基于长基线水声定位系统误差分析以及定位精度研究
2016-11-09 06:35孙微王方勇乔钢周彬
声学与电子工程 2016年2期
孙微王方勇乔钢周彬
(1.声纳技术重点实验室 第七一五研究所,杭州,310023)
(2.哈尔滨工程大学水声学院,哈尔滨,150001)
基于长基线水声定位系统误差分析以及定位精度研究
孙微1王方勇1乔钢2周彬1
(1.声纳技术重点实验室 第七一五研究所,杭州,310023)
(2.哈尔滨工程大学水声学院,哈尔滨,150001)
分析影响定位精度的测距误差、潜标位置偏移、声线弯曲、目标移动等。仿真了不同测距误差以及不同潜标偏移误差下整个区域内不同位置的定位精度,对声线曲率进行了修正并仿真了等效声速剖面与实际声速剖面声速对定位精度的影响。在一定区域内,存在以高斯分布的测距误差,中心位置定位精度最高,定位误差起伏较小,以中心向外辐射,距离中心越远的区域定位精度越低起伏越大;当潜标存在偏移误差时,真实测距值与偏移测距值之差为双曲线,双曲线焦点为潜标真实位置和潜标偏移位置,目标在焦点的中垂线上时,测距误差最小;利用等效剖面法有效的改善了声速变化对定位的影响;运动目标的定位结果具有与目标运动方向偏离的趋势。
水声定位;长基线;误差分析;定位精度
长基线定位系统是指基线长度可与海深相比拟的定位系统,定位原理可以理解为通过时间测量得到距离从而解算目标位置的定位系统。定位精度受辅助传感器、外部GPS定位系统、声学定位系统精度和数据后置处理方法的影响[1]。为了达到水声定位系统的定位精度,需对误差进行修正。以长基线水声定位系统为例,在定位解算的过程中,如果不考虑公式带来的误差,定位误差会随着距离的增大而增大,导致有效定位距离受到限制,最终影响水声定位系统的应用。基阵安装误差可通过预先校准降低,声速变化也会给定位结果带来很大的误差。声学定位系统的定位误差总结起来可分为:测量误差、声速误差、潜标位置偏移误差等。
1 定位误差模型
