
基于Ansys Workbench的上料手龙门架的分析
2016-02-10 12:40冯晓虎
电子工业专用设备 2016年12期
贾 龙,刘 健,冯晓虎
(中国电子科技集团公司第二研究所,山西太原030024)
基于Ansys Workbench的上料手龙门架的分析
贾 龙,刘 健,冯晓虎
(中国电子科技集团公司第二研究所,山西太原030024)
手机屏模组需要进行一系列测试,其测试趋于自动化发展,通过设计自动上料机械手完成整个自动化测试。通过Ansys Workbench对手机屏模组测试机的上料手龙门架使用有限元法进行上料动态分析,检测设计的合理性。
有限元法;龙门架;动态分析
Ansys Workbench中的结构力学模块可以进行瞬态动力学分析,可以模拟结构在一定条件的载荷作用下的动力响应,计算整个响应过程中的变形和应力等随时间的变化,并根据模拟结果对所设计结构进行分析和指导。本文通过使用Ansys Workbench对上料手龙门架结构进行瞬态动力学分析,得出龙门架的一系列关键参数,为下一步设计提供依据。
1 上料手龙门架整体结构
图1为上料手龙门架的模型,上料手需要完成直线搬运动作。龙门架整体采用60 mm×60 mm的方钢管焊接作为龙门立柱支撑,15 mm厚钢板作为横梁,并且焊接导轨安装条。直线搬运动作通过电机带动丝杠完成,进行移动吊装的电缸模组,电缸模组下装有取料机械手。通过上料工作节拍推算出丝杠的单程移动时间为1 s,选择丝杠导程为20 mm,电机最高工作转速为3000 r/min,最高速度为1 000 mm/s,加减速时间分别为0.1 s。
2 模型简化与预处理
将模型简化,计算电缸以及上料手的质量,并采用均布质量取代。如果采用质量点取代,则质量点不能分布在多个网络单元中,否则无法计算。而为了模拟结果接近真实情况,网络质量需要较高,所以只能采用均布质量。
