海浪环境对航行体出水特性影响研究
2016-10-14 14:00周敬国权晓波程少华
导弹与航天运载技术 2016年3期
周敬国,权晓波,程少华
海浪环境对航行体出水特性影响研究
周敬国1,权晓波2,程少华2
(1. 海军装备部,北京,100073;2. 北京宇航系统工程研究所,北京,100076)
海浪环境对航行体出水过程具有较大影响,是当前流体动力研究的热点问题。通过分析国内外海浪环境及其对出水航行体特性的影响,介绍了海浪环境相关研究成果,而后从理论分析、数值仿真、水下控制等方面总结了海浪对航行体出水特性影响的计算方法,并对后续发展和研究方向进行了讨论。
水下航行体;海浪;空泡
0 引 言
海浪是海水运动的重要形式之一,组成海浪的水质点做周期性的往复振荡运动,在时间和空间上交替出现的波动现象。对于水下航行体而言,波浪载荷是其所受外力的重要组成部分,并对航行体结构及运动轨迹造成影响。特别是当航行体涉及出水运动时,海浪水质点速度较大,波浪载荷对航行体浸没区受力的影响起到主要作用,从而直接决定其水下受力特性与运动轨迹。波浪载荷作用下航行体出水特性是开展水下航行体设计的基础。
近年来随着海军对实战化能力要求的不断提高,航行体对复杂海洋环境的适应能力受到越来越多的关注。然而,海洋环境对航行体出水运动的影响具有较大的工程设计难度,一方面自然界中存在的海浪变化特性十分复杂,海浪呈现出高低、长短杂乱无章的特征,航行体出水时海浪自由界面具有较大的随机性;另一方面航行体在穿越自由液面的过程中,同时处于气、水2种不同的介质中,在较短的时间内将承受剧烈变化的力和力矩,航行体受力具有明显的非线性和非定常特性[1,2]。波浪随机性对出水航行体非线性受力的影响研究,已经成为流体力学领域研究的热点问题。
本文针对波浪对航行体的出水运动影响研究问题,介绍了目前海洋环境的相关研究成果,分析了常用的海浪影响下航行体出水计算方法,总结了海浪对航行体流体动力、弹道、水下控制方面的研究内容,对后续的发展和研究方向进行了展望。
1 海浪环境
建立可反映真实海浪的波浪模型是准确确定波浪载荷的前提。对于复杂的海浪波动现象,通过不断地将实际观测值和理论值相比较、修正,形成有效的海浪理论模型、实现对海浪环境的准确预报,是海洋环境研究的重要工作内容[3]。伴随着航海的发展和远洋资源的开发利用,人类对于海洋、波浪的研究取得了很大的进展,形成了基于线性边界条件假定的有限振幅水波理论和基于具有各态历经性的平稳随机过程假定的随机海浪理论。
有限振幅水波理论将海浪运动视为确定的函数形式,通过流体动力学分析揭示各种情况下海浪的动力学性质和运动规律。通过建立线性波、Stokes波、余弦波、孤立波理论等多种解析方法来分析波浪中流体的运动规律和参数分布等,构成海浪环境对航行体水下运动研究的理论基础。
线形波模型最初由Airy于1845年提出,又称为Airy波理论,也被称作正弦波(或余弦波)。线性波波浪要素如下所述。
速度势函数:
波面方程:
(2)
色散方程:
由速度式函数式(1)可求得一阶近似的速度场为

(5)