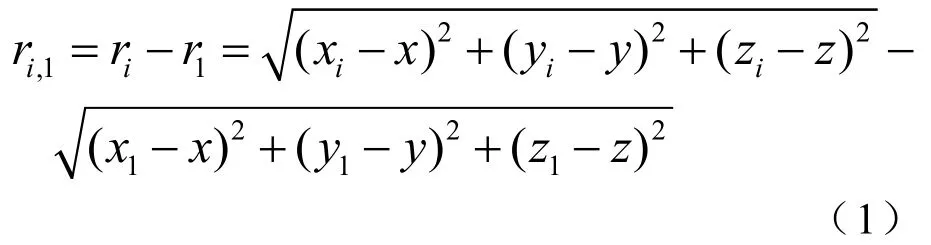
综合考虑各项误差对定位精度的影响,建立定位误差模型。由4个潜标和一个移动目标组成水声定位系统,潜标布置成正方形,并且潜标和移动目标采用非同步工作方式。定位采用双曲线定位原理[2],定位方程如式(1)所示,深度由目标上装的深度计测得。
对式(1)两边进行微分,整理得:
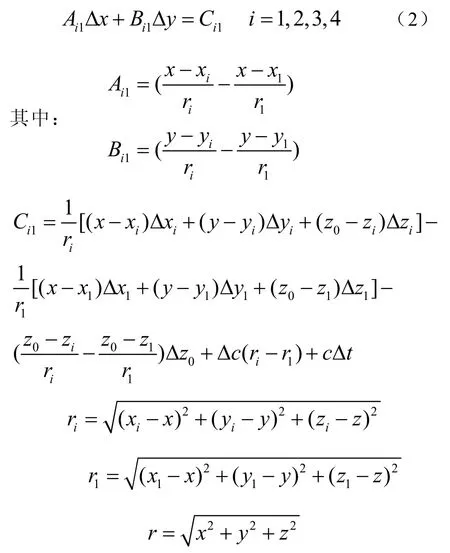
为了求解直观,将式(2)写成如下形式:
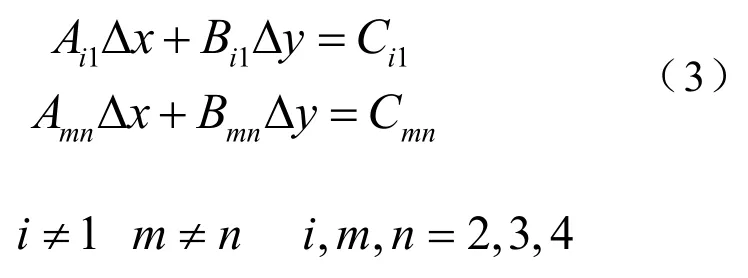
从式(3)得出优化误差分布情况:
式(4)是定位误差模型。模型中包括声速变化带来的误差、测时误差和潜标位置偏移误差。从图1中的仿真结果可以看出:随着TDOA定位误差的增大,定位均方根误差也不再不断增大;相同定位误差下,潜标节点个数越多,定位均方根误差越小即定位精度越高。
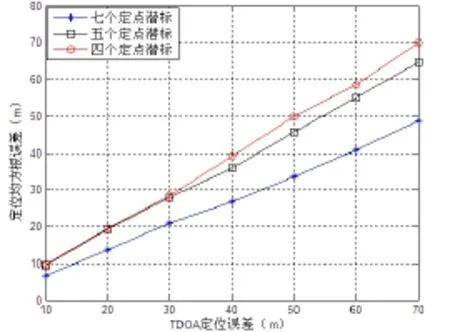
图1 定位误差
2 定位精度分析
2.1测时误差对定位精度的影响
时延估计误差主要由时延估计和水声信道多途引起的。水声信道本身是一个相干多途信道,多途效应是影响水声定位信号处理的主要因素之一,由于水面水底等反射系数较强的介质会产生较强的多途回波,该回波在接收处掺杂在目标信号中,严重影响了信号直达声的检测,可以利用时反技术抑制多途来提高定位精度,对于深海可以忽略水面海底等发射带来的多途问题。
在移动目标和潜标系统不同步时,可以利用双曲线进行解算,需要测量时间差。距离表示为,是声速c和传播时间t复合的函数:。我们一般取R=ct,那么。Δc和Δt分别为声速测量误差和系统误差。假设声速不发生变化(测声速仪器测量误差一般都小于0.1 m/s,Δc对各个潜标基本一致),忽略声速带来的影响。当测时误差起主要作用时,利用测时延差方法可以抵消时间不同步带来的误差,可以提高系统定位精度[3]。随机测时误差是影响定位精度的因素之一,通过仿真,假设定位系统不存在其它误差因素,仅具体分析随机测距误差对定位精度的影响。