添加配合和约束。在龙门架两个地脚处施加固定约束,丝杠安装板与导轨添加无摩擦配合,丝杠安装板添加位移约束为0,与运动方向垂直。为丝杠安装板添加速度,加速0.1 s,速度达到1 000 mm/s后维持0.8 s,减速0.1 s后速度为0。其余配合为螺栓连接,均设为绑定接触。添加标准重力加速度,整体预处理条件如图2所示。
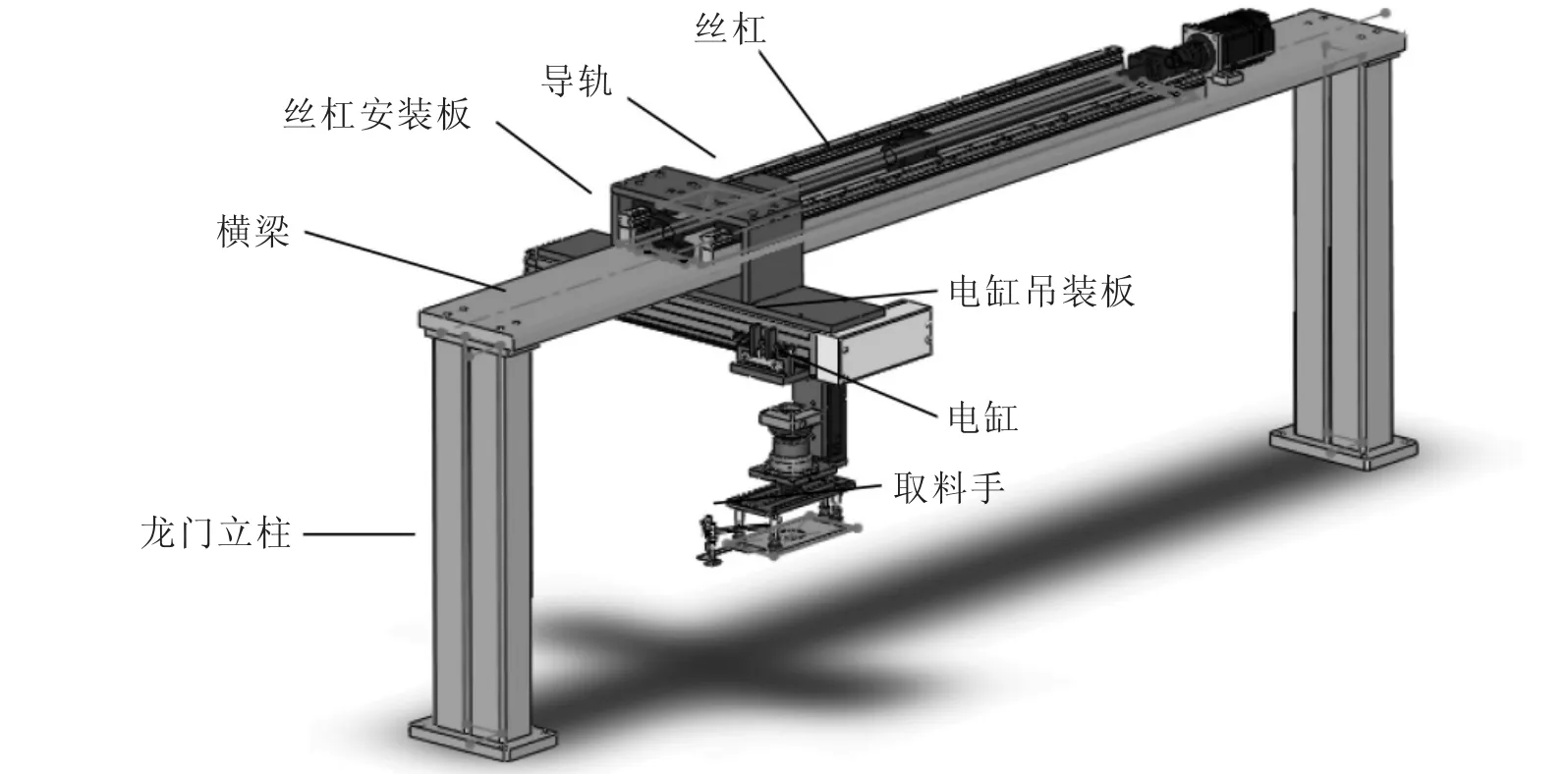
图1 上料手龙门架结构
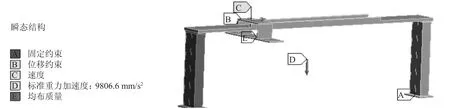
图2 简化模型
然后对模型进行网络划分,网络划分不能太粗糙,否则会计算不出结果或者计算结果会很不真实。网络划分太细则会影响分析效率,导致计算时间过长。对模型中厚度为10 mm的部分将单元尺寸控制在5 mm,而其余部分单元大小控制在10 mm,网络划分完成后检查模型整体网络单元的数据统计,主要是单元质量和畸变程度的分布,可以看到网络划分效果良好(见图3、图4、图5)。
3 求解与结果分析