式(3)为色散方程,其规定了波浪的频率与波数之间的关系,即确定了波长与波浪周期之间的关系。
在极限情况下对于无限深度的水质点而言,波浪的速度势函数可表述为
线性波理论是各种波浪理论中最为基本的理论,其概念清晰,公式简明,运用方便,在海洋与海岸工程研究中被广泛应用,并解决了许多相关工程问题。与此同时,线性波理论还被应用到非规则波的波谱理论当中,用于生成非规则波。因此,说线性波理论是一种应用面较为广泛的波浪理论,在波浪理论中占有相当重要的地位,线性波不同相位下波浪速度方向如图1所示。
图1线性波不同相位下波浪速度方向示意
随机海浪理论将海浪运动视为随机过程,通过随机过程理论分析给出各种情况下海浪运动的统计特性。将海浪波动视为由无限多个频率不等、方向不同、振幅变化而相位杂乱的有限振幅水波叠加而成的不规则波系。其波面方程可以表示为
观测数据的积累、海浪统计理论的建立以及风浪生成、耗散、非线性波相互作用理论研究的深入为随机海浪环境的建模奠定了基础[4]。从目前应用广泛性上来看,对随机海浪模型的研究主要采用海浪谱经验描述方式,这也为随机海浪对航行体出水过程的研究提供了模型手段。
自20世纪50年代初Pierson等人率先将频率谱分析方法应用于海浪,利用随机谱描述海浪成为主要研究途径;Phillips利用量纲分析方法得到5指数形式的高频频率谱;Pierson和Moskowitz利用北大西洋的观测数据导出了P-M谱,把Phillips方法扩展至整个海浪谱段;德国、英国、美国和荷兰等国有关组织于1968~1970年进行的“联合北海波浪项目”是一次迄今最系统的海浪观测工作,在此工作的基础上提出JONSWAP谱;1990年中国文圣常教授基于能量平衡方程提出文圣常谱。从总体上来看,目前各种谱模型都是依据世界不同海区的观测资料而得到的具有一定经验性质的谱表达式,由于采用的方法、数据源不同,各种波浪谱之间差别较大,而且波浪谱的形式直接影响动力计算结果。因此,在实际使用时有必要对国内外各种典型波浪谱的适用性加以分析和选择。目前,适用范围较为广泛的为P-M谱,其表达式为

2 海浪环境对水下航行体运动特性影响
2.1 海浪对航行体运动特性影响计算方法
海浪环境对水下航行体运动特性的计算方法,可以追溯至1955年Korvin-Kroukovsky切片概念的提出和Morison计算柱体在海浪环境中载荷经验公式,到了20世纪70年代,切片理论的研究常采用多极展开法与源分布密切拟合的势流计算方法。近年来,随着计算技术的发展,更多的是采用求解常微分方程与N-S方程耦合的全三维方法[5~7]。
在海洋工程设计中,通常采用Morison公式计算小构件的波浪载荷。Morison于1950年在模型试验的基础上,提出计算垂直于海底的刚性柱体上的波浪载荷计算公式。该公式假定柱体的存在对波浪运动无显著影响,认为波浪对柱体的作用主要是粘滞效应和附加质量效应。Morison公式给出竖直圆柱单位长度上受到的水平波浪力为