仿真实验1:4只潜标深度相同,计算200 km×200 km范围内各点的定位精度,扫点间隔为200 m。4只潜标成正方形布放,边长为100 km,布放深度4 km。目标深度4.1 km,随机测距误差服从均值为0、标准差为10 m的标准正态分布,统计次数1 000次。从图2中可以看出:(1)4只潜标的中心定位精度最高,以中心向外辐射,距离中心越远的区域定位精度越低;(2)4只潜标的中心定位误差在中心点起伏最小,以中心向外辐射,距离中心越远的区域定位误差起伏越大。

图2 随机测距误差对各点定位精度的影响
2.2潜标位置偏移对定位误差的影响
潜标位置受到海水冲击影响,位置发生偏移,也就是x-y坐标系的摇动,对x、y方向的定位精度影响很小,可以忽略。潜标在水平面的移动表现为x-y坐标系的移动,直接影响x、y方向精度,见图3。
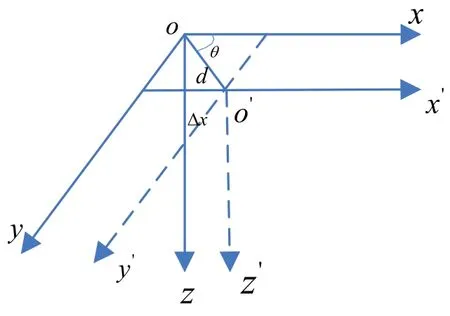
图3 潜标换能器偏移示意图
图3中以浮标为参考中心,o为浮标中心,o’为潜标中心,两者间的距离为d,显然潜标移动只是坐标系的移动[4]。潜标漂移引起的误差由下式进行修正:

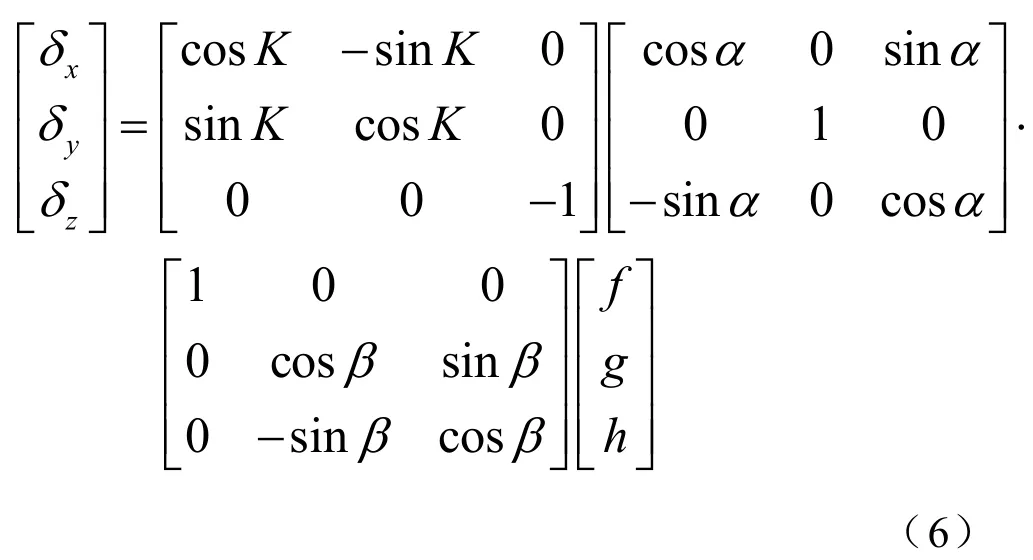
而实际情况中,潜标中心和浮标中心既不重合也可能不在一个平面上,两者的距离连线是一条空间直线。假设它在空间直角坐标系下的三个分量分别是f、g、h,设其航向角为K、纵倾角为α、横摇角为β时,基阵坐标修正应按(6)计算。
仿真实验2:假设单个潜标存在偏移误差,4只潜标正方形布放,布放深度4 km,目标深度4.1 km。无测时误差,1号潜标分别存在东向的100 m误差、东向-100 m误差,东北向100 m误差、北向100 m误差,计算200 km×200 km范围内各点的定位精度。