基于偏航系统的风电机组塔架扭转振动控制研究
2017-02-05 02:32朱达川邓英周峰田德
风能 2017年11期
文| 朱达川,邓英,周峰,田德
近年来,国内风电机组的发展方向以陆上低风速机组和海上风电为主,两者均具有较高的塔架高度。塔架是风电机组中的支撑设备,需要支撑机舱、风轮、轮毂的重量,但由于成本原因,很多机组采用柔性甚至超柔性的塔架,塔架的柔性程度增加使得其发生共振的可能性增大,更容易发生振动失稳。2016年发生了大唐风电机组倒塔事故,事故的直接原因是风电机组振动值严重超标,明显超过保护动作值。因此,研究塔架的振动控制具有重要意义。以往的研究更多着眼于塔架的前后振动以及侧向振动,而很少将塔架的扭转振动作为控制目标,由于风电机组塔架顶部与偏航系统直接连接,若不对塔架的扭转振动加以消除,塔架可能会因振幅过大或发生共振出现振动失稳,甚至出现倒塔事故。
本文以风电机组的偏航原理以及偏航系统结构为依据,建立了风电机组偏航过程中塔架的扭转振动模型。基于风电机组的偏航运动方程、塔架扭转振动方程,分析了风电机组偏航过程中的塔架扭转振动,设计出以偏航转矩为调控参数的闭环反馈控制器,并在Bladed软件中进行仿真验证。结果证明加入的闭环控制器以微弱的发电稳定性损失为代价有效地抑制了塔架的扭转振动。
数学模型
为了更好地分析风电机组的偏航运动与扭转振动,本文建立机舱和塔架运动的数学模型,并列出了偏航运动方程与塔架扭转振动方程。
一、偏航系统和塔架扭振模型
将机舱视为一个质量为m1、转动惯量为I1的圆盘,将塔架视为一个由刚度S和阻尼d作为支撑的质量为m2、转动惯量为I2的圆盘,如图1所示。在偏航过程中盘1与盘2之间存在摩擦力矩Mf,偏航力矩M,另外由于偏航过程中偏航误差的存在,有外部气动力矩Maero。由于风电机组的机舱转动惯量(含轮毂和风轮)远大于塔架转动惯量,因此可近似认为圆盘1(机舱)为施力物体,圆盘2(塔架)为受力对象。
二、偏航运动方程
偏航运动过程中,圆盘1的运动方程如下式所示:

式中,I1-圆盘1的转动惯量,kg·m2;α¯-偏航运动加速度,rad·s-2;M-偏航力矩,Nm;Mf-摩擦力矩,Nm;Maero-气动力矩,Nm。只有在偏航力矩M、摩擦力矩Mf、气动力矩Maero三者之和不为零时才有可能发生偏航运动。由式(1)可以看出偏航运动过程中起决定因素的力矩为偏航力矩和气动力矩,而偏航系统中直接可控的力矩只有偏航力矩。
三、塔架扭转振动方程
如上文所述,由于将机舱视为施力物体,因此塔架的扭转振动可以用如下方程表示:


图1 机舱和塔架运动模型
式中,I2-圆盘2的转动惯量,kg·m2;θ-塔架的扭转角度,rad;θ˙-塔架的扭转角速度,rad·s-1;θ¨-塔架扭转角加速度,rad·s-2;d-塔架的扭转阻尼,Nm·s·rad-1;S-塔架的扭转刚度,Nm·rad-1。由方程(2)可以得出塔架的扭转振动参数。
结合式(1)、式( 2)可知风电机组塔架与机舱之间的相对位移主要为机舱的偏航运动与塔架的扭转振动,另外还有少量的机舱扭转振动。因此在风电机组的偏航过程中可以通过改变偏航转矩的方式来达到控制目标。
振动控制
为了控制塔架的扭转振动,首先将此前建立的运动方程进行拉普拉斯变换,得到传递函数,然后分析传递函数,进行设计,最终得到所需的阻尼控制器。
一、传递函数推导
将偏航系统运动方程进行拉普拉斯变换可以得到偏航系统频域传递函数,由式(1)可得:

式中,s-拉普拉斯算子;g1(s)-机舱偏航速率相对于偏航力矩的传递函数;I1-圆盘1的转动惯量。
由式(2)可得:

式中,g2(s)-塔架扭转振动速率相对于偏航力矩的传递函数;S-塔架的扭转刚度,Nm·rad-1;I2-圆盘2的转动惯量;d-塔架的扭转阻尼。由结构力学可知塔架的固有扭转振动频率为