为了确定瞬态分析中的时间步长,在柔体动力学分析之前需要首先进行系统的模态分析,进而确定所关心的最高阶的模态频率。初始时间步长选择采用以下方程确定:
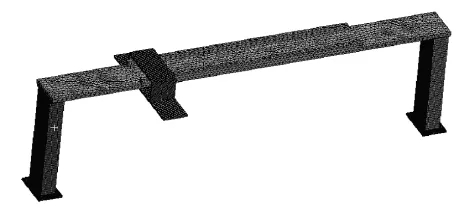
图3 网络划分效果
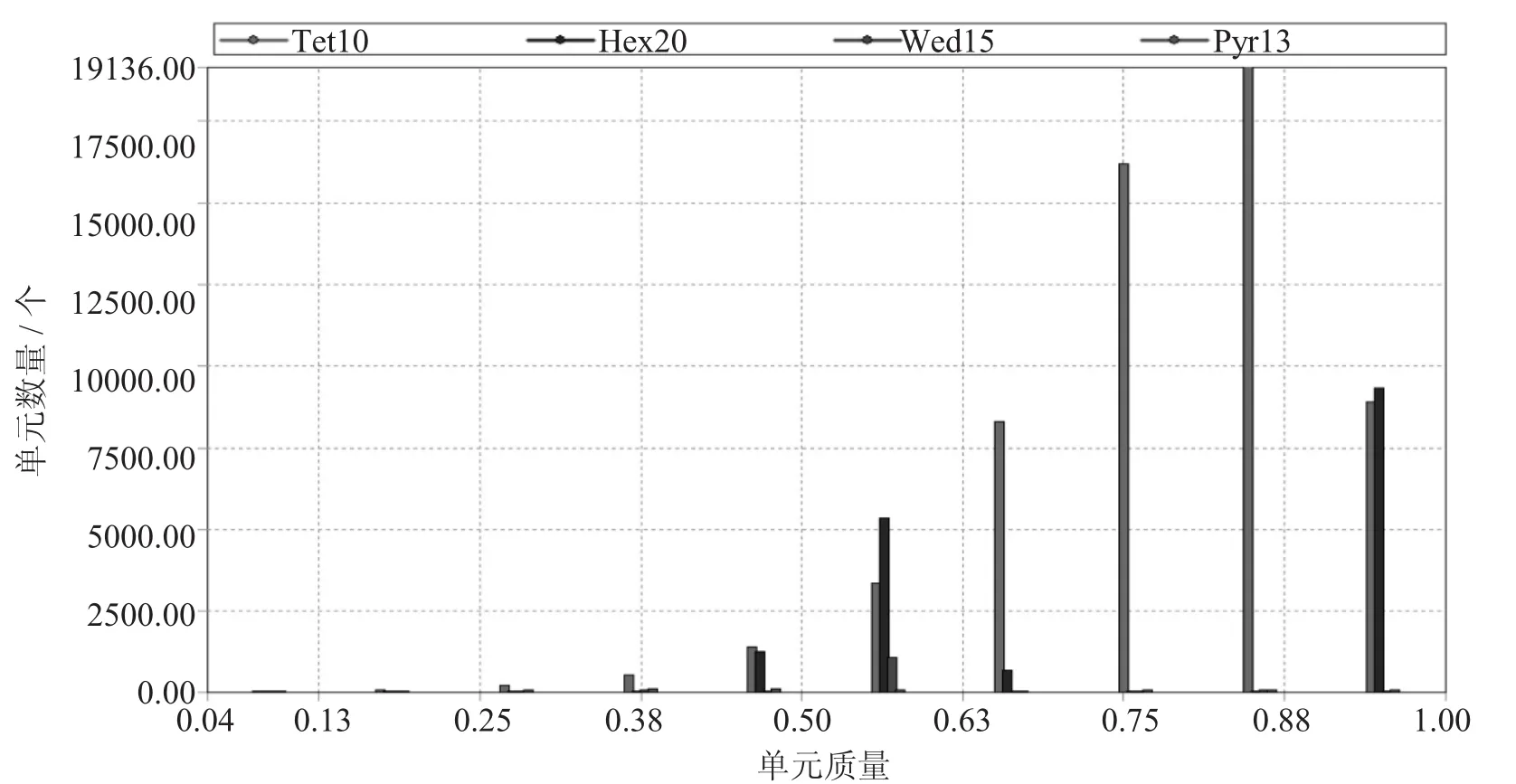
图4 单元质量统计
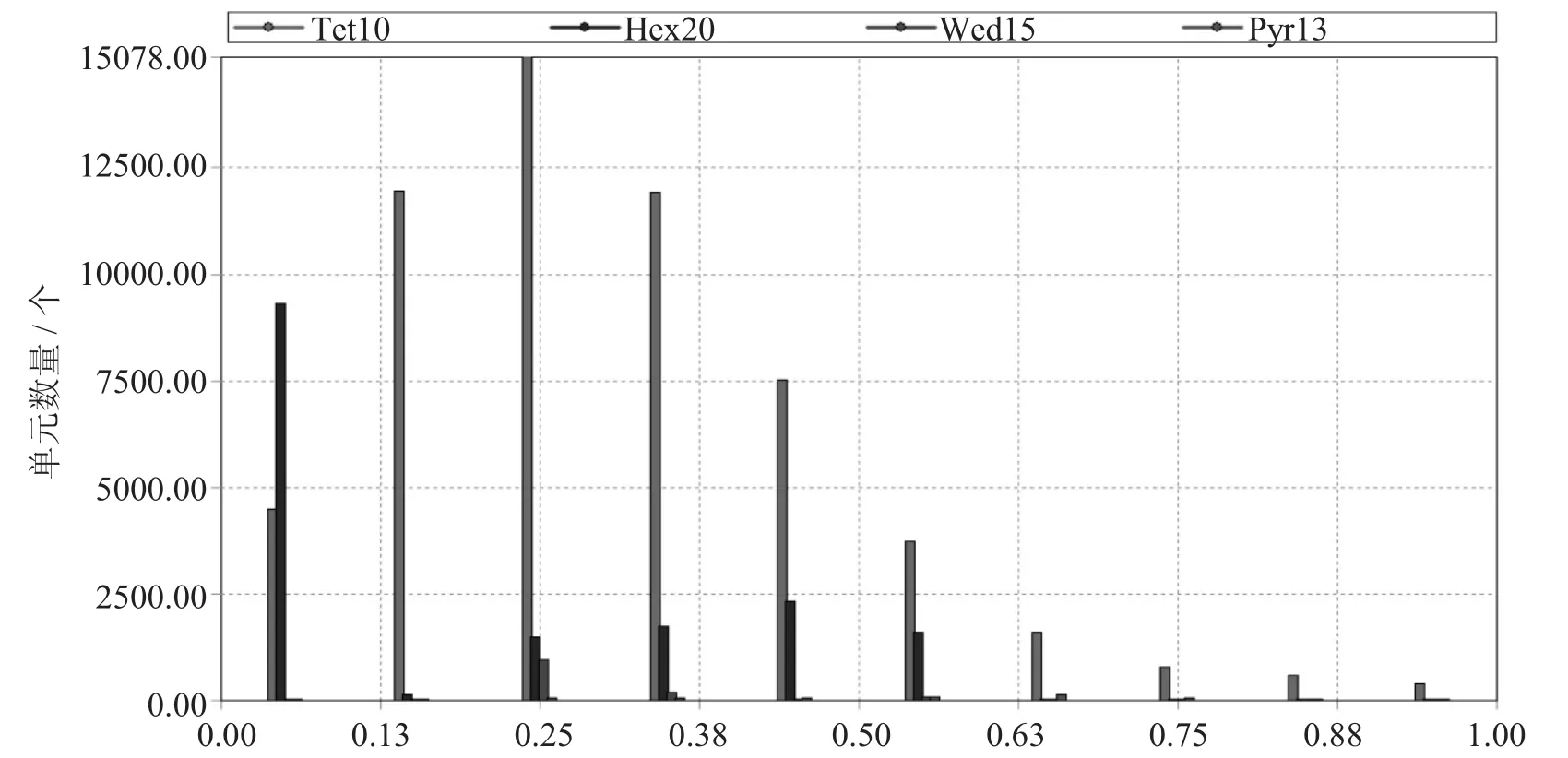
图5 畸变程度统计
f是所关心的最高阶模态振型的频率。对龙门架进行模态分析,找出最重要的模态振型,频率为51.166 Hz,f取整后得到初始步长为0.001 s。
初始条件为默认,无初始速度和加速度。分析步长为1 s,初始步长设为0.001 s,最小步长设为0.000 5 s,最大步长设为0.001 5 s,进行求解。龙门立柱采用两根方钢管焊接而成,首先检查整个过程的立柱变形大小(见图7、图8)。

