基于最小二乘原理的天文定姿和定位方案
2016-10-14 14:01朱剑斌谭守林
导弹与航天运载技术 2016年3期
朱剑斌,谭守林,谭 飞,李 方
基于最小二乘原理的天文定姿和定位方案
朱剑斌1,谭守林1,谭 飞2,李 方3
(1. 第二炮兵工程大学906教研室,西安,710025;2. 第二炮兵装备部西安军事代表处,西安,710025;3. 第二炮兵工程大学图书馆,西安,710025)
针对弹载平台天文导航系统的应用,研究了基于最小二乘原理的天文导航方法。在天文定姿中,以大视场星敏感器为天文观测器件,研究了TRIAD方法和最小二乘定位法,仿真验证了最小二乘方法在充分利用多颗观测星的情况下定姿效果优于TRIAD法。在天文定位中,摒弃了传统的非线性滤波方法定位,以最小二乘微分矫正法实现了对导弹的纯数学解析定位,仿真实验证明最小二乘微分矫正定位方法以较小的运算量获得了优于纯惯导的定位精度。
弹道导弹最小二乘法;TRIAD;天文定位天文定姿
0 引 言
现代战争中,弹道导弹成为了具有超强进攻性和强大威慑力的武器。射击精度作为导弹武器的主要性能指标之一,很大程度上受制于所配备的导航系统。20世纪中叶,载人航天事业的发展极大促进了天文导航技术的现代化应用[1]。弹道导弹由于其运行轨迹的绝大部分位于大气层之外,为天文观测设备提供了良好的观测环境,弹载天文导航技术也得到了长足的发展。
