基于矢量水听器的MVDR水下近场噪声源定位方法研究
2016-11-09 06:35贾艳云陈宏宇
声学与电子工程 2016年2期
贾艳云 陈宏宇
(第七一五研究所,杭州,310023)
基于矢量水听器的MVDR水下近场噪声源定位方法研究
贾艳云 陈宏宇
(第七一五研究所,杭州,310023)
针对现有的聚焦波束形成技术在水下噪声源低频段近场定位识别研究上的不足,提出了基于矢量水听器的幅度-相位联合补偿的MVDR聚焦波束形成方法,提高了低频范围内的空间分辨率,能有效估算出噪声源的相对强度,进一步抑制背景噪声的干扰。仿真结果表明,该方法能够有效测出目标的噪声源相对空间位置分布及能量强度,为后续减振降噪提供理论依据。
近场噪声源;矢量水听器;MVDR;聚焦波束形成;幅度补偿;定位方法
潜艇的减振降噪是很热门的课题,要采取有效的减振降噪技术,有必要对潜艇的噪声源进行分析[1]。鉴于潜艇的体积庞大,且系统复杂,对潜艇的减振降噪不仅是对潜艇进行噪声测量和分析,了解潜艇的噪声特性,也要准确找出在其中起主要作用的噪声源,即噪声源的定位研究[2]。由目前所知潜艇噪声特性,潜艇的辐射噪声主要分布在低频段(20~1000 Hz),尤其在低航速行驶下,100 Hz左右频段有很强的线谱噪声能量[3]。因此,研究在低频段如何得到更好的空间分辨率和潜艇噪声源的能量分布是潜艇近场噪声源定位方法研究的关键。
以往的研究中,通常是在声压水听器组成的阵列基础上利用最小方差信号无畸变响应 (Minim um Variance Distortionless Response,以下称为MVDR)算法进行近场噪声源的定位研究。MVDR是在保证波束指向方向上信号输出功率不变的前提条件下,抑制(或干扰)其他方向波束输出功率。在水下噪声源定位研究中,利用MVDR算法通过相位补偿可实现定位[4],但无法给出系统噪声源的能量强度,且在低频段空间分辨率较差。因此,本文提出基于矢量水听器的幅度-相位联合补偿的聚焦波束形成技术。