式中,ωt-塔架扭转振动固有频率 ;S-塔架的扭转刚度;I2-圆盘2的转动惯量。
机组的坎贝尔图如图2所示(重点显示塔架部分),图中可以看出塔架扭转模态的谐振频率约为4.42 Hz,由于扭转振动模态耦合了塔架模态和部分叶片高阶模态,所以其谐振频率相对塔架的前后方向与侧向较高。振动控制中应尽量削减这一频段的振动。当塔架的固有振动频率和外部振源频率确定后,塔架的振幅由阻尼决定,塔架的阻尼通常很小,如果在偏航动作中额外加入正比于塔架振动速率的转矩△M,则等效于增加了塔架振动阻尼。此传递函数的输入量是塔架的扭转振动速度,输出量是相应的偏航转矩增量。对于偏航系统来说,可以通过改变偏航力矩来达到这一效果,从而改善塔架的扭转振动。
二、控制器设计
在偏航动作中加入附加力矩△M后,可以得到:

式中,εp-等效塔架扭转振动阻尼系数; △M-附加偏航力矩,Nm;d-塔架的扭转阻尼,Nm·s·rad-1;S-塔架的扭转刚度,Nm·rad-1;I2-圆盘2的转动惯量。可以根据式(6)设计控制器的增益范围。

图2 塔架坎贝尔图

图3 偏航控制逻辑框图
偏航转矩控制的逻辑框图如图3所示,首先获取机组的振动参数反馈,由于测量塔架的振动加速度较为容易,因此控制器通过将塔架的振动加速度积分运算间接得到振动速度。因为偏航对风过程中,追踪风向、减小偏航误差是主要目的,所以需要消除高频信号对偏航对风的影响,因此在信号传递过程中需要使用低通滤波处理,即需要在传递函数中加入一个低通滤波器,二阶低通滤波器的标准传递函数为:

式中,G1-二阶低通滤波器的标准传递函数;ε-滤波器的阻尼系数;ω-滤波器的截止频率。取ε为2,ω为10 Hz。
由于塔影效应的存在,风轮每旋转一周,塔影效应出现3次,为了阻止这种不相干频率出现,需要在传递函数中附加陷波器,由于振动控制中6P、9P频段影响较小。因此采用一个3P陷波器,二阶陷波器的标准传递函数为:

式中,G2-二阶陷波器的标准传递函数。取ε为0.2,ω为3.996 Hz。
然后将滤波处理后的值输入振动控制器中,计算得出需求偏航转矩增量,将偏航转矩增量与上一次的偏航转矩相加得到最终的偏航转矩需求。
根据控制需求,分别对式(3)和式(4)中的传递函数设计闭环控制器,式(3)对应的是偏航对风控制器,式(4)对应的是扭转振动控制器。控制器的参数以闭环传递函数的Bode图所显示的幅频特性为依据。加入控制器前后的传递函数幅频特性如图4所示。从Bode图中可以看出,加入闭环控制器后的偏航对风与扭转振动传递函数的幅值尖峰明显削弱,相角有所增加,幅频特性得到改善。
考虑到风电机组偏航过程中需要追踪风向进行偏航对风,如果一味地追求振动控制效果可能会导致风电机组偏航误差角增大,发电功率下降,甚至使机组由于偏航扭缆而停机。所以采用的控制策略是加入一个迟滞环节,当偏航误差绝对值大于8°时切换至偏航对风模式,按照偏航对风的需求输出转矩;当偏航误差绝对值低于3°时切换至振动控制模式,按照振动控制需求输出偏航转矩。
仿真验证
为了验证控制器对风电机组塔架扭振的控制效果,将编写的偏航控制器程序以外部控制器的方法在Bladed软件中进行仿真实验。选取的研究对象为2 MW水平轴风力发电机组,额定风速为12 m·s-1,额定风轮转速为13.32 rpm,机组的具体参数如表1所示。
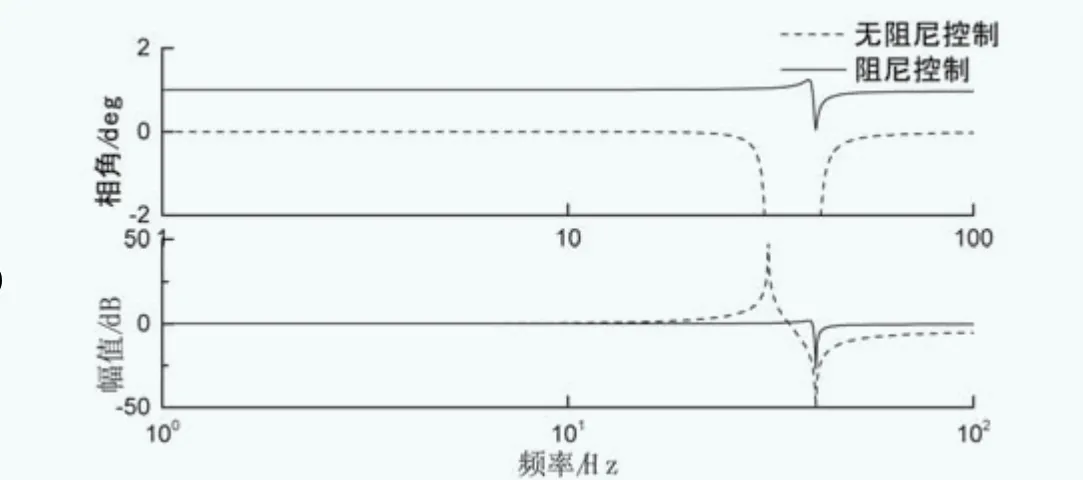
图4 (1) 偏航控制Bode图