Morison公式物理概念清晰、简便实用,但其计算精度将受到试验或经验系数的影响,特别是水下航行体尺寸大到一定程度时,Morison公式的适用性需要进一步研究。在此基础上,势流理论由于其计算精度和可靠性较高在波浪对船舶运动影响研究中获得广泛应用,出现了切片法、STF方法、二维半方法等[8,9]。针对海浪影响下水下航行体出水过程,一般忽略自由液面效应,且由于航行体直径远小于海浪波长,仅考虑入射波的影响,基于海浪理论开展海浪对航行体运动及受力特性影响研究。
上述方法由于采用流场的相关假设,将波浪条件下复杂流场压力分布结构处理成解析解或经验公式的方式,具有主要特征突出、计算效率高等特点,是目前开展规则波和随机海浪对全湿流航行体出水特性研究的主要技术手段。但由于未能考虑海水粘性、表面张力的影响,计算的可信度尚需要通过试验进行进一步验证,且在涉及带空泡航行体出水问题时存在较大的局限性。
随着数值计算方法的不断发展,通过N-S方程的数值造浪手段模拟海面波浪的流场,并结合动网格技术实现航行体在带波浪水面下运动的模拟,为解决波浪环境下航行体水下受力与运动问题提供了更为可靠的计算手段。数值造波是采用数值仿真手段研究海浪环境对水下航行体运动特性影响的基础。通过数值造波,可在求解域内实现试验所需要的各种形式的波浪场,例如线性波、二阶Stokes波以及非规则波等。常用的数值造波方法包括摇板造波法、源项造波法、边界造波法等。
摇板造波法属于仿物理造波法,即在数值水池中模仿真实试验水池中的造波机,将其设置为扰动源。He等在二维数值水槽中应用数值摇板造波机模拟了强非线性波浪[10],Finnegan等将造波机理论应用于波浪-结构物相互作用的数值计算中,取得了较为满意的结果[11]。
摇板造波法原理简单,可通过试验手段进行检验,但其涉及动网格技术以及结构化与非结构化网格相结合的混合过程,造波过程相对复杂,对计算机性能要求较高。
源项造波法和边界造波法同属纯数值造波法。Brorsen等基于边界积分方程势流方法(BIEM)实现了源项造波,生成了二维非线性波浪[12];Lee等提出的适用于不同形式的Boussinesq方程的源项造波法,分析了波浪传播的变形问题[13]。源项造波法适应性强,但由于其造波方式较为理想化,无法在现实中予以实现。边界条件法是根据波浪的解析理论,在固定边界上给定数值入射速度,齐鹏等采用这种方法通过求解N-S方程建立三维下数值波浪水槽[14]。边界造波法受控波面的边界条件可用单一的方程给出,可较容易地控制所造波浪的频率、振幅,在三维模式中应用较为有效。
典型状态下边界造波法边界条件设置如图2所示。
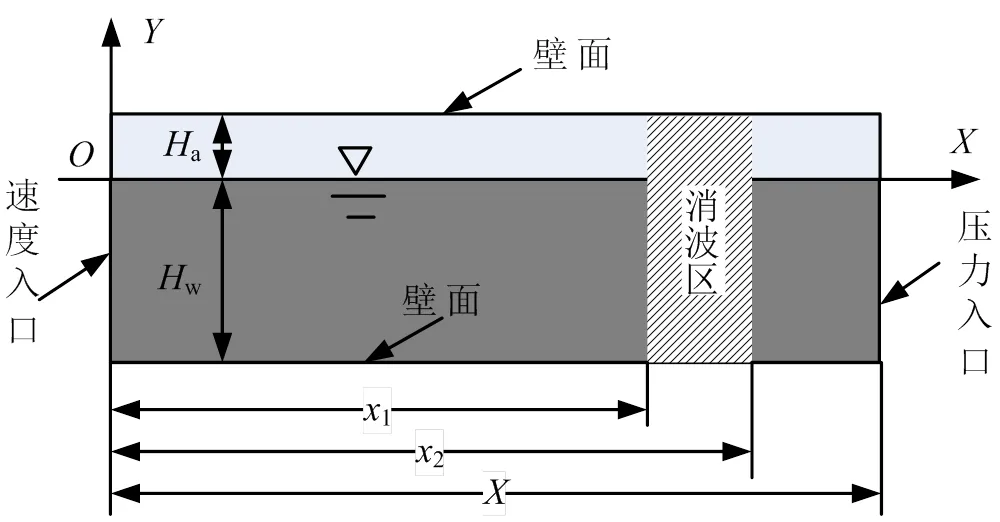
图2 边界造波法边界条件设置
图2中,空气域高度a=0.25,为对应浪级下波长;水深w=0.75;为水槽长度,=4;1为消波区起始位置,1=3.0;2为消波区结束位置,2=3.5;水槽入口采用速度入口边界条件,出口采用压力出口边界条件,上下均为滑移壁面边界条件。源项造波法边界条件设置与边界造波法相似,不同之处在于源项造波法入口边界处需要单独定义一个造波区域。
在二维条件下对边界造波法、源项造波法与Stokes理论波形进行比较,其中数值造波法气、水界面通过VOF模型进行模拟,湍流模型选用标准模型,采用结构化网格划分。数值造波方法与理论计算结果比较如图3所示。