本文针对弹载平台天文导航,研究了基于最小二乘原理的导弹天文定姿、定位技术。在航天器天文定姿技术中,有双星观测TRIAD算法[2]、多星观测Euler-q算法[3]和Quest算法[4]等。本文在大视场星敏感器的基础上研究了最小二乘法定姿,在仿真实验的基础上与TRIAD算法作了比较。在航天器天文定位技术中,传统方案有高度差法[3]、直接/间接敏感地平定位法[5]等。本文研究了文献[6]中提出的最小二乘微分矫正算法在导弹天文定位中的应用,并进行了仿真实验。
1 导弹天文定姿
1.1 TRIAD法定姿
TRIAD定姿法是一种简单高效的双星定位方法,只需要2颗观测星的信息。假设星敏感器坐标系与弹体坐标系b系重合,忽略星敏感器安装误差,则星敏感器观测到的恒星位置矢量便是弹体坐标系中恒星矢量。设弹体系中观测到2个不共线的恒星位置,单位矢量分别为1和2,在星历表中查询到其对应的惯性系i系中单位矢量分别为1*和2*。分别在2个坐标系中基于2个矢量构建正交坐标系如下:
(2)
是惯性系i与弹体坐标系b的姿态转换矩阵,由可以确定出导弹姿态角。
1.2 最小二乘法定姿
TRIAD法定姿,本质上是双星观测定姿。新一代大视场星敏感器可以同时观测到多颗恒星,如果能充分利用多颗观测星信息,在条件冗余情况下有望提高定姿精度。
假设星敏感器对某一天区瞬时成像,提取出颗恒星1,2,···,弹体坐标系b内位置坐标分别为(b1,b1,b1),(b2,b2,b2),···,(bn,bn,bn)。根据星历表识别出这些恒星对应的惯性系i中位置坐标分别为(i1,i1,i1),(i2,i2,i2),···,(in,in,in)。弹体系b的3个坐标轴b,b,b在惯性系i中指向分别为(X,Y,Z),(X,Y,Z)和(X,Y,Z),则有以下关系:

令
(5)

式(6)与式(3)本质相同,从数学上看是正定方程组。当>3时,为充分利用冗余的观测星信息提高测量精度,采用最小二乘法求解:
(7)
1.3 定姿算法仿真验证
文献[7]中设计了一种弹道导弹轨迹仿真器,利用其生成一条标准弹道,在标准弹道基础上进行定姿仿真。
轨迹仿真条件假设:
a)初始位置: 39.98°N, 116.34°E,高度为32.82 m,导弹向东垂直发射;
b)导弹垂直上升10 s,60 s时结束转弯,160 s时关闭发动机,所生成弹道如图1、图2所示。

图1 仿真弹道

图2 地球上三维弹道
在生成仿真弹道过程中,同时得到了导弹的理想速度、位置和姿态等数据。设某时刻导弹真实姿态对应的姿态矩阵为,星敏感器捕获到某恒星对应的惯性空间位置矢量为*,则在弹体坐标系中该恒星矢量为=∙*。实际中星敏感器存在测量误差,仿真中为模拟星敏感器实际观测值,将理想的星敏感器观测值加上量测噪声。
仿真所使用的星敏感器视场大小为8°×8°,CCD面阵大小为512×512,透镜焦距长度为98.8 mm,提取精度0.01个象元,像元宽、高均为27 mm。采用蒙特卡罗方法,随机生成星敏感器光轴的指向为(赤经96.735 42°,赤纬57.264 37°),视场内捕获到的恒星经星图识别后得到9颗恒星,其在天球坐标系下坐标如表1所示。