图4 (2) 振动控制Bode图

表1 机组模型基本参数表
将设计的控制器作为外部控制器导入仿真软件,设置风速为15 m·s-1,风向从0°变化到10°,分别使用无阻尼控制和设计的阻尼控制器进行仿真实验。仿真结果见图5至图10。

图5 塔架扭转角度对比

图6 塔架扭矩对比

图7 频谱密度对比

图8 机舱扭转振动对比

图9 发电功率对比

图10 偏航误差对比
由图5和图6可以看出,在阻尼控制器的作用下,虽然在偏航对风期间(20s-45s)塔架的扭转振动和载荷略有增加,但在其他时刻塔架的扭转振动均得到了明显的抑制,并且振动衰减速度明显变快。在振动控制期间,塔架的扭转振动在无阻尼控制下振幅为-0.15°至0.12°,阻尼控制下振幅为-0.03°至0.03°,振动幅度削减了约80%,塔顶扭矩幅值从±1.5 MNm削减至±0.1 MNm;而偏航对风时塔架的扭转振动幅值和塔顶的扭矩只增加了0.05°和0.1 MNm。
由图7可以看出,频谱图中各个频率点塔架扭转振动均得到了抑制,并且4.42 Hz处(塔架扭转模态谐振频率点)的振动明显减少,降低了共振失稳的可能性。
由图8可以看出,施加阻尼控制以后,机舱的扭转振动幅值从-0.1°至0.3°削减至0.12°±0.03°,振动幅度减少了约70%,机舱的扭转振动得到了有效抑制。
由图9和图10可以看出,加入阻尼控制后机组的发电功率波动略有增加、发电稳定性有少许下降,机组的发电量波动从2000±5kW变为2000±10kW,偏航对风稳定性也稍有下降,但整体的偏航对风趋势并没有改变。说明阻尼控制器在不影响发电功率和偏航对风的情况下有效地抑制了塔架的扭转振动,削减了塔架扭转模态频率点处的振动,同时一定程度上抑制了机舱的扭转振动。
结论
本文以大型并网兆瓦级风电机组为研究对象,针对机组的塔架扭转振动问题进行研究,得出如下结论:
(1)通过建立风电机组偏航运动和塔架扭转振动的数学模型,验证了通过控制偏航转矩抑制塔架扭转振动的可行性;
(2)根据数学模型得出了机组偏航运动和塔架扭转振动传递函数,设计了塔架扭转振动阻尼控制器并分析其幅频特性,证明阻尼控制器有效地改善了传递函数的幅频特性;
(3)提出了采用迟滞环节的偏航控制策略。塔架的扭转振动仿真结果表明所选用的控制策略可以有效地降低塔架的扭转振动、机舱的扭转振动,削减塔架扭转振动固有频率处的振动,并且机组的发电功率稳定性仅受到了微弱的影响,偏航误差也维持在合理范围内。

摄影:陈裕法
猜你喜欢
上海航天(2022年5期)2022-12-05
机电信息(2022年19期)2022-10-15
水上消防(2022年2期)2022-07-22
科教导刊·电子版(2022年5期)2022-03-19
水上消防(2021年3期)2021-08-21
水上消防(2020年5期)2020-12-14
石油化工建设(2019年4期)2019-10-10
测控技术(2018年7期)2018-12-09
光学精密工程(2016年4期)2016-11-07
船舶标准化工程师(2015年5期)2015-12-03