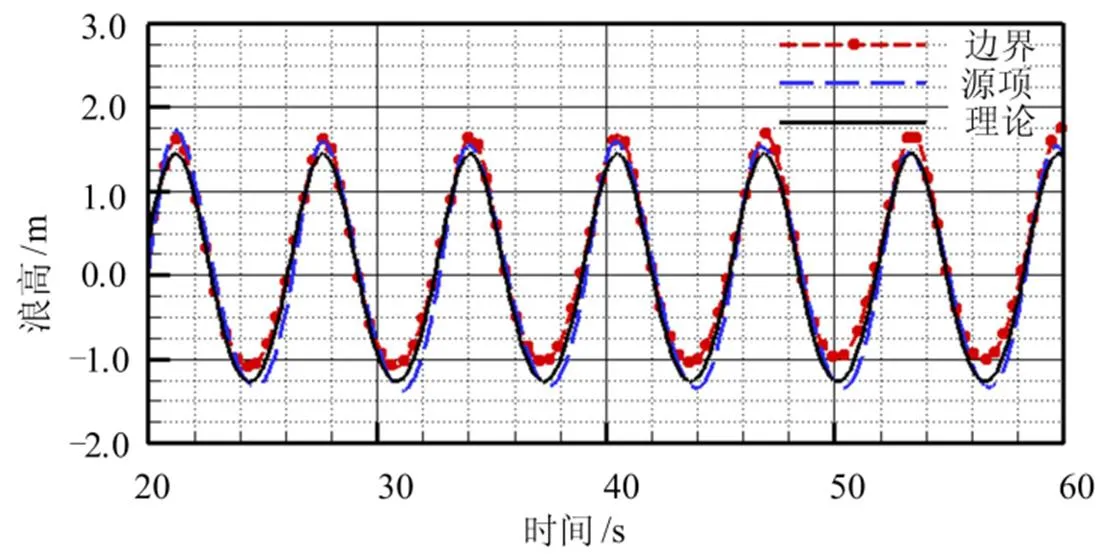
图3 数值造波方法与理论计算结果比较
由图3可以看出,数值造波波形与理论计算结果基本一致,Stokes波理论解是在液体无粘、无旋假设前提下通过摄动法得到的,而波浪数值仿真中则考虑了液体的粘性作用,通过N-S方程求解得到,因此数值造波(边界造波法、源项造波法)波高较理论波高有一定的偏差。
在数值造波基础上,可进一步开展波浪对水下航行体出水过程的三维流场结构、动力学特性、运动轨迹的数值仿真研究工作。某航行体在波浪中运动示意如图4所示。
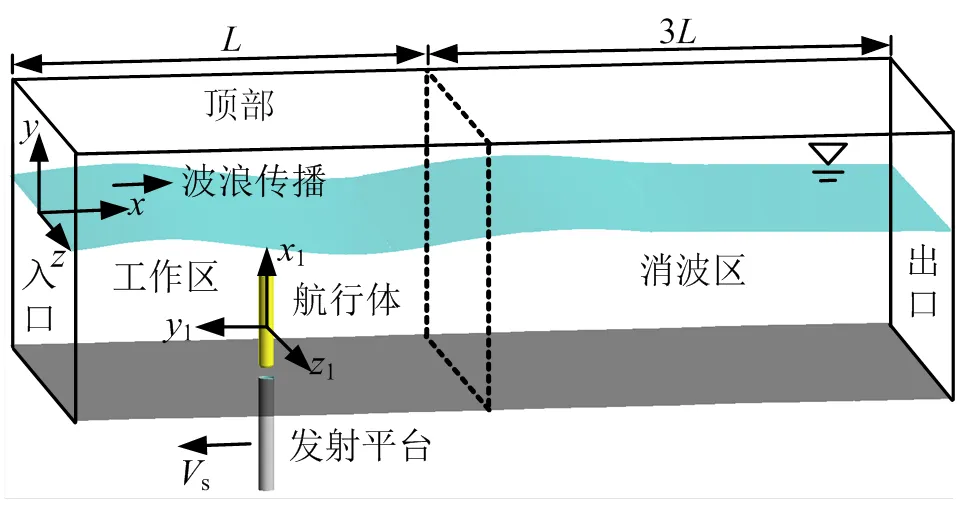
图4 航行体在波浪中运动计算域
由图4可知,该船行体设有工作区(造波区)和消波区,在一定运动速度发射平台上运动。
2.2 海浪对航行体水动力和运动特性影响
在航行体出水运动过程中,海浪对航行体水动力系数(包括定常力、惯性力等)均产生明显的影响,且随着航行体各截面依次出水,航行体所受流体动力急剧变化,导致出水弹道变化特征较为复杂。
在理论计算方面,可快速获得海浪浪高、浪向、出水相位对流体动力及弹道的影响规律,从而为水下弹道的设计提供依据。杨继锋等[15]将航行体离散化为多个表面单元,根据线性波理论和Morison公式计算各单元所受的波浪力,从而开展不同浪级和浪向下航行体出水姿态的计算,计算结果表明波浪对航行体的影响主要包括波浪力和波浪水质点引起的流体俯仰力矩两个方面,高艇速下运动时需尽可能在低海情下发射;谷良贤等[16]采用波浪受力的切片理论,分别计算在线性波理论下和随机海浪P-M频谱下海浪对水平发射运载器出水弹道和出水姿态的影响,计算结果表明随机海浪干扰下出水姿态角服从高斯分布,线性波海浪干扰弹道设计较随机干扰的弹道设计相对保守;王亚东等[17]采用随机海浪P-M频谱和切片理论获得航行体所受波浪力,并采用蒙特卡洛方法分析随机海浪下航行体弹道偏差量统计值,表明海况越高,偏差量越大;王瑞臣等[18]利用LS-Dyna有限元软件对航行体进行离散化,研究了线性波海浪对导弹水下运动姿态的影响,计算结果表明浅水发射下波浪影响比深水发射更为明显。
在数值CFD计算方面,可通过数值仿真计算获取波浪影响下流场变化规律和航行体运动特性,其中气、水界面选用VOF模型、湍流模型选用标准模型,利用动网格技术、UDF技术可在CFD软件中实现航行体在波浪环境下运动的数值模拟。提取某典型工况下波谷、波峰出水时航行体周围流场流线图,如图5所示。
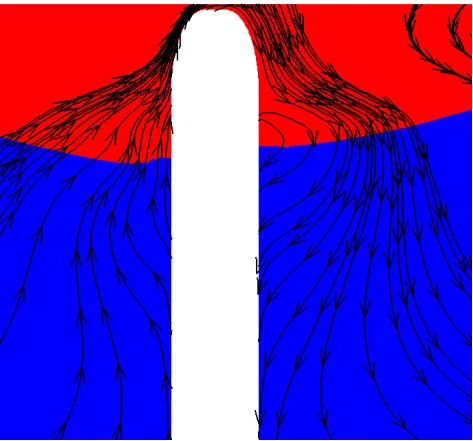
图5 航行体波谷、波峰出水时的流线
从图5可以看出,在波谷出水时,波浪水质点呈现回旋运动趋势,在水下流线向左侧运动,此时航行体受到的波浪力沿左侧方向,且由流线密集程度可以看出航行体头部流速较大,所受流体力也相对较大;波峰出水时航行体受力方向正好与波谷出水相反。
