振动主动控制中的应用。史霄等[13]利用GMM致动器建立了多自由度隔震系统。
本文主要针对自主研发的GMM作动器的控制特性,应用T-S型模糊神经网络设计了主动控制系统,实现空间结构的主动控制,并对受控的空间结构模型进行地震响应的数值仿真分析,同时与标准型的模糊神经网络的控制结果进行对比。
1GMM作动器性能简介及状态方程
1.1GMM作动器的设计

图1 GMM作动器结构示意图及实物图Fig.1 GMM actuator structure schematic and real object
GMM元件在磁场的作用下发生形变从而对外输出作动力与位移[14-15]。根据GMM材料特性,本文自主研发了GMM主动控制作动器,构造示意图如图1所示。GMM作动器包括GMM元件、外套筒、线圈骨架、偏置线圈、激励线圈、探测线圈、作动杆和预压碟簧等。磁场由励磁绕组提供,大小由输入励磁绕组的电流进行控制。为提高其工作效率,设计了由高导磁率外套筒和GMM元件构成的闭合磁路,将磁通限制在外套筒之中,降低作动器的漏磁;通过预压碟簧对GMM元件提供预压力,提高作动器输出量;作动杆端部设计为“弧形铰”传力装置,减小由于制造装配误差及外部作用的横向弯曲载荷等因素产生的弯矩;作动器两端做成螺纹,方便连接。当激励线圈通以电流信号时产生磁场,GMM元件发生变形,且变形效应通过作动杆输出给被控对象,切断电流信号磁场消失,变形恢复,磁场的变化可高频率重复进行,重复此过程,即可实现对结构的主动抗震控制。
1.2GMM作动器性能试验
在实验室对GMM作动器进行力学性能测试,将直流稳压电源与作动器连接,为其提供0~3A稳压驱动电流。通电后由线圈产生的磁场驱动GMM变形,利用碟簧为GMM元件提供预压力。试验测试了不同预压力下,电流与GMM作动器输出控制力和位移的大小关系,如图2、图3所示。

图2 GMM作动器控制力输出测试Fig.2 GMM actuator output power tests

图3 GMM作动器位移输出测试Fig.3 GMM actuator output displacement test
图4、图5给出了不同预压力下, GMM作动器输入电流与输出控制力、输出位移的关系图。由图4、图5可以看出,GMM作动器的输入电流线与输出控制力、输出位移的线性度较好;在预压力为6 MPa时,GMM作动器输出控制力和位移均可达到最大值。

图4 GMM作动器控制力输出性能Fig.4 GMM actuator output power performance
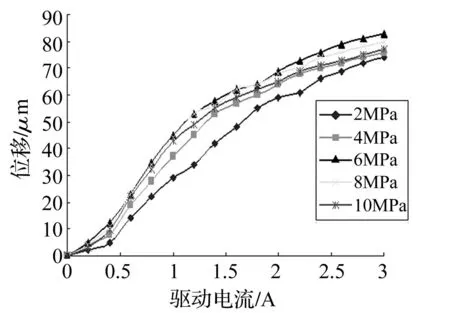
图5 GMM作动器位移输出性能Fig.5 GMM actuator output displacement performance
1.3基于GMM作动器杆件的动力学状态方程
根据结构动力学原理,结构控制的动力学方程可表示为[16]:
(1)
(2)
式中:

M、C、K、Ds、Bs与式(1)相同;In∈Rn×n为单位矩阵;0为下角标标注维数的零矩阵。
2T-S型模糊神经网路控制系统设计
2.1模糊神经网络控制系统的输入与输出
考虑由两个输入和一个输出的二维模糊逻辑推理构成的控制系统,针对结构的地震响应控制和GMM作动器特点,选取作动器两端节点的相对位移和相对速度为输入变量,作动器的控制电流为输出变量,控制作动器向被控对象输出控制力的大小,从而实现对空间结构的主动控制。控制系统如图6所示。
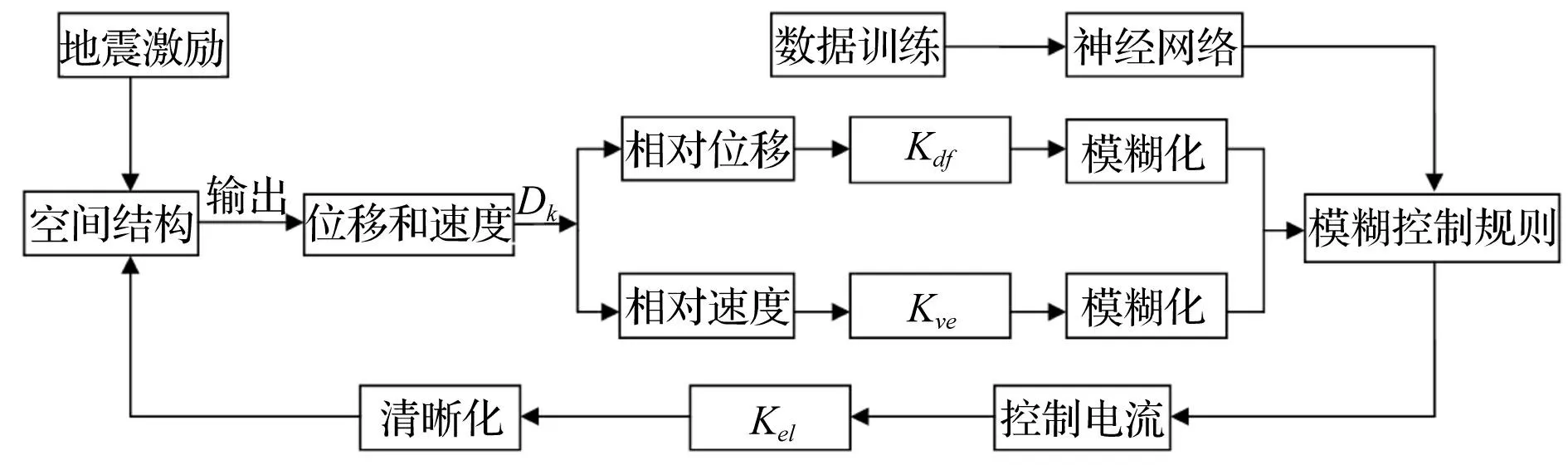
图6 模糊神经网络控制系统Fig.6 Fuzzy neural net work control system
2.2控制量的模糊化

(3)
在模糊论域内将相对位移对称地映射为5个模糊状态:NB(负大)、NS(负小)、ZE(零)、PS(正小)、PB(正大)。同理将输入变量相对速度和输出变量电流均划分为5个模糊子集:[NB,NS,ZE,PS,PB]。
2.3基于T-S型的模糊神经网络结构
基于T-S模型的模糊神经网络结构如图7所示。由该图可以看出,该网络由前件网络和后件网络两部分组成[17-19]。

图7 基于T-S模型的模糊神经网络结构图Fig.7 Structure of T-S type fuzzy neural network
(1) 前件网络
第一层为输入层。它的每个节点直接与输入向量的各分量xi连接,它起着将输入值x=[x1,x2,…,xn]T传输到下一层的作用。该层的节点数N1=n。


i=1,2,…,n;j=1,2,…,mi
(4)
式中:n是输入的维数;mi是xi的模糊分割数。例如,若隶属函数采用高斯函数表示的铃形函数,则
(5)

第三层为模糊规则层。每个节点代表一条模糊规则,它是用来匹配模糊规则的前件,计算出每条规则的和适度,即
(6)
第四层的节点数与第三层相同,即N4=N3=m,它所实现的是归一化计算,即
(7)
(2) 后件网络
后件网络由r个结构相同的并列子网络所组成,每个子网络产生一个输出量。
第一层为输入层。它将输入变量传送到第二层。输入层第0个节点的输入值x0=1,它的作用是 模糊规则后件的常数项。
第二层共有m个节点,每个节点代表一条规则,该层作用是计算每一条规则的后件,即

i=1,2,…,r,j=1,2,…,m
(8)
第三层为输出层。它是计算系统的输出,即
(9)


