同极永磁偏置径向磁悬浮轴承特性分析
2018-08-04 05:58吴华春余海涛胡帅陈璞
轴承 2018年7期
吴华春,余海涛,胡帅,陈璞
(1.武汉理工大学 机电工程学院,武汉 430070;2.中车株洲电力机车有限公司,湖南 株洲 412001)
人工心脏泵(简称血泵)作为人体心脏的代替品,可暂时或永久地代替心脏功能,为终末期心脏病患者提供治疗。近些年国内外学者提出一种轴流式磁悬浮血泵,以磁悬浮轴承代替机械轴承,解决了因机械轴承磨损、发热引起的溶血和血栓等问题,提高了血泵使用的耐久性;磁悬浮血泵具有高洁净、无磨损等其他传统血泵无法比拟的特点[1]。
磁悬浮轴承分为主动电磁轴承(Active Magnetic Bearing,AMB)、被动永磁轴承(Permanent Magnetic Bearing,PMB)和永磁偏置磁悬浮轴承(Permanent Magnet Biased Magnetic Bearing,PBMB)。AMB利用可控电磁力实现转子稳定悬浮,但其功耗高,体积大;PMB无需控制,体积小、无功耗,但其刚度低且不可控;PBMB将AMB与PMB结合起来,具有AMB动态性能良好和PMB体积小、无功耗等特点[2]。因此,在磁悬浮血泵中采用PBMB支承,仅需极小的控制电流抵消转子重力,即使转子有微小扰动,其控制电流也仅仅是在瞬间变化,完成对转子位置的调整;其功耗低,能自动调整转子位置,动态性能优良。
目前国内外已经设计出多种由磁悬浮轴承组成的轴流式磁悬浮血泵支承装置。文献[3]设计的磁悬浮血泵支承装置由2个径向PMB实现径向悬浮;文献[4]设计的支承装置由2个径向AMB控制径向悬浮,轴向PMB限制轴向位移;文献[5]提出一款轴流式磁悬浮血泵用PBMB的参数设计方法以及控制策略,然后进行了仿真分析和试验验证;文献[6]设计优化了一种PBMB,并将其应用于血泵支承系统,最高转速提高了50%,大大提高了支承性能。以上研究验证了采用磁悬浮轴承支承血泵转子的可行性,一定程度上解决了磁悬浮血泵支承问题。
目前对于PBMB功耗的研究较多,文献[7]综述了同极性与异极性PBMB的优缺点,指出同极性PBMB涡流和磁滞损耗相对较低;文献[8]采用同极性PBMB降低转子磁场变化频率,进而降低转子铁芯旋转损耗;文献[9]对磁悬浮轴承损耗影响进行试验分析,发现同时采用径向同极型结构和轴向零偏置电流控制方式能有效减少磁悬浮轴承的支承损耗。由上述文献可知,采用同极性PBMB可降低磁悬浮支承系统功耗以及磁滞损耗引起的发热。
因此,将同极永磁偏置径向磁悬浮轴承(HPRMB)应用于轴流式磁悬浮血泵,旨在降低磁悬浮血泵支承系统功耗和体积,使其更有利于植入体内。
1 HPRMB结构及工作原理
HPRMB结构如图1所示。永磁环沿轴向充磁,一端为N极,另一端为S极,永磁环产生的偏置磁通如图1a中虚线所示。该磁轴承定子有8个磁极,x,y方向上的4个磁极线圈相互串联,产生的控制磁通如图1a所示(仅画出x轴上的磁通,y方向上与x方向相同)。

图1 HPRMB结构及工作原理图Fig.1 Structure and working principle diagram of HPRMB
此HPRMB采用差动磁场方式,如图1b所示,当转子受到一个干扰力(假设为x-方向)时,转子会沿x-方向偏离平衡位置,则x-方向气隙减小、磁通密度增大,x+方向气隙增大、磁通密度减小,由于两者磁通密度存在差值,使转子向x-方向运动,此时x方向位移传感器检测出转子偏移量,经过信号处理器→A/D模块→控制器→D/A模块→功率放大器→控制电流i→电磁线圈等处理,在x方向气隙处产生控制磁场,与偏置磁场在x+方向叠加,而在x-方向抵消,从而产生一个沿x+方向的悬浮力作用在转子上,使转子回到平衡位置。同理,当转子受到y方向的干扰力时,工作原理与此相同。
2 HPRMB承载模型
为了简化磁路计算,可以不考虑铁芯磁阻、磁路饱和以及漏磁。HPRMB的等效磁路模型如图2所示。图2中,Rxi,Ryi(i=1,2)分别为x,y方向的上下气隙磁阻;Rp为永磁环磁阻;Fp为永磁环磁势;Rs为定子铁芯磁阻;Rr为转子铁芯磁阻;Nix,Niy为电磁线圈产生的磁势。在不考虑软磁材料磁阻的情况下,可以近似认为Rs=Rr=0。