权晓波等[19]为了研究水下航行体出水过程中海浪的影响,首先通过源项造波法模拟出精度较高的二阶Stokes非定常数值海浪,之后考虑5级海浪干扰条件,分析钝头圆柱体航行体水下垂直发射时波浪对三维流场、弹道及受力特性的影响,并与无波浪条件下的分析结果进行对比,获得波浪对航行体运动速度变化的影响规律。针对更为复杂的带空泡航行体波浪影响问题,程闻等[20]采用源项造波法建立了二维数值水槽,采用动网格方法实现波浪环境下水翼运动时空泡非稳态特性的模拟,计算结果表明当水翼处于逆浪波谷状态时,波浪速度场方向与水翼空泡末端回射流方向相同,使得空泡断裂和脱落时间提前,且空泡脱落频率随波高增加而增加。朱坤等[21]通过数值CFD手段对不同波浪相位出水条件下带空泡航行体流场特性开展研究,获得了近水面波浪与潜射导弹空泡耦合流动机理,结果表明出水波浪相位的差异导致近水面流体质点剪切运动的强弱与方向是导致航行体肩空泡空间不对称的重要因素。
数值CFD计算方法通过对整个计算域内压力的分布特性开展计算,计算结果相对精细,且可实现对空泡流等复杂流动现象的准确模拟,是未来开展波浪对航行体出水过程研究的重要技术手段。
2.3 海浪环境下弹体运动特性的控制技术
航行体出水过程是在较短的时间内穿越自由界面过程,在自由界面附近波浪水质点运动速度较为剧烈,使得航行体表面各位置承受大小不等的波浪力作用,且由于受出水相位的影响,波浪力呈现出一定的随机性。波浪浪级越高,波浪力越大,从而给航行体结构载荷和弹道造成较大的影响,在高海情下垂直运动的航行体一般采用水下有控的技术方式。
由于航行体多为轴对称结构,纵向运动是其主要运动平面。在流体动力、重力、浮力、控制力作用下,航行体的速度和姿态不断发生变化。水下有控弹道在纵向平面的方程:
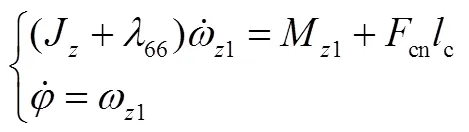
由水下航行体垂直发射特点可知:
a)航行体在水中航行体时由于尾空泡的周期性振荡导致难以准确建模;
b)在出水段随着航行体各截面出水急剧变化;
c)水下运动时间较短,对快速性要求较高;
d)控制力受限。

水下产生控制力的方式主要有推力矢量控制、栅格翼控制等。推力矢量控制方式主要是通过改变航行体发动机尾部喷流方向的方式控制导弹水下运动,可分为摆动喷管、扰流片、燃气舵、侧喷等具体实现方式。美国潜射战斧、法国飞鱼等导弹均采用水下推力矢量控制方式,其特点是依靠弹上发动机提供控制力来克服流体干扰力,在流体干扰力较大时对推力矢量特性设计要求较高。栅格翼控制方式是通过在航行体尾部安装栅格翼结构,从而使得压心后移,有利于提高恶劣海浪环境下弹道的稳定性。俄罗斯Club系列潜射导弹采用栅格翼控制方式,其特点是通过改变水动外形实现对流体干扰力的抑制作用,但需要增加栅格翼机构,导致水下阻力增大。
针对海浪非线性不确定外力,常用的控制方法有PID控制、最优控制、模糊变结构控制等。崔乃刚等[22]针对复杂海洋环境下潜射导弹出水问题,获得不同海浪参数影响下无控、PID控制以及模糊PID分段控制3种方法在不同海况下的仿真结果,丁彦超等[23]在“小扰动”假设条件下采用最优控制方法实现对垂直发射潜射导弹的推力矢量控制,仿真结果表明该控制方法可有效地抑制波浪对弹道的扰动影响。从各种控制方法上来看,弹体出水过程中流体动力变化剧烈且波浪干扰力具有较大的随机性,模糊变结构控制方法主要依赖当前弹道状态参数,对于复杂海浪下出水问题具有较好的适应性。
