斜置惯性平台漂移角离线复算方法
2016-10-14 14:01范金华宋建英
导弹与航天运载技术 2016年3期
范金华,彭 杰,宋建英
斜置惯性平台漂移角离线复算方法
范金华,彭 杰,宋建英
(太原卫星发射中心,太原,030027)
根据发射流程、飞行试验方案和斜置惯性平台敏感发射点重力加速度的物理特性,基于平台自标定参数、遥测加速度计脉冲数、发射点大地测量成果等试验数据,提出一种斜置惯性平台漂移角的离线复算方法。计算比对结果表明,平台漂移角的离线计算值与遥测输出结果一致,各向偏差为10-5度量级,此离线复算方法能够给出遥测存储器开始记录前的平台漂移角数据。
平台漂移角;试验数据;离线复算
0 引 言
采用平台式惯性-星光复合导航单星方案的导弹在发射前需要将惯性平台进行斜置,使星敏感器光轴对准所选星体,当导弹飞出大气层之后,根据测星结果来修正惯性导航误差[1]。平台单星方案利用恒星在空间的方位所提供的惯性空间基准来校准平台台体坐标系,然后根据最佳修正系数来估计弹头落点偏差,最后在导弹末修段按虚拟目标进行导引和关机控制[2~4]。
平台斜置完成之后,需要断调平使平台台体在惯性空间定向。随后,由于陀螺漂移误差和平台回路误差的影响,平台开始漂移。平台漂移角主要由这2个误差因素引起,相应的误差系数可通过测漂方案进行标定[5,6]。平台漂移角起算零点即为平台断调平时刻。平台漂移角是斜置惯性平台初始基准偏差修正、工具误差补偿的基本参数,研究平台漂移角的离线复算方法对飞行试验结果的实时诊断、弹上导航方案的试验鉴定等工作具有重要意义。
为了验证平台漂移角的弹上计算输出值的正确性,需要分析可用的试验数据。平台漂移角的计算主要依据平台射前自标定误差系数和遥测输出的加速度计脉冲数。考虑到地面遥测存储器启动记录与平台断调平不是同步进行的,需要根据物理特性对遥测存储器启动记录前的视速度等进行补充计算。补充计算涉及到平台台体坐标系与发射坐标系之间的关系,关联的参数包括射击方位角、射向变换角度、平台斜置方位角和高低角、平台瞄准角、平台断调平至弹射点火持续的时间、发射点大地测量结果(重力加速度、地理纬度、垂线偏差)等。计算时,需要依据斜置惯性平台敏感发射点重力加速度的物理特性,并且与发射流程和试验方案密切相关。
1 平台漂移角离线复算的基本思路
本文讨论的时序关系为:斜置惯性平台在弹射点火前断调平,而地面遥测存储器启动记录时刻介于两者之间。弹上计算的平台漂移角从地面遥测存储器启动记录时刻开始输出,离线复算的平台漂移角从断调平时刻开始输出,且断调平时刻的平台漂移角为零。具体时序关系如图1所示。

图1 时序关系
考虑到从平台断调平时刻到存储器启动记录时刻这段时间,没有记录平台脉冲数,平台漂移角离线复算时,分成2个时间段进行,并以弹射点火时刻为分割点。对于有平台脉冲数输出的情况,可以直接根据脉冲数计算视速度,然后计算平台漂移角;对于没有平台脉冲数输出的情况,由于导弹相对于地球处于静止状态,因而可以根据平台斜置状态来计算视速度,进而计算平台漂移角。
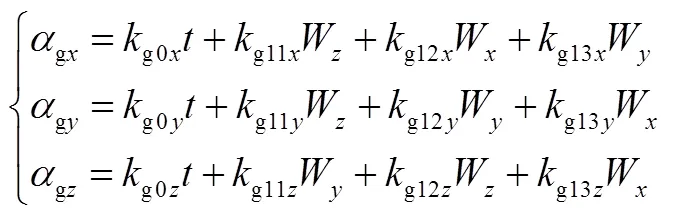
平台漂移角的计算主要依据陀螺漂移误差模型和平台回路误差模型[7]。当仅考虑陀螺的零次项漂移误差和一次项漂移误差时,陀螺漂移误差模型如下:
当仅考虑平台静态误差时,平台回路误差模型为

根据上述误差模型,平台漂移角的动态影响因素包括漂移时间和台体系视速度、视加速度、视加加速度。
2 平台漂移角离线复算方法
首先,计算平台断调平时刻至弹射点火时刻这段时间的平台漂移角;然后,计算弹射点火时刻之后的平台漂移角。两者的区别主要在于视速度的计算方法不同。
2.1 断调平至弹射点火之间的平台漂移角计算
为了计算出从断调平时刻开始的平台漂移角,需要对视速度进行补充计算。记初等转换矩阵为,其中分别表示绕坐标系的轴旋转角度。

图2 发射点视加速度示意
视加速度在垂线发射系中的3个分量为
(4)