仿真结果图4中,黑色线表示该点处目标偏离真实位置的趋势,星号为含有误差的定位结果,另一端为目标真实位置,线段长度表示偏离真值的距离幅度,能够清晰表示偏离方向。从图4中可以看出当单一潜标单一方向偏移时定位精度向着潜标偏移方向移动,偏移越大,定位误差越大,整个区域不同位置定位误差不同,定位误差趋势与潜标偏移方向有关。
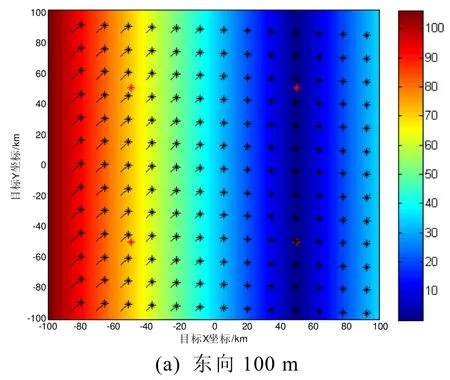
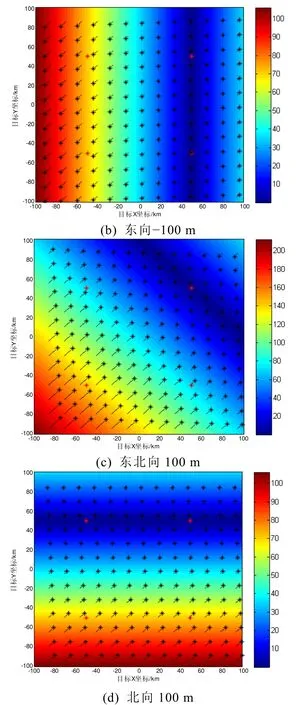
图4 单个潜标偏移误差对各点定位精度的影响
仿真实验3:单个潜标存在偏移误差时分析该潜标的测距误差。其中一个潜标存在东向100 m的水平误差,并且设真实位置为(-50,0),标定坐标为(50,0),深度4.1 km,目标深度4 km,目标分别在水平面200 km×200 km和4 km×4 km的范围内运动,扫描平面内潜标1号对目标的测距误差。测距误差=目标距真实潜标的距离 -目标距偏移潜标的距离。从图5中可得到仿真结论:(1)当潜标存在偏移误差时,真实测距值与偏移测距值之差为双曲线,双曲线焦点为潜标真实位置和潜标偏移位置;(2)目标在焦点的中垂线上时,测距误差最小。
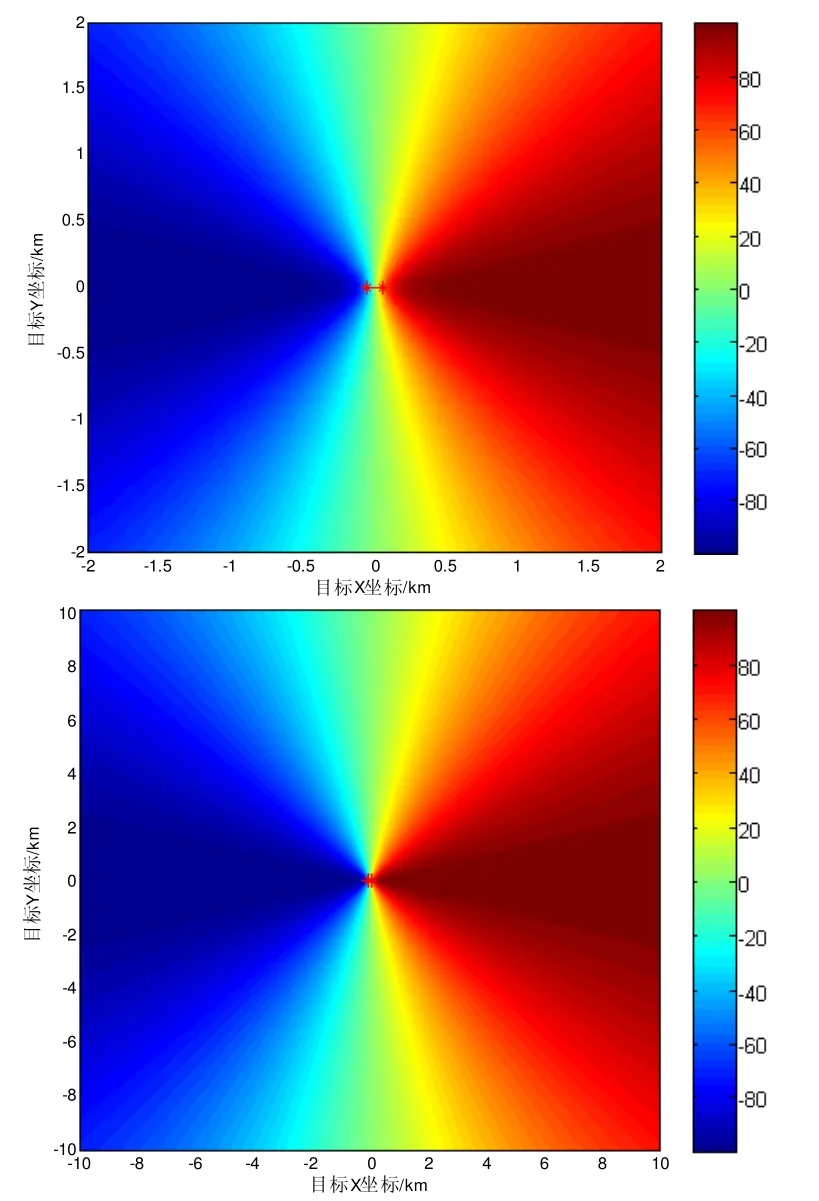
图5 单个潜标偏移误差对测距误差的影响
2.3声线曲率修正
声速修正可以采用基于层追加的常声速声线跟踪法和常梯度声线跟踪法。本征声线具有不同的运动轨迹,因此声速传播路径不同,则到达时间也不同,所以声速不能认为是一个常数。也就说在水声定位系统中,由于海水中不同深度声速变化速度不同,以至于声线产生弯曲,声速不是常值。可见要达到很高的定位精度,就必须修正声线曲率。建立一个直角坐标系,x坐标轴平行于海平面,y坐标轴垂直于海底。将海域按深度进行分层,假设声速梯度Gc为常数。图6中α0是声射线折射角,φ0是入射线与海平面夹角,每层中的声速分别为cj(j=1,2,3,4)。可得:

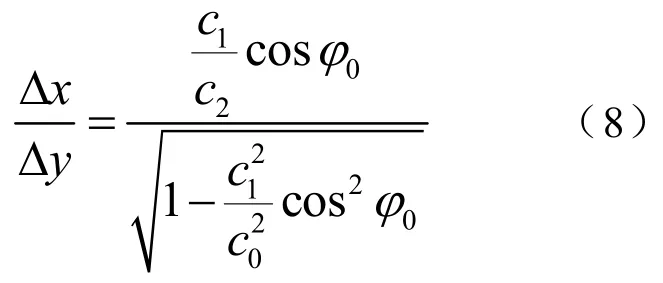
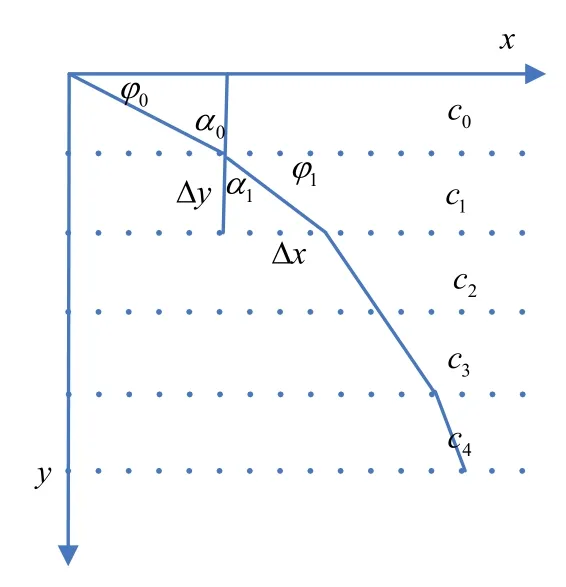
图6 声线修正
分层声速值c(z)的公式:


假设每层很小,公式(10)对x进行积分,可得:


式中ε为弦切角,如图7所示。
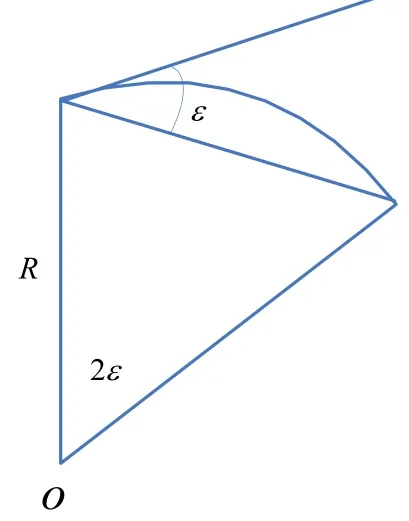
图7 声线修正
2.4声速剖面对定位的影响
仿真实验4:扫描无反转声线可达范围内的定位精度。4只信标四边形布放,布放深度4 km,目标深度4.1 km。真实声速剖面如图8。
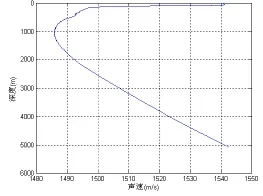
图8 真实声速剖面图
根据图8中的真实声速剖面进行声速跟踪,它是建立在声速剖面基础上的一种波束脚印(投射点)相对船体坐标系的计算方法。不考虑声线反转的情况,声速跟踪采用分层计算,也就是将相邻的两个声速之间分一个层,在这一层内的声速梯度可以假设为常数或者为零。当声速梯度为常数进行声线跟踪时,用Harmonic平均声速来表示声速变化。假设声波束经过N个不同层的水柱,不同层之间的声速梯度用gi来表示,声速变化函数用来表示,见图9。
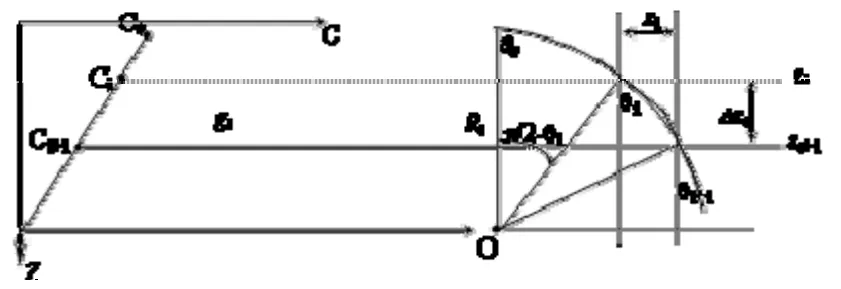
图9 声速梯度不为零时声速跟踪计算图

声线跟踪过程:
(1)先进行曲率修正,然后由声速剖面(或声速经验公式)获得声速函数c(z)。
(2)从换能器表面开始追加水层,求波束在每层中的传播时间ti和在目标坐标系下的水平位移量yi。
(3)用累加每层传播时间ti同实测时间T比较,然后根据下列条件判断是否完成追踪。
无反转声线可定位跟踪范围如图10所示,蓝色区域为无效区域,红色区域为可定位跟踪区域。
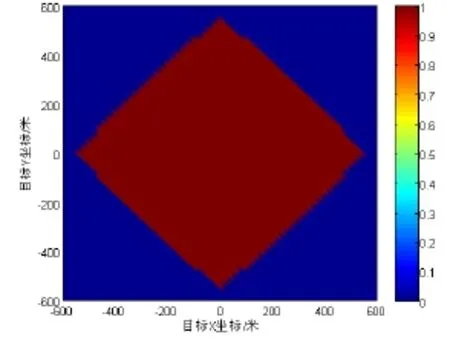