矢量水听器由传统的声压水听器和质点振速水听器复合而成,可以测量声场空间某一点处的声压和质点振速的三个正交分量,具有良好的低频指向性和较强的各向同性噪声抑制能力等优点[5],将矢量水听器技术引入聚焦波束形成算法中,能够有效地提高在低频段的空间分辨率,再根据球面波传播规律,给出水下近场噪声源定位的幅度和相位,并进行联合补偿,据此可以得到噪声源低频段的空间相对位置和能量分布。
1 近场阵列噪声源测量模型
本文中近场聚焦波束形成的基本原理是根据声源到达水听器阵列的各个阵元曲率半径不同,按球面波传播规律对阵列接收数据进行相位补偿及幅度补偿,根据阵列与噪声源的空间位置重建测量平面,得到重建测量平面上目标的空间位置分布和强度,实现噪声源的定位研究,以均匀矢量水听器阵列建立噪声源测量模型。如图1所示,平面为噪声源分布平面,假设噪声从平面发出,主要分析平面的噪声源空间分布情况。模型中位于空间轴x上有均匀水平线阵,线阵上有M个矢量水听器阵元,一号阵元位于坐标系原点,设为参考阵元。m号水听器的坐标为,阵元间距为d,线阵与噪声源平面的距离为z0。
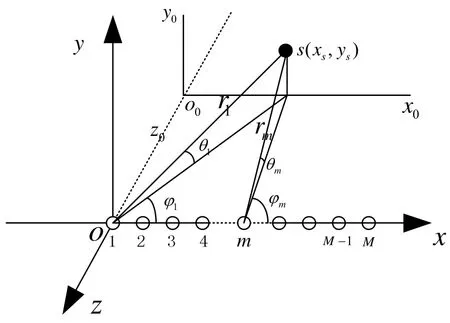
图1 均匀线阵水下近场噪声源测量模型
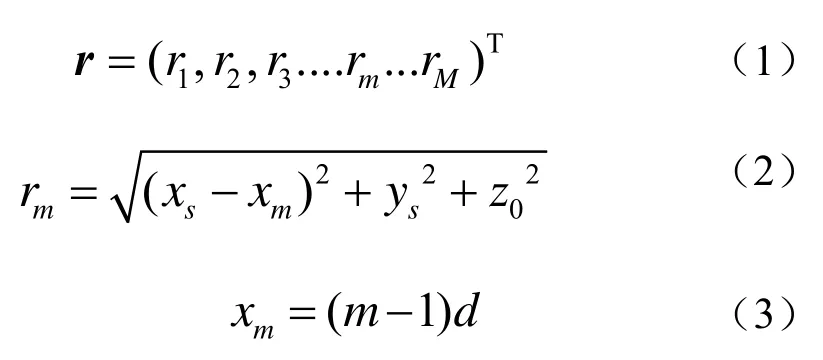
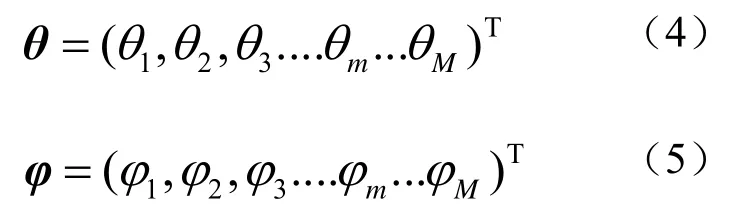
其中,xm表示m水听器阵元到参考阵元的距离,rm表示噪声源s到第m号阵元的距离。声源俯仰角矢量矩阵和声源方位角矢量矩阵θ、φ为:

假设噪声源s发射信号频率为f的单频信号,背景噪声为高斯白噪声,则第m号矢量水听器接收的信号Pm可以表示为:

A表示矢量水听器基阵的阵列流形,um表示矢量水听器的方向矢量,b表示线阵列的方向矢量。由式(17)可知,在近场聚焦波束形成算法中,基阵接收到的信号幅度和相位都不一致,因此在信号处理中需要进行幅度-相位联合补偿。
2 MVDR近场聚焦波束形成算法
2.1MVDR近场聚焦波束形成