用Matlab软件进行TRIAD法和最小二乘法定姿编程仿真,设定仿真时间为400 s,星敏感器量测周期为0.4 s,得到1 000个仿真点,误差曲线如图3、图4所示。

表1 天球坐标系下恒星位置
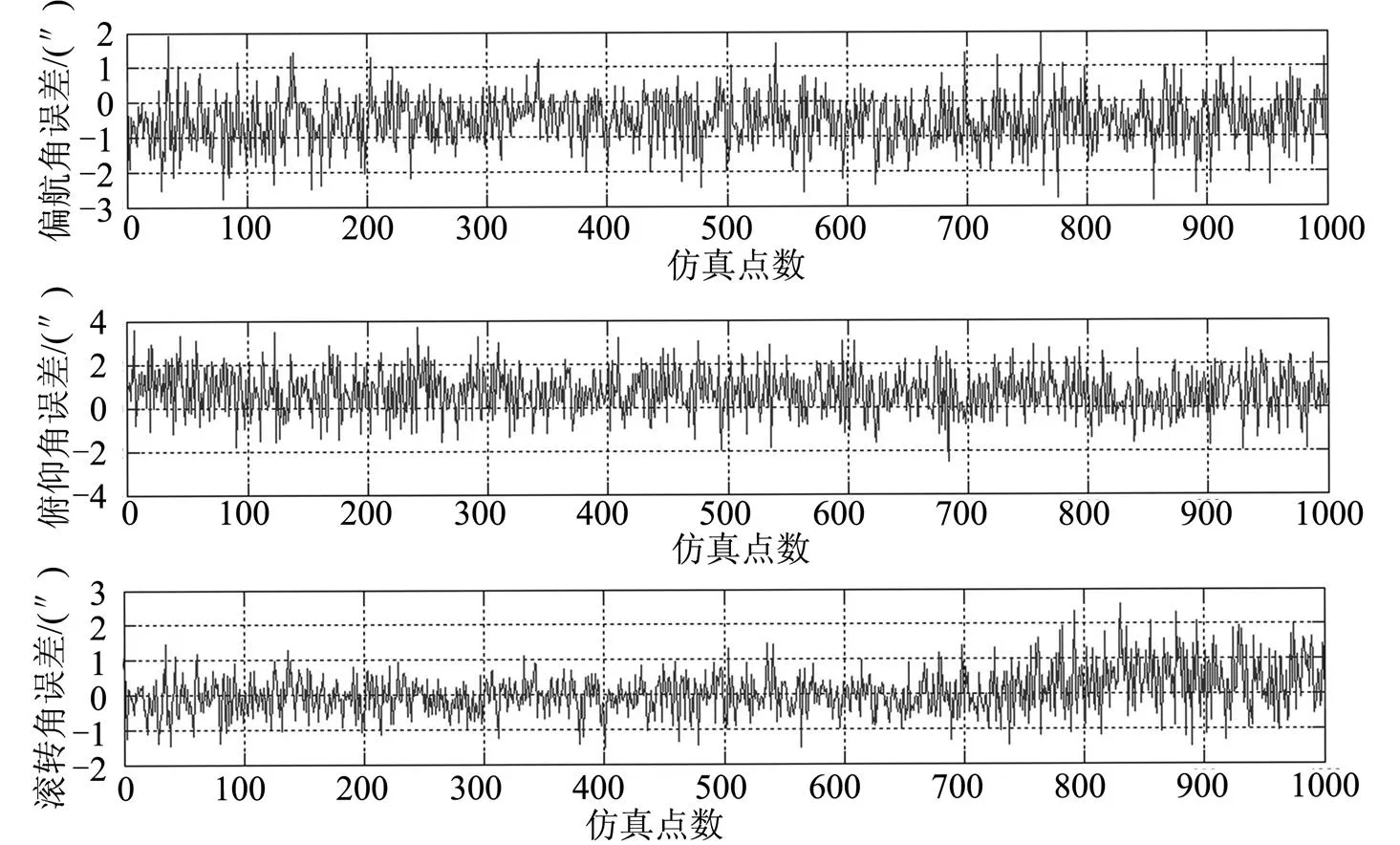
图3 TRIAD法定姿误差仿真
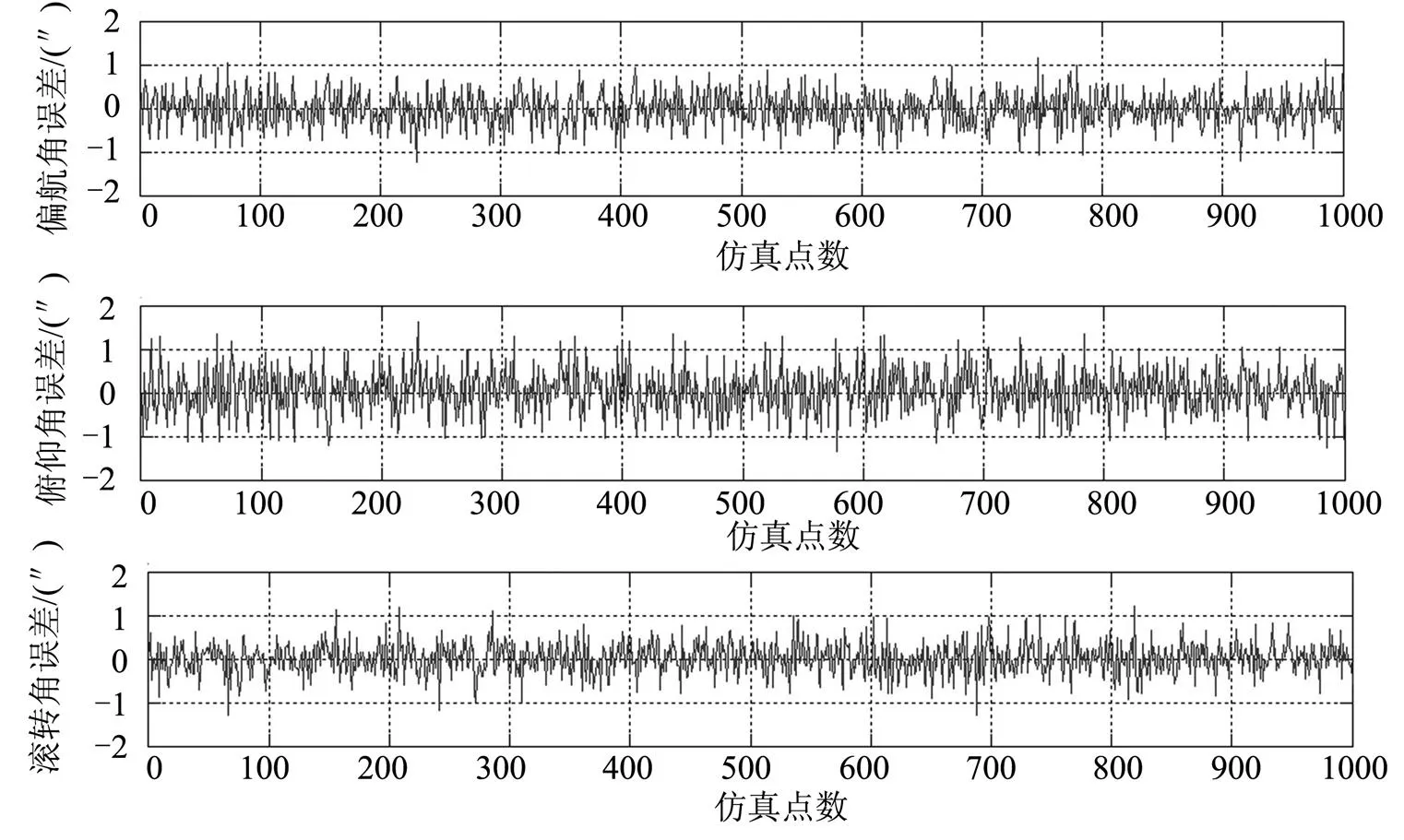
图4 最小二乘法定姿误差仿真
由图3、图4对比可看出,2种方法定姿精度都在角秒级别。TRIAD法对于偏航角定姿误差达到了2″,对于俯仰角定姿误差均值在1″左右,而对于滚转角的定姿误差在750 s以后略有增大,同样达到了2″。最小二乘法对3个姿态角的定姿误差都小于1″,精度略高于TRIAD法定姿,说明其充分利用所有观测恒星信息后定姿精度相较于仅利用双星信息的TRIAD法有所提高。
2 导弹天文定位
2.1 最小二乘微分矫正定位算法
传统的航天器天文自主定位方法主要有直接敏感地平的天文定位法和星光折射间接敏感地平的天文定位法。直接敏感地平定位法需要依靠惯导或地平仪等外部设备提供水平测量基准,技术成熟,但精度有限。星光间接敏感地平定位法通过建立基于航天器轨道动力学的状态方程和星光折射角量测方程,再利用非线性滤波的方法在线估计位置信息,精度较高,但是过程较为复杂。文献[7]中提出了一种基于最小二乘微分矫正法来获得非线性量测方程组解析解的天文定位方案。该法无需建立导弹动力学状态方程,仅利用星敏感器的多星观测数据建立量测方程组,通过量测方程组的求解即可获得导弹位置在最小二乘意义下的解析解。下面利用该法进行导弹天文定位:
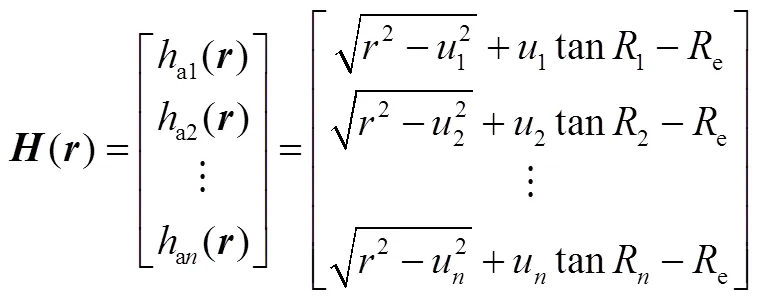
a)第1步:观测颗折射星,其位置矢量为s1,s2,…,sn,从而得到个折射视高度的观测值a1(),a2(),…,an(),并构成观测向量():
b)第2步:选取导弹初始位置矢量0,代入量测方程得到个折射视高度计算值a1(0),a2(0),…,an(0),并构成计算向量(0):

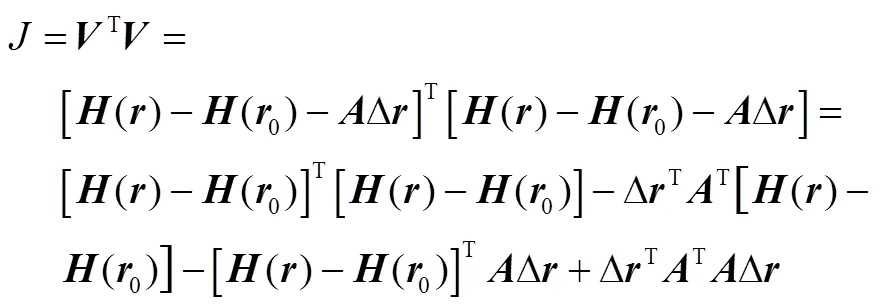
c)第3步:应用最小二乘微分矫正法,将观测方程组进行线性化。将观测向量在计算向量(0)处进行一阶泰勒展开:
(10)

式中
(12)
(13)
由式(13)可得以下正则方程:

(15)
e)第5步:根据所求微分矫正量对导弹位置进行修正:
2.2 定位算法仿真验证
文献[8]中提出了进行星光折射定位仿真所需的折射星观测数据的2种模拟构建方法。本文采用第1种方案,并假设弹载星敏感器对恒星一直保持良好的观测性,根据上文所建仿真弹道构造人造星场,模拟观测数据见表2,表2中所用坐标系为第1赤道坐标系。
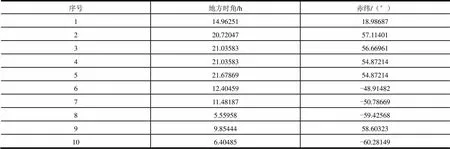
表2 模拟折射星观测数据
分别采用最小二乘微分矫正法和纯捷联惯性导航算法进行定位解算,星敏感器输出周期为0.4 s,惯性输出周期为0.01 s,总仿真时间1 000 s。星敏感器和惯性器件误差参数列于表3。