图8 基于T-S模型的模糊神经网络简化结构图Fig.8 Simplified structure of T-S type fuzzy neural network
3基于T-S模型的模糊神经网络控制仿真分析
为了验证建立的控制系统和控制策略的正确性和有效性,在不考虑噪声的影响下,选取如图9(a)所示的凯威特型单层球面网壳结构为模型,节点及杆件编号如图9(b)所示,经优化后GMM作动器布置如图9(c)所示。对模型在x 方向输入一条加速度峰值为400 gal,持时20 s,时间间隔0.02 s的El-Centro地震波,进行仿真分析。所选凯威特模型跨度为20 m,矢高4.08 m,矢跨比0.204,型材均为Q235钢,弹性模量E=206 GPa,密度ρ=7.8×103kg/m3,所有杆件均采用Φ60×3.5的钢管,横截面积A=6.12×10-4m2。
对凯威特型单层球面网壳结构模型进行振动控制时,首先对模糊神经网络进行离线训练,通过离线训练确定其控制输入的隶属度函数,如图10(a)、(b)、所示。同时根据模型结构地震响应控制特点,利用专家经验,建立模糊控制规则,如表1所示,输出特性曲面如图11所示。

表1 模糊控制规则表

图9 凯威特型单层球面网壳结构图Fig.9 Kiewitt single-layer spherical shell structure

图10 隶属度函数曲线Fig.10 Membership function curve

图11 模糊规则输出特征曲面Fig.11 Output characteristic surface of fuzzy rules
基于以上T-S型模糊神经网络及标准型模糊神经网络控制器,根据优化后的作动器布置情况对凯威特模型结构进行主动控制。给出模型结构顶点O位置的位移和速度仿真结果,如表2和图12、13所示。
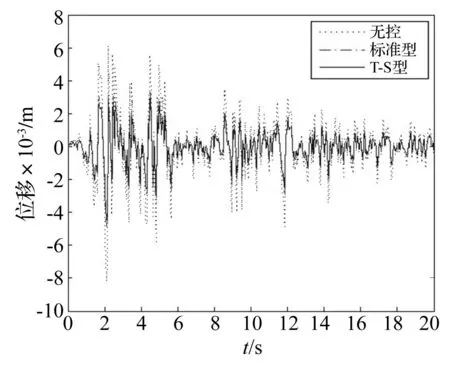
图12 O点 x方向位移时程曲线对比Fig.12 The contrast curves of x-displacement of the O node

图13 O点x方向速度时程曲线对比Fig.13 The contrast curves of x-speed of the O node
上述结果表明两种模糊神经网络模型对空间结构模型的控制都达到了良好的效果。其中,采用T-S型模糊神经网络控制顶点O位置峰值位移比无控状态下的峰值位移减小46.34%,峰值速度降低了33.04%;采用标准型模糊神经网络控制顶点O位置峰值位移比无控状态下峰值位移减小39.02%,峰值速度降低25.59%。由此可见两种模糊神经网络都能达到满意的控制效果,但基于T-S型模糊神经网络控制效果较好,并且其模糊推理计算简单,仿真速度远快于标准型模糊控制神经网络,因而空间结构的主动控制采用T-S型模糊神经网络更能满足工程应用的要求。