最小方差信号无畸变响应是在保证波束指向方向上信号的输出功率不变的前提条件下,抑制(或干扰)其他方向波束输出功率,即在干扰方向形成零陷,其主要针对窄带信号,能够保证目标信号正确接收,且有效地抑制其他方向的信号或噪声,具有比较好的分辨率[4]。
由远场MVDR相关知识可知,MVDR近场聚焦波束形成相当于求解如下优化问题:

其中,W为加权向量,a(x,y)是扫描点相对于基阵的相位补偿向量:
利用拉格朗日常数法可对式(20)进行求解,得到最佳权值向量:

则MVDR聚焦波束形成空间谱函数为

在实际应用中目标信号方向并不知道,故在扫描时可通过基于相位补偿的近场聚焦波束形成得到其MVDR功率谱。
2.2幅度-相位联合补偿MVDR近场聚焦波束形成
由公式(17)可知,在近场聚焦波束形成算法中,基阵接收到的信号幅度和相位都不一致,因此在信号处理中需要进行幅度-相位联合补偿,才能给出噪声源的空间位置分布和相对能量分布。
由远场MVDR相关知识可知,MVDR近场聚焦波束形成相当于求解如下优化问题:
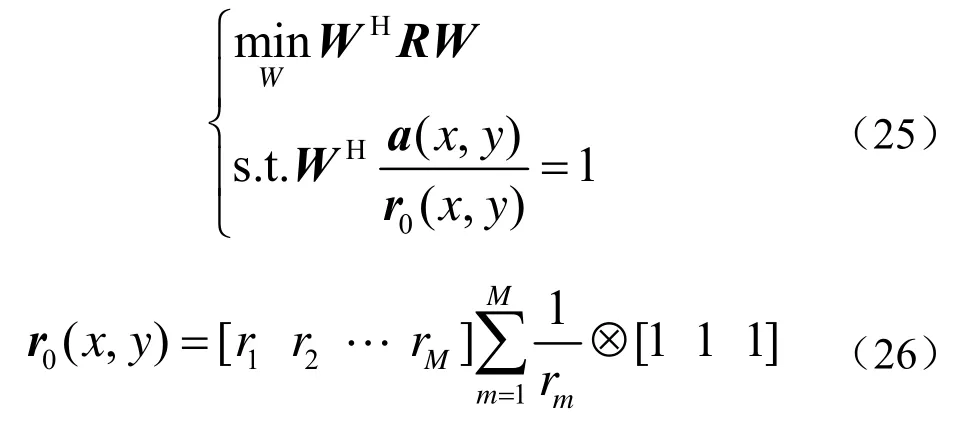
式中,r0(x,y)表示噪声源面上的点相对于矢量阵的归一化幅度补偿矩阵,利用拉格朗日常数法可对式(25)进行求解,得到最佳权值向量:
则MVDR聚焦波束形成空间谱函数为

根据声源到达水听器阵列的各个阵元曲率半径不同,按照球面波传播规律对阵列接收数据进行幅度-相位联合补偿,利用上述算法给出噪声源的空间位置分布和强度分布。
3 仿真实验
仿真条件:矢量水听器组成均匀水平线阵,阵元数为24,阵列孔径为1 m,声速为1500 m/s,噪声源平面距线列阵3 m的距离,噪声源位置(6 m,14 m),扫描范围x轴为-10~10 m,y轴为10~30 m,步长为0.2 m,快拍数为1024,采样频率为30 kHz,噪声为高斯白噪声。信噪比为24 dB,噪声源频率分别为100 Hz、1000 Hz、3000 Hz,结果如图2~图7所示。
