双目视差测距望远光学系统设计
2017-03-30 08:11叶伟彦向阳吴爽白玉
长春理工大学学报(自然科学版) 2017年1期
叶伟彦,向阳,吴爽,白玉
(长春理工大学光电工程学院,长春 130022)
双目视差测距望远光学系统设计
叶伟彦,向阳,吴爽,白玉
(长春理工大学光电工程学院,长春 130022)
双目视差测距望远镜主要应用于对动态目标的测量,特别是飞机飞行距离的测量。双目视差测距望远系统,不对外发射信号,属于被动式测距仪,因此具有被动接收式和非接触式的特点,可测量500~5000m大范围距离。主要探讨了双目视差望远系统的主要光学原理,并利用Zemax光学设计软件对双目视差望远光学系统进行设计与优化,并对本光学系统进行了误差分析。使用CMOS自动调焦技术,提高了双目望远镜的成像质量。双目视差测距望远系统的测距理论误差在0.91%以下,满足测距理论误差小于1%的要求。
双目视差;光学设计;CMOS自调焦
本论文所研究的基于双目视差测距望远镜具有非主动式、不接触测距的特点,并且具有快速、自动测量功能[1]。基于双目视差的数字式测距望远光学系统采用摄远光学结构,即望远镜的筒长小于焦距。双目视差望远镜后接CMOS,采用数字图像处理技术,实时计算出所测距离。同时本论文讨论的光学系统采用COMS自动调焦技术,提高了成像质量。
1 工作原理
双目视差也称双目视觉,立体视觉。双目视差测距,是仿照人眼从两个稍微不同的角度观察物体的方式进行测量的[2,3]。人的两只眼睛在观察客观物体时,相对观察者不同的物距的像点在成像到左右两眼的视网膜上的不同的位置上,这种两眼视网膜上位置的差就称为双眼视差,它反映了客观景物的距离[4]。
双目视差测距望远光学系统利用了双目视差原理,其原理如图1所示。
两个摄像机投影中心的连接距离由b表示。当目标A通过由两个相同型号并且平行放置的摄像机组成的光电双目CMOS测距系统时,分别对应成像在CMOS相机上,并且左CMOS图像平面位置为x1,右CMOS图像平面位置为x2。光电双目测距系统示意图中两个相机具有相同的焦距,作为已知条件的f′,根据三角形的相似原理,可以得到式(1)和式(2):

由式(6)可知,在臂长b与系统焦距f′确定的情况下,飞机距离L与两光学系统成像位置差x成反比。在臂长b与系统焦距f′确定的情况下,得到两光学系统成像位置差x,即可求出被测距离L。

图1 双目视差原理图
2 初始结构的确定
2.1 光学系统参数确定
对式(5)微分并整理后得

由上式可知系统结构参数臂长b、焦距f′、与测量距离L、相对误差L/ΔL即精度之间的关系。
本次系统要求相对误差ΔL/L≤1%,且测量范围500m≤L≤5000m。由式(7)可知,臂长与相对误差成反比。为了使测量精度尽可能的高一些,取臂长b=2m。在保证成像质量的前提下,选取合适的相对孔径及焦距的大小。由式(7)可知,焦距与相对误差成反比。因此最终取焦距f′=600mm,相对孔径D/f′=1/6。
又由于本系统是实时跟踪系统,所以对摄像机的响应速度要求比较高,因此选用CMOS相机。且像元尺寸与相对误差成反比,故而选用像元尺寸较小的CMOS相机。在实际测量过程中,要求能够在5000m距离处,看到视场60m范围内的物体。因此可以知道视场角的大小:

摄远物镜是一种比较常用的用于大焦距物镜的光学结构,摄远物镜由前正透镜组和后负透镜组组成。它具有长度较短、体积较小、重量轻等特点。因此本次物镜选用摄远物镜结构。
最终确定双目望远物镜的相关参数:
测量范围500m≤L≤5000m,选用的CMOS像元尺寸为2.2微米,即∆x=2.2μm,取望远镜臂长b= 2m,焦距f′=600mm;视场角大小:2ω=0.69°;相对孔径:D/f′=6;摄远比:L/f′=0.75。
将已确定参数代入求得:相对误差∆L/L≤0.91%,满足相对误差小于1%的要求。
2.2 摄远物镜初始结构
在相关书籍中进行查找,最终确定某一款摄远物镜作为初始结构。初始二维输出图如图2所示。

图2 初始结构
3 光学系统设计结果与像差分析
3.1 优化结果
利用Zemax软件,采用自动和手动优化相结合的方式对初始光学结构进行优化。优化结果如下:

图3 输出图
通过观察射远物镜的二维输出图可知,优化后的摄远物镜的各个镜片的形状比较合理。

图4 MTF图
本次实验选用像元尺寸2.2×2.2(μm)CMOS相机,所以对于本次光学系统的调制传递函数(MTF),摄远物镜对应的极限分辨率应达到1000/ 4.4=227cycle/mm。
3.2 像质分析
由图4的MTF曲线图可知,三个视场的传递函数曲线都比较接近摄远镜头的衍射极限。且每个视场的子午和弧矢的传递函数曲线都比较接近,没有明显的分离状态。通过观察,我们还可以看到,所有视场的MTF曲线都比较平滑,说明成像质量比较好。
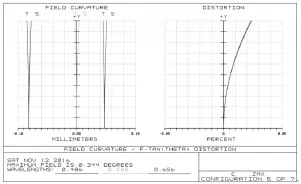
图5 场曲和畸变
由优化后的场曲曲线可知,三个波长的曲线虽然还有一些分离,但是已经基本符合本论文的要求。而且三个波长对应的子午和弧矢曲线经优化后不再分离,优化结果较好。在优化摄远物镜镜头过程中,畸变虽然是一个重点优化的像差,但是由于镜头的视场角比较小,所以也比较好优化。双目视差望远镜光学系统的精度受影响较大的像差为畸变。在光学设计中,通常用相对畸变q′来表示:


通过优化,光学系统的相对畸变小于0.03%,满足像质要求。
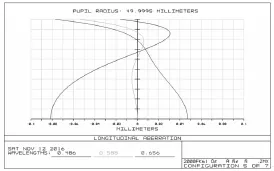
图6 球差
在摄远物镜结构中,由于焦距比较大,且二级光谱正比于f′,所以二级光谱色差很大,若校正不好,则会给系统带来很大的像差,所以无法达到较好的成像质量。所以二级光谱是优化的一个重点,也是一个难点。通过多次优化,在满足其他条件的基础上,加入多种操作数,最终将二级光谱降了下来。由上图可知,在0.707带,三个波长曲线相交,基本消除了二级光谱。

图7 点列图
本论文的摄远物镜的艾里斑尺寸为4.304μm,稍大于CMOS像元尺寸。而且通过观察上图,大部分光线都集中在艾里斑半径范围内。虽然各个波长之间光斑重合的不好,但是基本满足成像需求。
光学成像系统的弥散斑越大,数据匹配的误差越大,测量结果的误差也较大.对几组数据使用二次平方差法粗略计算后估计,弥散斑/有效图像〈2.5%时,弥散斑对结果影响很小,可以忽略。
通过以上分析可以看出,摄远物镜的前后透镜组各个镜片形状比较合理。传递调制函数MTF曲线经优化后三个视场的传递曲线都比较接近其衍射极限,像质比较好,基本达到要求。场曲和畸变也基本满足要求。其他像差也基本满足该镜头的要求。
3.3 CMOS自动调焦系统
基于图像处理的自动调焦技术是先通过图像探测器获得目标图像,然后将图像送到图像处理模块,图像处理模块根据图像清晰度评价算法对图像进行实时处理并将图像清晰度评价值送到调焦控制模块,最后调焦控制模块根据图像清晰度评价值判断系统调焦是否准确,目标成像是否清晰,如果评价结果不满足要求,调焦控制模块则控制执行机构做出相应的调整,系统不断重复以上过程直至图像探测器获得清晰图像,即完成自动调焦。