图10 声速剖面有效跟踪范围(无声线反转)
利用接收点声速来计算测距信息和利用等效剖面法来计算测距信息的两种情况,目标定位精度如图11。由图11和图12可以看出在一定区域内各点定位精度都是由等效剖面方法定位精度要高于利用接收点声速的方法。但是以上只是仿真了声速不发生变化的情况,对于声速发生变化情况较复杂。
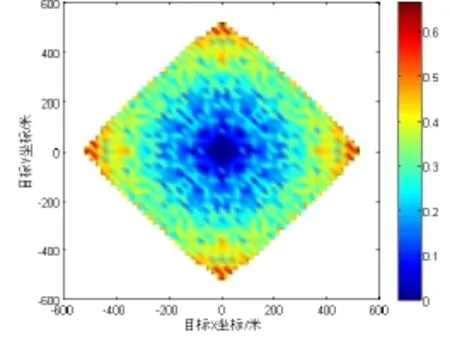
图11 接收点声速方法定位精度
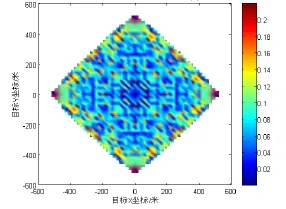
图12 等效剖面方法定位精度图
2.5目标运动带来的影响
上文都是以静止目标情况来讨论的,实际上,在定位的整个过程中,目标是以一定的速度运动的。由于目标的运动会导致信号接收点改变,计算时延信息就会给定位结果带来误差。下文将仿真分析目标运动对定位结果带来的具体影响。
仿真实验5:4只潜标正方形布放,布放深度4 km,目标深度4.1 km。假定声速c为常数,取1 525 m/s。目标在200 km×200 km的平面上以某一速度作匀速运动。速度方向分别为:东北向以10°为间隔,从0°至90°变化;速度为2 m/s、3 m/s、4 m/s、5 m/s和6 m/s。仿真结果见图13。

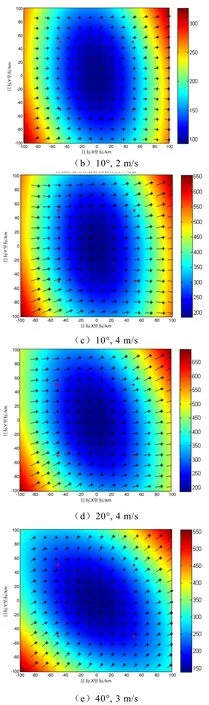

图13 运动目标对定位精度的影响
从图13中可得出仿真结论:(1)高精度区以4只潜标的中心点成椭圆分布,并且椭圆的长轴方向与目标运动方向垂直。中心点定位精度最高,以中心点向外辐射,距中心点越远,定位精度越低。(2)定位结果大体具有向目标运动方向靠近的趋势。(3)图13中可以看出目标运动速度越大,定位精度越低。以目标向正东方向运动为例,不同速度的定位精度见表1。
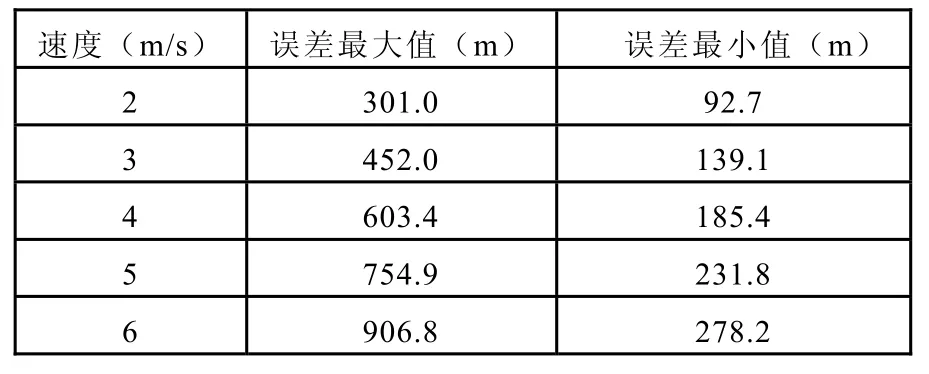
表1 目标不同移动速度下定位误差
3 结论