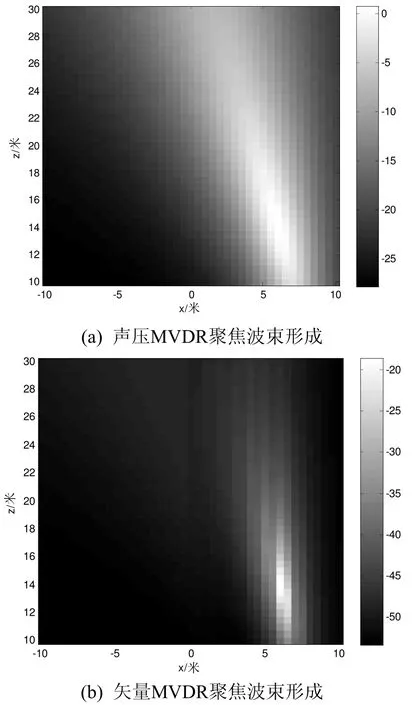
图2 f=100 Hz时仅相位补偿MVDR聚焦波束形成
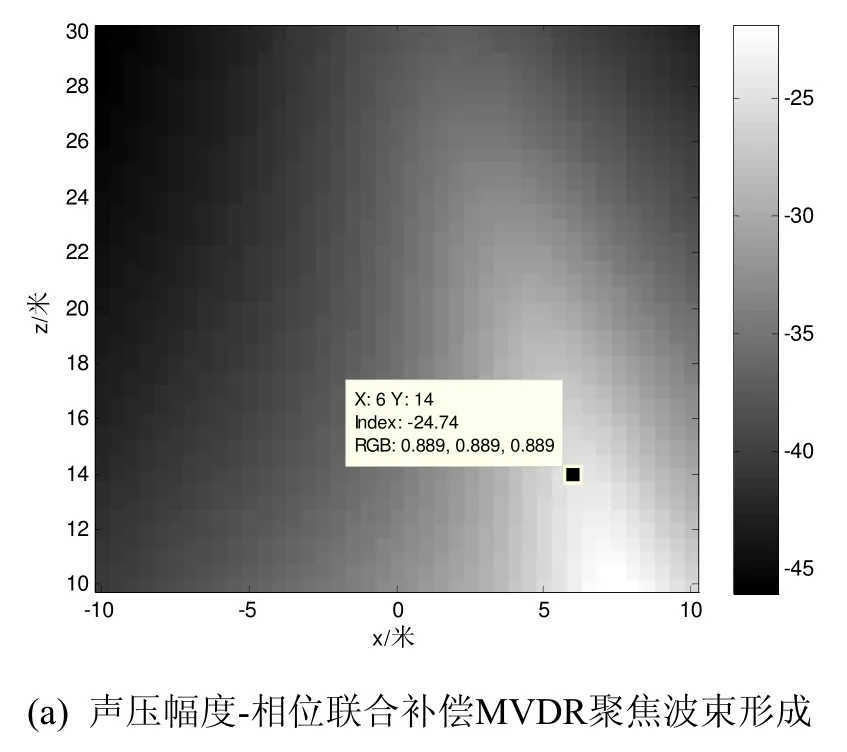
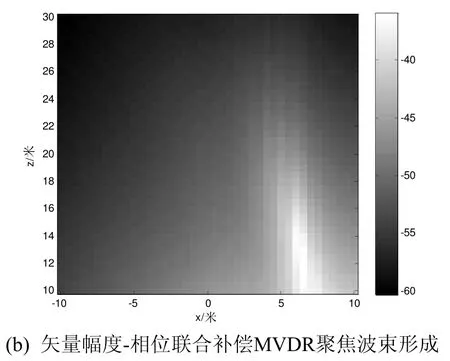
图3 f=100 Hz 时幅度相位补偿MVDR聚焦波束形成
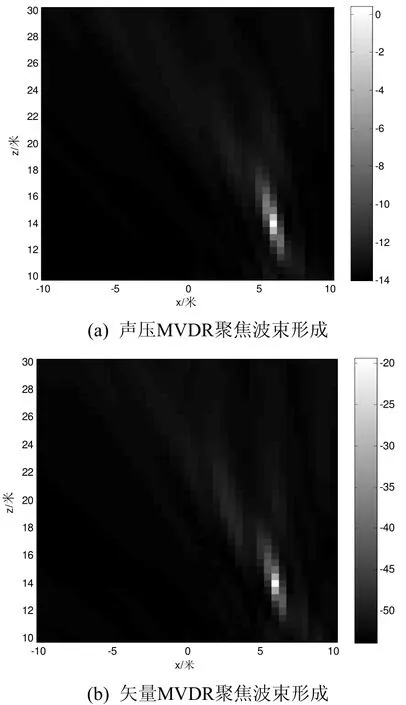
图4 f=1000 Hz 时仅相位补偿MVDR聚焦波束形成
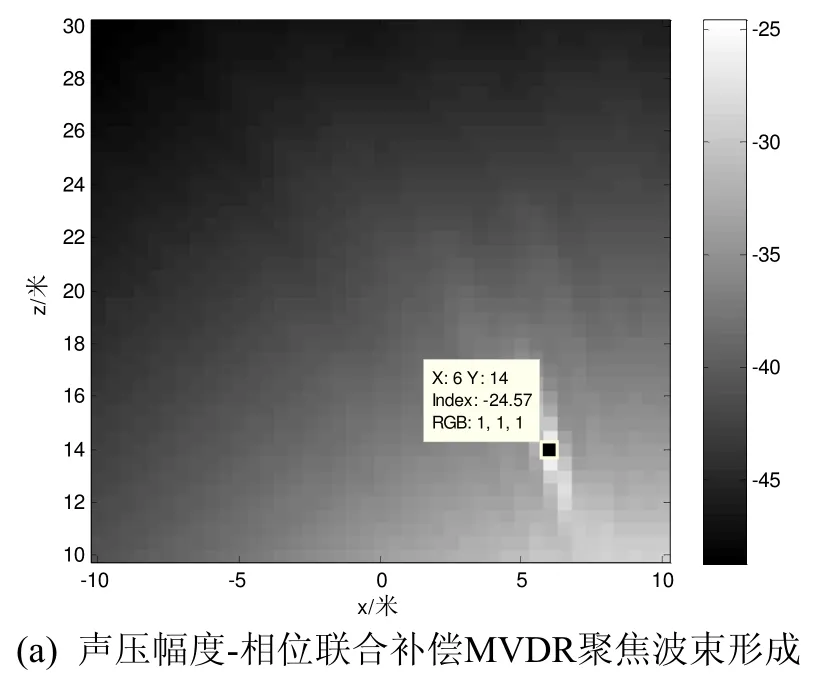
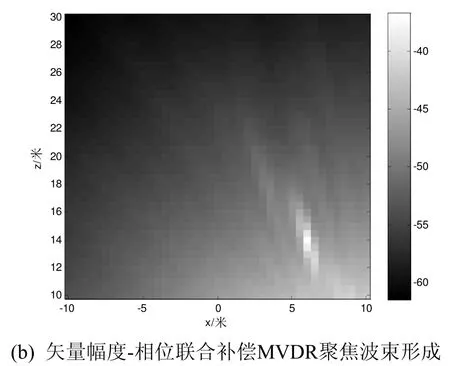
图5 f=1000 Hz 时幅度相位补偿MVDR聚焦波束形成
图6 f=3000 Hz 时仅相位补偿MVDR聚焦波束形成
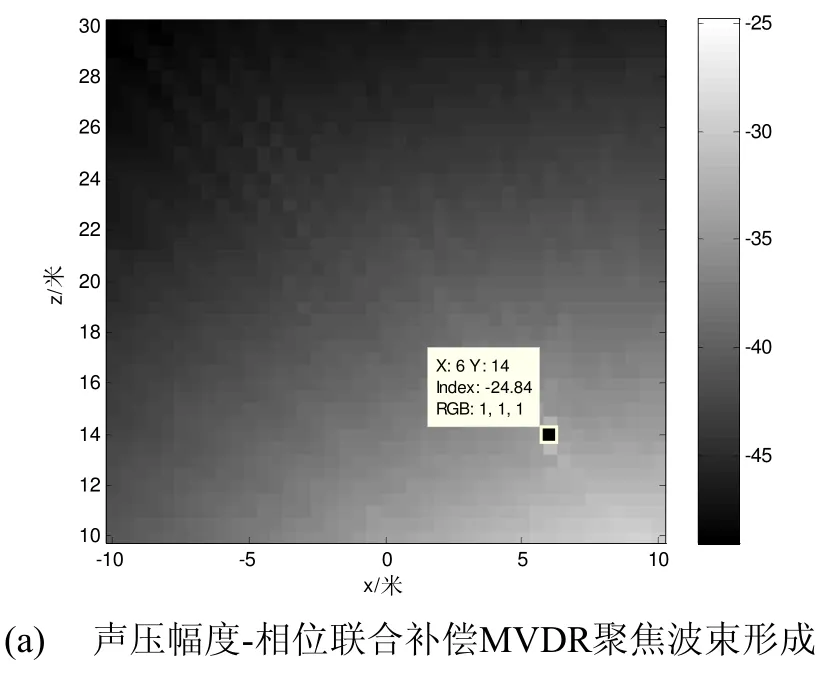
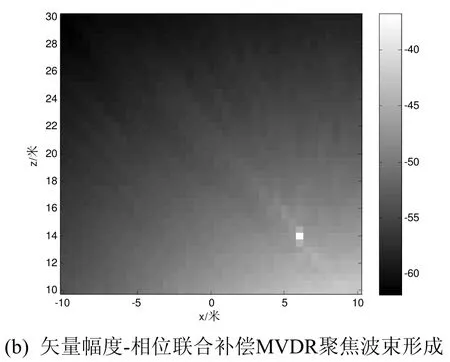
图7 f=3000 Hz 时幅度相位补偿MVDR聚焦波束形成
先利用矢量水听器声压输出作声压的MVDR聚焦波束形成算法仿真,再利用矢量水听器声压与振速的联合输出作矢量的MVDR聚焦波束形成算法仿真。对比分析图2、图4、图6可知,基于矢量水听器技术的聚焦波束形成的噪声源空间分辨率好于声压的聚焦波束形成。尤其是噪声源频率在100 Hz情况下,声压MVDR聚焦波束形成很难分辨出噪声源的位置,而矢量MVDR聚焦波束形成依然可以分辨,验证了基于矢量水听器技术的MVDR聚焦波束形成在低频段空间分辨率优于传统的声压水听器技术。从图3、图5、图7中的(a)图中的标记可看出,利用幅度-相位的联合补偿可较准确的得出噪声源的能量强度。对图2、图3分析,在低频段,基于矢量和声压的MVDR聚焦波束形成算法的空间分辨率相对于高频时段都有明显的下降,而采用幅度-相位联合补偿的MVDR聚焦波束形成算法空间分辨率在低频段有明显的提升。