图8 不同物距对应的MTF曲线
由于本论文的摄远镜头要求在500m~5000m大范围内成像清晰。因此本论文选用CMOS自动调焦系统。
因此,在光学设计过程中,使用多重结构,对500m~5000m范围内物距进行设计。分别设定物距为500m,1000m,3000m,5000m。
经过对比可知,对应500m~5000m物距范围内,虽然物距改变,但是在经过CMOS相机的自调焦过程后,其成像质量依然保持较好。各个MTF曲线没有明显的差异。
由于物距改变,根据高斯公式,物距也同时发生改变。经过Zemax软件模拟,不同物距对应不同后截距数据如下表:

表1 物距与后截距对应数据表
由上表可知,CMOS相机自动调焦过程中,移动范围较小,电控系统可以较快的反应物距变化,满足系统实时跟踪的需求。
4 结论
双目视差望远系统设计采用摄远系统减小系统长度,利用CMOS自动调焦系统,提高了成像质量,使测量精度更加准确。利用Zemax光学软件,对该系统的各种像差进行优化,使得该系统像差都在允许范围内。
[1]孟宗,刘彬.激光多普勒扭矩非接触测量的研究[J].光电工程,2006,33(6):88-91.
[2]王湘君,周春艳.立体视觉概述[J].电脑知识与技术,2005,30(36):145-147.
[3]赵勋杰,李成金.双目立体实时测距系统的关键技术研究[J].激光与红外,2006,36(9):874-877.
[4]万燕,周增刚,李晓园.基于双目视觉的车辆检测和车速测定[J].计算机应用与软件,2013(08):275-278.
[5]郁道银,谈恒英.工程光学[M].北京:机械工业出版社,2002:145-148.
[6]王之江,顾培森.实用光学技术手册[M].北京:机械工业出版社,2007:865-867.
[7]林家明,杨隆荣.CCD及摄像机技术在工业中的应用[J].物理,2000,29(12):732-735.
Optical Design of Binocular Parallax Ranging Telescope
YE Weiyan,XIANG Yang,WU Shuang,BAI Yu
(School of Optoelectronic Engineering,Changchun University of Science and Engineering,Changchun 130022)
Binocular parallax ranging telescope is mainly used in the measurement of dynamic objects,especially the measurement of aircraft flying distance.Binocular stereo ranging telescope system needn’t send signal,which is only a kind of passive range finder,so it has characteristics of passive receiving type and non-contact type,and measurement 500~5000m in wide range.The main optical principle of binocular parallax of telescope has been discussed in this paper.And the binocular parallax of telescope optical system was designed and optimized by using ZEMAX optical design software,and analyze the error of the optical system.Using CMOS auto focusing technology,the imaging quality of binocular telescope is improved.The measurement error of binocular parallax ranging telescope was less than 0.91%,which satisfies the requirements of the range error less than 1%.
binocular parallax;optical design;CMOS auto focusing
O434
A
1672-9870(2017)01-0072-04
2016-07-13
叶伟彦(1990-),女,硕士研究生,E-mail:515891325@qq.com
向阳(1968-),男,教授,E-mail:xyciom@163.com
猜你喜欢
科学大众(2022年17期)2022-09-22
中学生数理化·八年级物理人教版(2022年11期)2022-02-14
东坡赤壁诗词(2021年2期)2021-06-01
锦绣·上旬刊(2020年3期)2020-06-08
学生天地(2019年29期)2019-08-25
理科考试研究·初中(2018年10期)2018-12-11
大观(书画家)(2018年6期)2018-07-08
艺海(2018年3期)2018-05-17
光学精密工程(2016年4期)2016-11-07
系统工程与电子技术(2016年7期)2016-08-21