本文较系统的分析了水声定位系统中影响定位精度的几个因素,研究发现,当步放好的潜标存在位置偏差时,真实测距值与偏移测距值之差成双曲线,双曲线焦点为潜标真实位置和潜标偏移位置,目标在焦点的中垂线上时,测距误差最小;利用等效剖面法改善了声速变化对定位精度的影响;目标运动对定位的影响可以看出:定位结果具有向目标运动方向偏离的趋势;目标运动速度越大,定位精度越低。了解误差特性,在长基线水声定位中可以在硬件上减小误差的存在,后续工作将对误差进行定量的分析以及补偿研究,以达到更广泛的应用价值。
[1] 付进.长基线定位信号处理若干关键技术研究[D].哈尔滨工程大学,2007.
[2] 孙舟.分布式声源定位关键参数设计及定位算法实现[D].西安工业大学,2001.
[3] 丁翠环,郭燕子,韩硕.非同步长基线水声定位系统误差仿真分析[D].船舶电子工程,2013,(3):68-71.
[4] LEE FREITAG,MARK JOHNSON,MATTHEW GRUND. Integrated acoustic communication and navigation for multiple AUV localization[J]. OCEANS,Proceedings of MTS/IEEE. 2001,(4): 2065-2070.
猜你喜欢
高技术通讯(2022年12期)2022-03-23
声学技术(2020年6期)2021-01-08
优雅(2017年3期)2017-03-09
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
中学生数理化·八年级物理人教版(2016年7期)2016-12-24
沈阳工业大学学报(2016年2期)2016-09-15
系统工程与电子技术(2016年7期)2016-08-21
航空学报(2015年4期)2015-05-07
航空学报(2015年4期)2015-05-07