4 结束语
本文提出了基于矢量水听器的近场MVDR聚焦波束形成方法,并进行幅度-相位联合补偿的算法研究,最后进行实验仿真。仿真结果表明,在低频段,基于矢量水听器技术的MVDR聚焦波束形成算法,空间分辨率明显好于传统的声压水听器技术,利用幅度-相位联合补偿算法,不仅能在低频段提高空间分辨率,而且可以有效地测量噪声源的能量强度。但本文方法在多目标噪声源定位算法中还有待进一步研究。
[1] SHI JIE,LIU BOSHENG,SONG HAIYAN. Radiated noise sources location based on MVDR near-field focused beamforming[J].IEEE Trans. On Signal Processing,2008,34(3):55-58.
[2] 陈欢. 直线阵潜艇噪声源高分辨定位识别方法研究[D].哈尔滨工程大学,2011.
[3] 梅继丹,惠俊英,惠娟. 水平阵聚焦波束形成声图定位算法研究[J].哈尔滨工程大学学报,2007,28(7):773-778.
[4] 王永良,陈辉,彭应宁,等. 空间谱估计理论与算法[M].北京: 清华大学出版社,2005:98-108.
[5] 吕钱浩.矢量传感器阵列技术研究[D]. 哈尔滨工程大学,2004.
猜你喜欢
电声技术(2022年3期)2022-04-28
汽车工程(2021年12期)2021-03-08
成都信息工程大学学报(2021年6期)2021-02-12
合肥工业大学学报(自然科学版)(2020年11期)2020-12-05
应用科技(2020年1期)2020-06-18
探索科学(学术版)(2019年5期)2019-07-13
中国测试(2018年10期)2018-11-17
制导与引信(2016年3期)2016-03-20
雷达与对抗(2015年3期)2015-12-09
声学技术(2014年1期)2014-06-21