3 后续研究方向
a)随机海浪谱作用下航行体运动数值仿真研究。
数值仿真方法作为海浪研究的重要手段,其计算可信度相对较高,但对计算资源和工作时间要求也较高。目前对数值仿真中的波浪仍作为理想的规则波模型,对随机海浪谱特性下航行体数值仿真计算尚未涉及。可探索采用数值仿真和代理模型技术相结合的方法,建立波浪要素对航行体流体动力特征的理论预示模型,从而开展随机海浪谱下航行体影响数值仿真计算。
b)海浪对航行体出水结构动力学特性影响研究。
从势流理论上来看,海浪改变了航行体出水过程中的势函数,从而对附加质量等水下结构动力学参数造成一定的影响;另外,流固耦合现象、水弹性现象在波浪环境下呈现出新的特征,需要对其开展深入的研究。
c)真实海浪作用下航行体运动特性评估。
针对船舶等水面兵器在波浪环境运动特性的评估相对较为成熟,形成了较为完整的波浪载荷的时域和频域、耐波性设计等理论、试验手段。而针对潜射导弹、出水鱼雷等波浪影响评估理论相对较少,对波浪环境的适应能力尚需要借鉴船舶领域相关理念,实现对复杂波浪环境下航行体实际作战效能的有效评估。
[1] Clinton P S. Studying the effects of an ocean environment on the underwater launching of ballistic missile[M]. New York: Lockheed Missiles and Space Company, 1962.
[2] 郑帮涛. 潜射导弹出水过程水弹道及流体动力研究进展[J]. 导弹与航天运载技术, 2010(5): 8-11.
[3] 许富祥. 海浪预报现状与未来[J]. 海洋预报, 2005, 22(S1): 172-175.
[4] 管长龙. 我国海浪理论及预报研究的回顾与展望[J]. 青岛海洋大学学报(自然科学版), 2000, 30(4): 549-556.
[5] Jeans T L, Baker C R, Holloway A G, et al. A critical review of classical force estimation methods for streamlined underwater vehicles using experimental and CFD Data[C]. Houston: Proceedings of the ASME Fluid Engineering Division Summer Conference. 2005.
[6] Moran J P. The Vertical water-exit and entry of slender symmetric bodies[J]. Journal of the Arospace Science, 1964, 2(8): 803-812.