表2 结构模型顶点仿真结果表
4结论
(1) 自主研发的GMM作动器在预压力值为6MPa时输出性能最好,且输出作动力与输入电流呈较好的线性关系,磁机转化效率较高,驱动性能良好。
(2) 基于自主研发的GMM作动器的控制特性,应用T-S型模糊神经网络设计了空间结构的主动控制系统,并对空间结构模型进行了El-Centro地震波的仿真分析,结果表明空间结构模型的节点位移和速度都得到了有效地控制,说明模糊神经网络系统控制的有效性。
(3) 通过对两种类型模糊神经网络的仿真对比,可以看出二者对空间结构模型的控制效果都较为明显,但基于T-S型模糊神经网络控制效果较好,且推理过程更简单,仿真速度更快捷。因此,空间结构的主动控制采用T-S型模糊神经网络更能满足工程应用的要求。
(4) T-S型模糊神经网络不需要建立精确模型,通过对数据样本的分析处理,可以得出良好的模糊控制规则。同时,神经网络的在线学习能力,可对结构进行实时监控,在线反馈和调整控制规则,从而能够建立鲁棒性更好的模糊控制规则,达到快速、有效地对结构进行主动控制。
参 考 文 献
[1] Houssein N, El-Hassania K K, Heng Hu, et al. Active vibration damping of composite structures using a nonlinear fuzzy controller[J]. Composite Structures, 2012, 94: 1385-1390.
[2] Fujtani H, Midorikawa Y. Seismic response control tests and simulations by fuzzy optimal logic of building structures[J]. Engineering Structure, 1998, 20(3): 164-175.
[3] Pourzeynali S, Lavasani A A, Modarayi A H.Active control of high rise building structures using fuzzy logic and genetic algorithms[J]. Engineering Structures, 2007, 26: 346-357.
[4] Ghaboussi J,Joghataie A. Active control of structures using neural networks[J]. ASCE Journal of Engineering Mechanics Division, 1995, 151(4): 555-567.
[5] 欧进萍,王刚,田石柱.海洋平台结构振动的AMD主动控制试验研究[J].高技术通讯,2002,12(10):85-90.
OU Jin-ping, WANG Gang, TIAN Shi-zhu. Experimental research on AMD control of structural vibration of offshore platform[J]. High Technology Letters, 2002, 12(10):85-90.
[6] 李宏男,李宏宇,董松员,等.基于模糊神经网络系统的结构主动控制[J].沈阳建筑大学学报:自然科学版,2005,21(2):99-102.
LI Hong-nan, LI Hong-yu, DONG Song-yuan, et al. Active control of structures using fuzzy neural netwo RK[J]. Journal of Shenyang Arch. and Civ. ENG .Univ., 2005, 21(2): 99-102.
[7] 侯淑萍,杨庆新,陈海燕,等.超磁致伸缩材料的特性及其应用[J].兵器材料科学与工程,2008,31(5):95-98.
HOU Shu-ping, YANG Qing-xin, CHEN Hai-yan, et al. Characteristic and application of giant magnetostrictive material[J].Ordnance Material Science and Engineering,2008,31(5):95-98.
[8] Braghin F,Cinquemani S,Resta F. A model of magnetostrictive actuators for active vibration control[J]. Sensors and Actuators a: Physical, 2011, 165: 342-350.
[9] Ohmata K, Zakike M, Koh T. Hree-link arm type vibration control device using magnetostrictive actuators[J]. Journal of Alloys and Compounds, 1997, 258(1): 74-78.
[10] 李琳,陈亮良,杨勇.超磁致伸缩作动器的结构分析[J].北京航空航天大学学报,2013,39(9):74-78.
LI Lin, CHEN Liang-liang, YANG Yong. Structural analysis of giant magnetostrictive actuator[J]. Journal of Beijing University of Aeronautics and Astronautics, 2013,39(9):74-78.
[11] 徐峰,张虎,蒋成保,等.超磁致伸缩材料作动器的研制及特性分析[J].航空学报,2002,23(6):552-555.
XU Feng, ZHANG Hu, JIANG Cheng-bao, et al. Designing and performance research of giant magnetostrctive actuator[J]. Acta Aeronatutica ET Astronautica Sinica, 2002,23(6):552-555.
[12] 顾仲权,朱金才,彭福军,等.磁致仲缩材料作动器在振动主动控制中的应用研究[J].振动工程学报,1998,11(4):381-388.
GU Zhong-quan, ZHU Jin-cai, PENG Fu-jun,et al.Study on the application of magnetostrictive actuator for active vibration control[J]. Journal of Vibration Engineering,1998,11(4):381-388.
[13] 史霄.多自由隔振平台微振动混合控制研究[D].深圳:哈尔滨工业大学,2010.
[14] 杨兴,贾振元,郭东明.超磁致伸缩材料的伸缩特性及其磁感应强度控制原理及方法的实现[J].电工技术学报,2001,16(5):55-58.