图3 发射系与台体系之间的转换关系

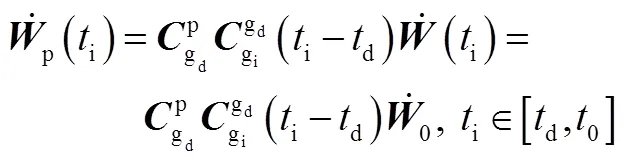
根据转换矩阵递推性,结合式(5)、式(6),有:
(7)
由式(3)、式(4)和式(7),平台台体坐标系视加速度可由下式进行计算:
2.2 弹射点火之后的平台漂移角计算
弹射点火后,导弹相对地球开始运动,计算视速度时需要用到加速度计脉冲数,即将时刻的脉冲数相对于弹射点火时刻的脉冲数增量乘以在线标定出的加速度计当量即可计算出视速度;然后,再求视速度的一阶和二阶导数即可得到视加速度和视加加速度。最后,根据式(1)和式(2)即可计算出平台漂移角。
3 计算验证
在断调平时刻处,平台台体坐标系与发射坐标系之间的欧拉角通过射击方位角、射向变换角度、平台斜置方位角和高低角、平台瞄准角来确定。根据式(8),由发射点重力加速度值可计算出斜置惯性平台敏感到的视加速度在台体坐标系中的3个分量。其中,台体坐标系轴的分量值在9.8 m/s2附近变化,轴的分量值位于10-1m/s2量级,轴的分量值位于10-2m/s2量级。这与实际情况相符。对视加速度分别进行积分和微分运算,便可得到视速度和视加加速度。
计算弹射点火之后的平台漂移角时,首先需要对加速度计脉冲数进行分析与修正[8],包括野值和溢出的处理等,然后再计算视速度及其各阶导数。
基于上述计算结果,依据陀螺漂移误差模型和平台回路误差模型便可计算出平台漂移角。将离线计算结果按遥测输出时间点进行插值,而后与遥测输出结果作差,可得平台漂移角偏差曲线。经分析,平台漂移角各向偏差为10-5度量级。
4 结 论
根据斜置惯性平台的工作特点,结合发射流程和试验方案,本文提出了一种平台漂移角的离线复算方法。这种方法根据斜置惯性平台敏感发射点重力加速度的物理特性,对弹射点火前的视速度、视加速度、视加加速度进行了补充计算,从而能够根据陀螺漂移误差模型和平台回路误差模型计算平台漂移角。
基于试验数据的计算结果表明,平台漂移角的离线计算值与弹上计算遥测输出结果一致,各向偏差为10-5度量级,且本文提出的离线复算方法能够给出遥测存储器开始记录前的平台漂移角数据。
[1] 李连仲, 韩金堆. 制导技术基础[M]//陈世年. 控制系统设计. 北京: 宇航出版社, 1996.
[2] 张艳玲, 辛万青, 王增寿. 平台单星方案原理及仿真研究[J]. 导弹与航天运载技术, 2007(5): 16-19.
[3] 叶兵, 张洪波, 吴杰. 单星星光/惯性复合制导最佳星快速确定方法研究[J]. 宇航学报, 2009, 30(4): 1371-1375.
[4] 张洪波, 郑伟, 吴杰, 汤国建. 基于信息等量压缩的单星星光-惯性制导原理研究[J]. 中国科学(E辑: 技术科学), 2009, 39(3): 550-555.
[5] 胡云中. 陀螺稳定平台漂移误差参数的辨识方法研究[J]. 航天控制, 2004, 22(2): 10-12,18.
[6] 李巍, 曾鸣, 于志伟. 惯性平台测漂方案的研究[J]. 哈尔滨商业大学学报(自然科学版), 2009, 25(1): 68-71,128.
[7] 程光显, 谢全根. 制导与精度分析[M]//龙乐豪. 总体设计(中). 北京:中国宇航出版社, 2001.
[8] 范金华, 彭杰, 郭先锋. 惯组脉冲数全量数据分析及软件实现[J]. 导弹试验技术, 2015(1): 26-30.
Inclined Inertial Platform Drift Angle off-line Recalculation Method
Fan Jin-hua, Peng Jie, Song Jian-ying
(Taiyuan Satellite Launch Center, Taiyuan, 030027)
An off-line recalculation method of inclined inertial platform drift angle was proposed according to the launch flow, the flight test scheme, and the physical characteristics of the inclined inertial platform sensing launch points gravity. The off-line recalculation method was also based on the test data, including the platform self-calibration parameters, the telemetry accelerometer pulse number, the launch points geodetic survey results. The recalculation results indicated that the off-line recalculation results of the platform drift angle were consistent with the telemetry output results, and the errors between them are in the order of 10-5measurement. In addition, the data of platform drift angle before recording of the telemetry memory was also be provided with the off-line recalculation method..
Platform drift angle; Test data; Off-line recalculation
1004-7182(2016)03-0024-04
10.7654/j.issn.1004-7182.20160306
TJ765.2+3
A
2015-09-24;
2016-01-10
国家基础研究项目
范金华(1983-),男,博士,工程师,主要从事飞行试验分析与评估研究
猜你喜欢
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
遥测遥控(2022年1期)2022-02-11
防爆电机(2021年4期)2021-07-28
中学生数理化·八年级物理人教版(2021年3期)2021-07-22
铁道通信信号(2020年6期)2020-09-21
铁道通信信号(2020年11期)2020-02-07
民用飞机设计与研究(2019年2期)2019-08-05
民用飞机设计与研究(2019年2期)2019-08-05
电子制作(2019年11期)2019-07-04
中学生数理化·八年级物理人教版(2014年1期)2015-01-09