[7] Korvin-Kroukovsky B V. Investigation of ship motions in regular waves[M]. Washington: SNAME, 1955.
[8] 戴遗山, 段文杨. 船舶在波浪中运动的势流理论[M]. 北京: 国防工业出版社, 2008.
[9] 戴仰山, 沈进威, 宋竞正. 船舶波浪载荷[M]. 北京: 国防工业出版社, 2007.
[10] He W, Duan W. Fully nonlinear calculation of 2-D water wave generated by rocker flap wavemaker[J]. Journal of Hydrodynamic, 1996(1): 52-59.
[11] Finnegan W, Goggins J. Numerical simulation of linear water waves and wave-structure interaction[J]. Ocean Engineering, 2012(43): 23-31.
[12] Brorsen M, Larsen J. Source generation of nonlinear gavity waves with the boundary integral equation method[J]. Coastal Engineering, 1987(11): 93-113.
[13] Lee C, Yum C K. Internal generation of waves for extended boussinesq equations[J]. Coastal Engineering, 2001(42): 155-162.
[14] 齐鹏, 王永学. 三维数值波浪水池技术与应用[J]. 大连理工大学学报, 2003(6): 825-830.
[15] 杨继锋, 刘勇志, 刘丙杰, 等. 海浪对水下垂直运动航行体出水姿态的影响分析[J]. 海洋技术学报, 2015, 34(2): 59-63.
[16] 谷良贤, 李军政. 海浪对运载器姿态的影响研究[J].西北工业大学学报, 1997, 15(4): 523-527.
[17] 王亚东, 袁绪龙, 张宇文等. 波浪对导弹垂直发射水弹道影响研究[J].兵工学报, 2012, 33(5): 630-635.
[18] 王瑞臣. 海浪对导弹出水姿态影响数值分析[J]. 青岛大学学报(工程技术版), 2010, 25(1): 28-31.
[19] 权晓波, 孔德才, 李岩. 波浪模拟及其对水下航行体出水过程影响[J].哈尔滨工业大学学报, 2011, 43(3): 140-144.
[20] 程闻, 鲁传敬, 曹嘉怡. 波浪对水翼非稳态空泡流动特性的影响研究[J].水动力学研究与进展A辑, 2011, 26(6): 763-769.
[21] 朱坤, 陈焕龙, 刘乐华, 等. 波浪相位对航行体出水过程水动力特性的影响[J]. 兵工学报, 2014, 35(3): 355-361.
[22] 崔乃刚, 曹春泉, 韦常柱. 潜射导弹水下运动过程仿真分析[J]. 弹道学报, 2009, 21(2): 95-99.
[23] 丁彦超, 王宝寿. 垂直潜射导弹推力矢量控制弹道仿真研究[J]. 船舶力学, 2011, 15(1): 87-94.
Review of Wave Influence to the Water Exit for Underwater Vehicle
Zhou Jing-guo1, Quan Xiao-bo2, Cheng Shao-hua2
(1. Naval Equipment Department, Beijing, 100073; 2. Beijing Institute of Aerospace System Engineering, Beijing, 100076)
The marine environment had an important impact on the underwater vehicle during water exit, which was a hot topic in the current hydrodynamics research area. According to analyse the wave influence to the water exit for underwater vehicle. Some research results for the marine environment were introduced. Then calculate methods for underwater vehicle in the wave envorionment were summarized from three aspects, theoretical anaylsis, numerical simulation as well as underwater control. The fureture development and research direction were discussed.
Underwater vehicles; Ocean wave; Cavity
1004-7182(2016)03-0044-06
10.7654/j.issn.1004-7182.20160311
TJ762.4
A
2016-03-30
周敬国(1962-),男,高级工程师,主要从事水下航行体总体设计研究
猜你喜欢
学苑创造·A版(2022年4期)2022-06-18
幼儿园(2021年13期)2021-12-02
小读者(2021年2期)2021-11-23
疯狂英语·新读写(2021年6期)2021-08-05
儿童故事画报(2020年7期)2020-08-03
书香两岸(2020年3期)2020-06-29
小学科学(2020年6期)2020-06-22
阅读与作文(小学高年级版)(2020年3期)2020-03-02
当代陕西(2020年24期)2020-02-01
创新作文(1-2年级)(2017年7期)2017-12-26