YANG Xing, JIA Zhen-yuan, GUO Dong-ming. The elastic characteristic of the giant magnetostrictive materials and the realization of its control principle based on magnetic induction[J]. Transactions of China Electortechnical Society, 2001, 16(5): 55-58.
[15] Gros L, Reyne G, Body C. Strong coupling magneto mechanical applied to model heavy magnetosirictive actuators[J]. IEEE Transactions on Magnetics, 1998, 34(5): 3150-3153.
[16] 欧进萍.结构振动控制-主动、半主动和智能控制[M].北京:科学出版社,2003:39-40.
[17] 姜长生,王从庆,魏海坤,等.智能控制与应用[M].北京:科学出版社,2007:304-308.
[18] 李国勇.智能控制及其MATLAB实现[M].北京:电子工业出版社,2005:273-279.
[19] Chen K T, Chou C H, Chang S H, et al. Adaptive fuzzy neural network control on the acoustic field in a duct[J]. Applied Acoustics, 2008, 69(6): 558-565.
第一作者 杨涛 男,博士生,1984年6月生
摘要:基于自主研发的超磁致伸缩材料(Giant Magnetostrictive Material,GMM)作动器的主动控制特性,应用T-S(Takagi-Sugeno)型模糊神经网络设计了主动控制系统,该系统以GMM作动器两端节点的相对速度和相对位移作为输入,计算输出控制电流。通过神经网络的自适应学习功能进行模糊划分及生成模糊规则,利用模糊系统的推理能力对空间结构模型进行基于地震响应的主动控制仿真,同时与标准型模糊神经网络系统进行仿真对比。结果表明,二者对空间结构模型的主动控制都能达到良好效果,基于T-S型模糊神经网络推理简单,其仿真速度远快于标准型。因此,采用T-S型模糊神经网络对空间结构进行主动控制更能满足工程应用需求。
关键词:GMM作动器;模糊神经网络;主动控制;仿真;空间结构
Active control of spatial structure based on GMM actuator and T-S type fuzzy neural network
YANGTao1,WANGShe-liang1,DAIJian-bo2(1. College of Civil Eng, Xi’an Univ of Architecture and Technology, Xi’an 710055, China; 2. College of Mechanical Eng, Xi’an Shiyou Univ, Xi’an 710065, China)
Abstract:Based on independently developed Giant Magnetostrictive Material (GMM) active control actuator, a Takagi-Sugeno (T-S) fuzzy neural network control system of a spatial structure was designed, in which the relative displacement and relative speed of two nodes at the end of the active-member were taken as inputs, and the output control current was calculated by the network. Taking advantage of the adaptive neural network learning function to achieve the fuzzy division and to generate fuzzy rules, an active control simulation of the spatial structure model under the action of seismic response by using the fuzzy reasoning capability, was carried out and the results were compared with the results produced by the simulation of a corresponding standard fuzzy neural network model. The results demonstrate that both the models can achieve good control effects, but the simulation speed of the T-S fuzzy neural network is far faster than the standard model. Therefore, the T-S fuzzy neural network controller can better meet the needs of engineering application requirements.
Key words:GMM active control actuator; fuzzy neural network; active control; simulation; spatial structure
中图分类号:TU32;TP273
文献标志码:A DOI:10.13465/j.cnki.jvs.2015.24.001
通信作者王社良 男,教授,博士生导师,1956年11月生
收稿日期:2014-12-03修改稿收到日期:2015-03-02
基金项目:国家自然科学基金 (51178388,51108035);国家重点实验室开放项目(08KF02);陕西省工业攻关项目(2013K07-07,2014K06-34);西安建筑科技大学创新团队资助项目
猜你喜欢
海洋通报(2022年6期)2023-01-07
新农业(2020年18期)2021-01-07
阿来研究(2020年1期)2020-10-28
——评《多中心城市空间结构:概念、案例与优化策略》
浙江工业大学学报(社会科学版)(2020年2期)2020-07-17
环球人文地理·评论版(2016年8期)2017-01-19
科技资讯(2016年18期)2016-11-15
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03