图2 HPRMB等效磁路模型Fig.2 Equivalentmagnetic circuitmodel of HPRMB
2.1 偏置磁路分析与计算
根据图2可得永磁环产生的偏置磁通等效磁路,如图3所示。

图3 偏置磁通等效磁路图Fig.3 Equivalentmagnetic circuit of permanent biased flux
以y方向为例(x方向类似),设g0为转子处于平衡位置时气隙长度,Rg为转子处于平衡位置时各气隙磁阻,y为转子在y方向的偏移量,y方向各气隙处的磁阻为

2.2 控制磁路分析与计算
根据图2可得电磁线圈通电后产生的控制磁通等效磁路,如图4所示。

图4 控制磁通等效磁路图Fig.4 Equivalentmagnetic circuit of control flux
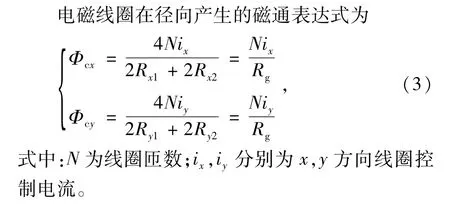
由(3)式可知,线圈在径向x,y方向气隙处产生的控制磁通Φc与转子位置无关,只取决于线圈匝数N与控制电流i的大小。
2.3 径向悬浮力方程
由于在y方向各气隙处的磁通是由偏置磁通和控制磁通合成,因此各气隙处磁通表达式为

式中:Ky为位移刚度,为(8)式的第1项系数;Ki为电流刚度,为(8)式的第2项系数。
3 HPRMB结构参数设计
3.1 气隙大小及磁通密度
相同结构定转子气隙越小,气隙磁通密度越大,漏磁越低,计算精度越好[10]。对于轴流式磁悬浮血泵而言,为防止间隙过小而造成血液破坏引起溶血,保证有足够的间隙供血液流动,因此取定转子单边气隙g0为1.5 mm。另外从PBMB设计经验来看,当转子处于平衡位置时,气隙偏置磁通密度Bp0和最大控制磁通密度Bcmax等于软磁材料饱和磁通密度Bs的二分之一时最为理想,所能提供的悬浮力最大。但是在该轴承中,由于特殊要求,气隙长度是普通磁悬浮轴承的5倍左右,气隙磁阻远大于普通磁悬浮轴承,为使Bp0和Bc等于Bs的二分之一,必须增大永磁环充磁长度或减小磁极面积,但这样会大幅度增大轴承轴向长度或降低悬浮稳定性。因此,在满足最大悬浮力条件下,取偏置磁通密度等于饱和磁通密度的五分之一,即5Bp0=5Bc=Bs。
3.2 磁极面积A及线圈绕组
确定最大悬浮Fmax以及气隙处最大磁通密度Bmax=Bp0+Bc之后,由(7)式可得磁极面积

式中:J为电流密度,允许的电流密度越大,同样承载能力下,线径越小,轴承尺寸就越小。
3.3 永磁环结构参数
永磁环对外提供的磁动势Fp与材料和结构有关。对于选定的永磁环材料和结构,Rp,Fp是一个常数

式中:Ap为永磁体充磁截面积;μp永磁体磁导率;Hc为永磁体矫顽力;Lp为永磁体充磁方向长度。
3.4 HPRMB 参数设计结果
按照工作要求,为保证有足够的间隙供血液流通,令其叶轮转子最大径向偏移量等于0.4 mm,转子质量为0.098 kg,转子因受扰动偏移时永磁体产生的最大永磁负拉力等于1 N,取安全系数等于2。由以上设计过程可得HPRMB结构尺寸的设计结果,见表1。

表1 HPRMB结构参数Tab.1 Structure parameters of HPRMB
4 仿真与试验
根据表1中结构参数,设计HPRMB如图5所示,采用有限元分析软件ANSYSWorkbench11.0的Magnetostatic模块对同极永磁偏置径向磁悬浮轴承气隙磁场进行数值模拟仿真与分析,同时为测量气隙磁场分布和刚度特性参数,搭建了HPRMB试验平台,如图6所示。

图5 HPRMB样机Fig.5 Prototype of HPRMB

图6 HPRMB试验平台Fig.6 Test rig of HPRMB
4.1 偏置磁场与混合磁场
选用霍尔高斯计对偏置磁场和混合磁场进行测量(图7),获得轴承工作气隙处的磁场分布,以验证HPRMB磁路设计的正确性。