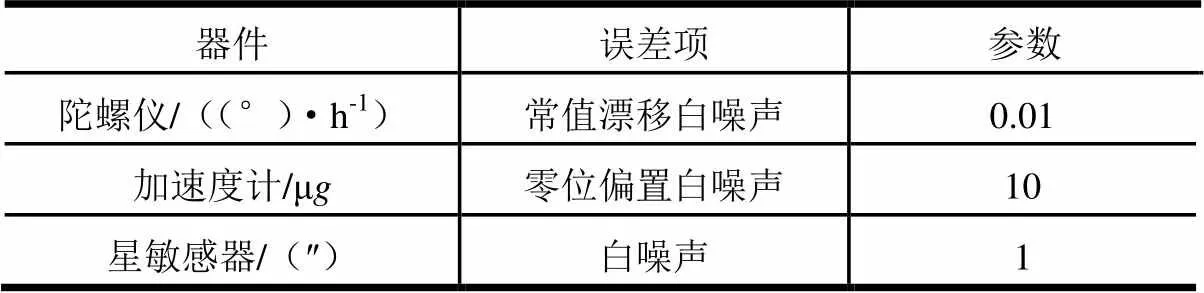
表3 导航器件误差参数
仿真结果如图5~10所示。

图5 惯导定位X方向位置误差
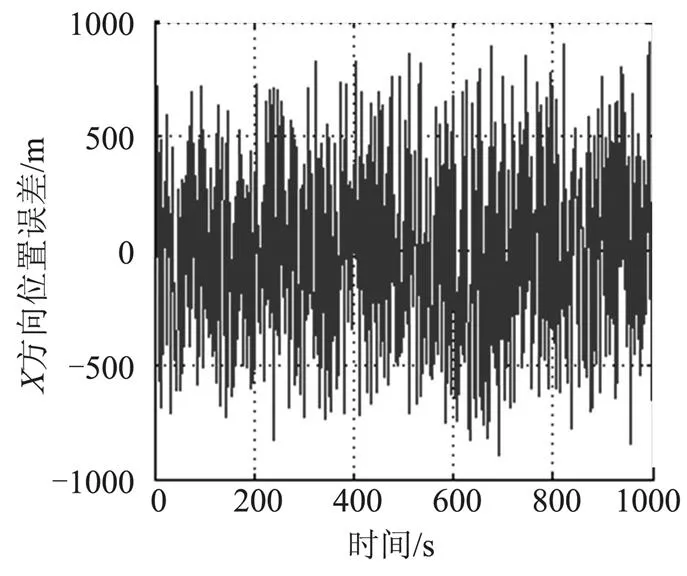
图6 天文定位X方向位置误差
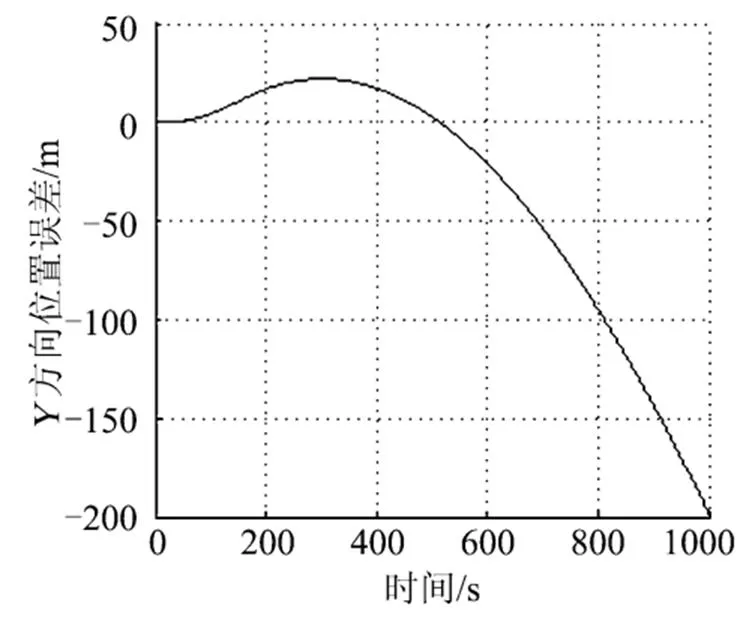
图7 惯导定位Y方向位置误差
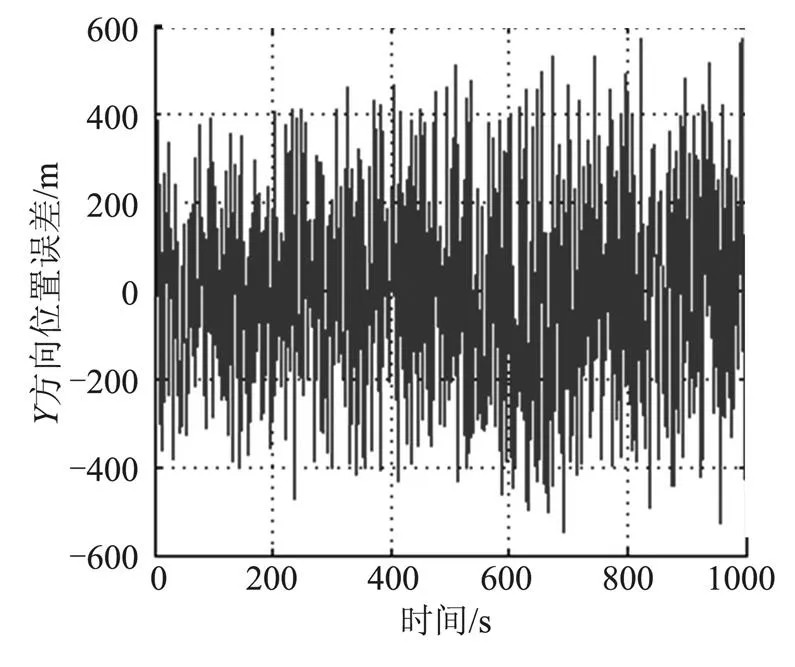
图8 天文定位Y方向位置误差

图9 惯导定位Z方向位置误差
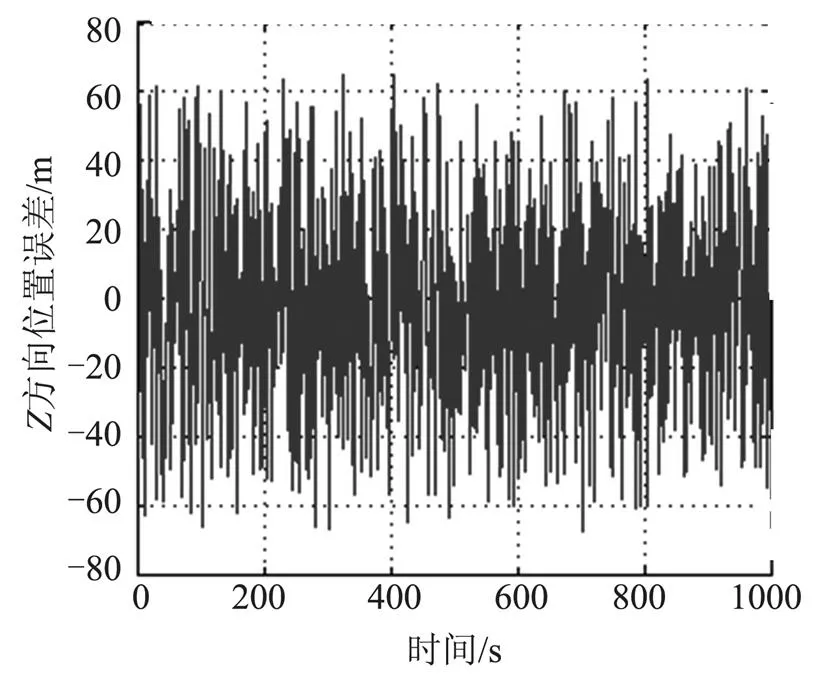
图10 天文定位Z方向位置误差
由图5~10对比可以得出以下结论:
a)敛散性。由于陀螺漂移和加速度计零位偏置的存在,纯惯性定位误差持续发散,而天文定位则显示出了较好的收敛性。
b)定位精度。在和方向运用了最小二乘微分矫正法的天文定位明显优于纯惯性定位,当仿真时间为1 000 s时,惯性定位方向误差达到了近5 000 m,方向达到了140 m左右,而天文定位的误差则分别缩小到方向误差为600 m左右,方向误差为40 m左右。天文定位相较于惯性定位在仿真时间内虽然方向误差没有明显提高,但从惯性定位向误差发散趋势来看,很快便会超过天文定位误差。
c)数据更新率。惯性导航体现出了绝对优势,而天文定位则受制于星敏感器的性能,数据更新率较低,不能连续输出。