图6 龙门架主体一阶模态振型

图7 近端立柱变形-时间曲线

图8 远端立柱变形-时间曲线
从图7以及图8中可以看出方钢管立柱在启动阶段初期的变形最大,不过最大只有0.03 mm。在整个运动过程中,由方钢管做龙门立柱完全可靠,分析图见图9~图14。

图9 横梁变形-时间图

图10 横梁变形分布

图11 横梁等效应力曲线

图12 初始阶段横梁最大应力分布

图13 中间阶段横梁最大应力分布

图14 结束阶段横梁最大应力分布
从以上三个阶段横梁最大应力分布图中可以看出初始和结束阶段应力最大处为靠近载荷的横梁和立柱结合处,中途阶段应力最大处为载荷附近。可以在立柱与横梁连接处增加加强筋,以改善应力分布,见图15。
丝杠安装板的运动设定为加速时间0.1s,匀速时间0.8 s,减速时间0.1 s。从结果来看,由于横梁为两段支撑,整个加速和减速过程均伴随着上下波动。丝杠板的变形图中可以看出所有阶段的变形值均为负值,这是由于运动过程中横梁会向下弯曲。根据图9横梁变形时间图和图16丝杠安装板加速度-时间曲线可以看到在1 s的运动过程中,横梁共有约40次小幅振动。如此对取料手的设计就提出了要求,上料手的模态频率应该避开40 Hz。
本结构中共有7个部件进行连接,每个部件安全系数取1.4,7个部件的安全系数应该是1.4的7次方,约10.6。分析结果中整体安全系数为15,可以知道整个上料手龙门架的结构是比较可靠的。

图15 改善应力分布效果图

图16 丝杠安装板加速度-时间曲线
4 总 结
本研究通过Ansys Workbench提供的瞬态分析模块对自动化设备龙门型上下料机械结构在运动中的结构特性。得出龙门架结构的安全性和合理性,找出了横梁应该加固的部位,对设计取料手的模态频率提出要求并提供了依据,为下一步的设计提供了理论依据。
[1] 全大鹏,李建勇,王恒,等.基于ANSYS Workbench的固晶臂机构柔性动力学分析[J].机电工程,2012, 29(10):1146-1149.
[2] 姜振廷,郑忠才,董旭.基于ANSYS WORKBENCH的六自由度机械臂有限元分析及结构优化[J].制造业自动化,2014,36(1):122-123.
[3] 杨志敏,周健,李立君,等.基于ANSYS Workbench的采摘机器人臂架模态分析[J].农机化研究2013,12(12):56-58.
[4] 黄志新,刘成柱.Ansys Workbench14.0超级学习手册[M].B北京:人民邮电出版社,2013-4.

吴文涛
吴文涛(1981-),男,武汉人,硕士,工程师,主要从事半导体设备维护与维修。
王振亚(1981-),男,南京人,本科,工程师,主要从事半导体设备维护与维修。
徐 磊(1984-),男,盐城人,硕士,工程师,主要从事半导体设备维护与维修。
Analysis of Feeding Device of Gantry Based on Ansys Workbench
JIA Long,LIU Jian,FENG Xiaohu
(The 2ndResearch Institute of CETC,Taiyuan 030024,China)
Mobile phone screen module,as one of the most important part of smart phone,the production volume increases rapidly.It requires a series of tests and has the trend of the development of the automation,by designing automatic feeding manipulator to complete the automated testing.In this paper feeding dynamic analysis was carried out on the gantry with finite element method based on the Ansys Workbench,to test the rationality of the design.
Finite element method;Gantry;Dynamic analysis
TN948.43
B
1004-4507(2016)12-0049-06
贾龙(1988-),男,山西太原人,硕士研究生,毕业于华中科技大学,助理工程师。主要从事于电子专用设备的研究。
2016-09-12
猜你喜欢
建筑与装饰(2020年20期)2020-08-20
工程与试验(2020年1期)2020-06-18
河北省科学院学报(2020年4期)2020-03-19
制造技术与机床(2019年11期)2019-12-04
制造技术与机床(2019年1期)2019-01-14
制造技术与机床(2017年8期)2017-11-27
广西教育·C版(2016年10期)2016-12-07
发明与创新·小学生(2016年8期)2016-08-17
通信电源技术(2016年1期)2016-04-16
科学时代·上半月(2015年7期)2015-10-21