图7 磁场测量试验Fig.7 Measurement test ofmagnetic field
将仿真结果与测量结果拟合成曲线,如图8所示,An(n=1,2,3,4)表示各个磁极,测量结果与仿真结果的变化趋势相同,大小基本相等,验证了磁路设计与计算结果的正确性。
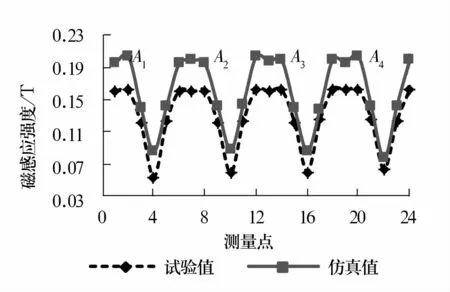
图8 偏置磁场磁通密度分布图Fig.8 Distribution diagram of magnetic flux density of bias magnetic field
测量值比仿真值平均小0.04 T,可能存在原因有:1)高斯计探头太薄、太软,导致测量位置存在一定偏差;2)实际中的漏磁比仿真计算中要严重;3)永磁体充磁不均匀等。
HPRMB绝大多数是在偏置磁场和控制磁场叠加的混合磁场下工作,因此需对混合磁场分布进行测量。通过给y方向上的电磁线圈通0~3 A的电流,x方向上不通电流,测量此时y方向上混合磁场分布情况,如图9所示。
由图9可知,测量结果与仿真结果的变化趋势相同,两者之间存在偏差,测量值比仿真值平均小0.04 T,导致的原因与偏置磁场测量分析是一致的。另外,当y方向线圈电流从0~3 A变化时,y+方向的控制磁通与偏置磁通相叠加,y-方向的控制磁通与偏置磁通相抵消;x方向线圈无电流,其气隙处的磁通密度分布与偏置磁场磁通密度分布一致,说明y方向的控制磁场对x方向的磁场分布没有干扰,即2个径向间磁场分布没有耦合。

图9 混合磁场磁通密度分布图Fig.9 Distribution diagram ofmagnetic flux density of hybrid magnetic field
4.2 电流刚度及位移刚度
电流刚度Ki和位移刚度Ky是在一系列假定的条件下,由非线性悬浮力方程((7)式)经过线性化得到的。为了准确获得支承特性参数Ky和Ki,必须通过试验的方法来测定。
由图10可知,仿真计算和试验测量获得的Ki分别为1.33,1.23 N/A,误差为7.5%;Ky分别为3.1,2.7 N/mm,误差为9.6%。测量结果偏小的可能原因为:测量存在误差或者实际中的漏磁比仿真计算中要严重。另外,血泵转子由于结构要求,其径向位移区间很小,当转子位于此区间时,测量与仿真结果表现较好的线性,为线性控制器的设计提供了基础。

图10 电流刚度及位移刚度曲线Fig.10 Curves of current stiffness and position stiffness
4.3 对比分析
以轴向长度、径向外径、电流刚度、位移刚度和气隙长度作为对比参数,设计的轴承(结构1)作为基准,与其他磁悬浮血泵用永磁偏置磁悬浮轴承(结构2[5]、结构3[6])相比较,结果如图11所示。

图11 3种结构对比Fig.11 Comparison of three structures
这3种结构中,径向外径大致相等,因此轴向长度决定了轴承体积。三者比较而言,虽然结构2体积最小,但其位移刚度大约仅为结构1的一半,并且气隙大约仅为结构一的三分之一,易损伤血液;结构3位移刚度约为结构1的1.6倍,但其体积约为1.4倍,且电流刚度过小,不便主动控制,另外其气隙过大,漏磁相对严重。因此,结构1无论是体积、刚度,还有气隙大小,均最为适中,性能相对较好。
5 结束语
为了降低轴流式磁悬浮血泵支承系统体积和能耗,将HPRMB应用于轴流式磁悬浮血泵支承系统。分析HPRMB结构和工作原理,采用等效磁路法探讨了磁路设计,推导出该轴承的承载模型。
利用有限元法获得了HPRMB的磁场分布、耦合特性,搭建了轴流式磁悬浮血泵支承装置,完成了磁场分布、刚度参数测量试验,与仿真计算对比,结果表明:两者分布规律完全一致;偏置磁场与控制磁场以及径向方向之间没有耦合;位移刚度和电流刚度基本一致,大小虽然存在一定的误差,但这是由于支承结构要求大气隙而存在严重漏磁所导致的。
文中研究的HPRMB与其他磁悬浮轴承相比,性能适中,降低了轴流式磁悬浮血泵的体积和功耗,同时为磁悬浮血泵支承系统的设计提供了经验。
猜你喜欢
护士进修杂志(2022年24期)2023-01-11
大电机技术(2022年5期)2022-11-17
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
小猕猴智力画刊(2022年4期)2022-05-23
小学科学(学生版)(2021年4期)2021-07-23
中国生物医学工程学报(2019年5期)2019-07-16
弹箭与制导学报(2018年1期)2018-11-13
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
中学生数理化·七年级数学人教版(2017年6期)2017-11-09