3 结 论
最小二乘法作为一种基本的测量数据处理方法,在天文导航中有很好的用武之地,因为天文导航技术本身依靠星敏感器获得大量恒星观测数据。新一代大视场星敏感器能够同时观测多颗恒星,本文利用最小二乘法来处理这些多星观测数据,同时进行了定姿定位的算法研究。
针对定姿问题,将多星观测数据代入式(4)便获得了数学意义上的超定方程组,利用最小二乘法解之得到姿态矩阵,并在基于弹道导弹轨迹仿真器的仿真实验中验证了该姿态矩阵的精度优于传统双星定位姿态矩阵。
在定位问题求解中摒弃了传统的基于航天器轨道动力学的非线性滤波定位法,采用了文献[7]中提出的利用多星观测数据构造星光折射量测方程组,并利用最小二乘微分矫正法解之获得航天器在最小二乘意义下的位置解。在弹道导弹轨迹仿真器基础上,构造一组模拟星光折射量测数据,进行定位解算,获得了明显优于纯惯导的定位精度。
本文针对弹载平台的天文导航方法研究都是在理想情况下进行的,实际工程化背景下弹道导弹的工作环境复杂,对文中算法的应用存在着较大的制约。本文在定位和定姿的仿真实验中,弹道全程均利用同一组恒星数据,并在假设弹载星敏感器对折射星观测条件良好的情况下进行的仿真验证。实际中会存在选星问题,弹道全程利用同一组恒星观测数据不现实。下一步工作方向是加入一个更贴近实际的选星过程,来模拟实际弹道中不同位置和姿态,选取不同恒星观测数据。
[1] 房建成, 宁晓琳. 天文导航原理及应用[M]. 北京: 北京航空航天大学出版社, 2006.
[2] Shunster M D, Oh S D. Three-axis determinatnion from vector observation[J]. Journal of Guidance, Control, and Dynamics, 1981, 4(1) : 70-77.
[3] Mortari D. Euler-q algorithm for attitude determination from vector ob-servation[J]. Journal of Guidance, Control, and Dynamics, 1998, 21(2) : 245-334.
[4] Jamshaid A, Zhang C Y, Fang J C. An algorithm for astro-inertial navigation using CCD star sensors[J]. Aerospace Science and Technology, 2006(10): 449-454.
[5] 张承, 熊智, 王融, 等. 直接敏感地平的空天飞行器惯性/天文组合方法[J]. 中国空间科学技术. 2013(03): 64-71.
[6] 王新龙, 马闪. 高空长航时无人机高精度自主定位方法[J]. 航空学报, 2008(S1): 39-45.
[7] 敖宏奎, 王宏力, 侯青剑, 等. 弹道导弹轨迹发生器的设计[J]. 兵工自动化, 2007(08): 66-68.
[8] White R L, Gounley R B. Satellite autonomous navigation with SHAD[R]. The Charles Stark Draper Laboratory, Inc, Cambridge, Massachusetts, AD-A184-998, 1987.
Celestial Attitude and Position Determination Project Based onthe Least Square Theory
Zhu Jian-bin1, Tan Shou-lin1, Tan Fei2, Li Fang3
(1. 906 Lab, the Second Artillery Engineering University, Xi’an, 710025; 2. The Second Artillery Equipment Department, Military Representative Office of Xi’an, Xi’an 710025; 3. Library of the Second Artillery Engineering University, Xi’an, 710025)
Missile-born celestial navigation method based on the least square theory was researched in this paper. For celestial attitude determination, TRIAD algorithm and least square method was studied by using large field of view star sensor as the astronomical observation device. Simulation results showed that the precision of least square method using more information of observation stars was better than TRIAD algorithm. For celestial position determination, the least square differential correction method was used to replace the nonlinear Kalman filter. Simulation results showed that the localization precision of least square differential correction method with little amount of calculation was better than pure inertial navigation.
Ballistic missile least square method; TRIAD algorithm; Celestial localization and attitude determination
1004-7182(2016)03-0027-06
10.7654/j.issn.1004-7182.20160307
TJ765.3
A
2015-05-26;
2015-11-03
朱剑斌(1990-),男,硕士研究生,主要研究方向为飞行动力制导
猜你喜欢
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
中学生数理化·八年级物理人教版(2021年3期)2021-07-22
小学阅读指南·低年级版(2021年5期)2021-05-28
小哥白尼(神奇星球)(2021年11期)2021-03-08
小聪仔(科普版)(2020年12期)2021-01-18
百科探秘·航空航天(2018年12期)2018-12-29
奥秘(2018年10期)2018-10-25
广东第二课堂·小学(2017年2期)2017-02-20
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
中学生数理化·八年级物理人教版(2014年2期)2014-04-02