
等厚干涉实验中牛顿环暗纹直径自动测量方法
2018-09-04 12:48谌建飞文勇军唐立军
实验技术与管理 2018年8期
邓 敏, 赵 丹, 谌建飞, 周 旋, 文勇军, 唐立军
(1. 长沙理工大学 物理与电子科学学院, 湖南 长沙 410114; 2. 近地空间电磁环境监测与建模湖南省普通高校重点实验室, 湖南 长沙 410114)
等厚干涉实验是大学物理实验的基本实验项目。实验的关键在于准确测量干涉图像暗纹的直径。传统的牛顿环实验采用目测读数,为提高精度需测量十几到几十环暗纹直径,计算量大;显微镜视场范围小,由于视觉疲劳引起的计数错误会导致误差增大[1]。为解决人工计算问题,已经有多种检测方法,比如基于对称相关、伪彩色增强等各种图像算法研究[2-4],还有采用线阵CCD与计算机软件结合的自动测量方法[5-7],但一般局限于替代人工测量,有的仅用于教师给学生演示,对学生实验能力培养作用不大。本文利用本实验室的远程实验平台[8-10],以等厚干涉实验为研究对象,探索一种有利于学生自我训练的牛顿环暗纹直径测量方法,实现远程实验操作。
1 系统原理与设计

本设计的测量系统主要由视频采集部分、图像处理部分以及远程实现下的电机控制部分组成。系统结构框图见图1。视频采集部分用摄像头从读数显微镜目镜采集牛顿环图像;通过远程操作电机控制部分转动读数显微镜微调手轮,得到不同状态下的牛顿环图像和相应移动距离;图像处理部分则通过微处理器对得到的牛顿环图像进行处理得到牛顿环各级暗纹直径,再通过逐差法计算得到透镜的曲率半径值,并可将暗纹直径和曲率半径值发送至网页端。

图1 系统结构框图
2 系统实现
摄像头采集牛顿环图像后,经灰度变换、图像降噪、图像二值化等预处理操作后,根据牛顿环图像明暗相间的特点,利用投影特征识别算法读取暗纹直径,根据定标得到的比例系数得到暗纹直径的尺寸,完成透镜曲率半径的计算。
2.1 牛顿环图像采集程序设计
图像采集部分采用mjpg-streamer流媒体服务器进行目镜下的视频信息采集,每隔一段时间发送一帧图像到图像处理线程进行参数测量。Mjpg-streamer是一款轻量级的视频流服务器软件,输入组件input_uvc.so直接调用USB摄像头驱动程序,从摄像头读取视频数据,同时将视频图片压缩为JPEG格式,然后将视频数据复制到内存中。输出组件output_http.so是一个完全符合http标准的web服务器,将输入组件中已经压缩为JPEG格式的图片根据现有M-JPEG标准以http视频数据流的形式输出[9];输出组件output_file.so用来抓取图像,可将输入组件的JPEG图像存储到特定的图像文件。本方法将采集的图像以视频流的形式输出至网页端同时每隔2 s将图片保存至树莓派图像处理程序目录下。
2.2 牛顿环图像处理设计
等厚干涉实验采用钠光灯作为光源,获取的牛顿环图像里含有较多噪声,对比度不高,对暗纹直径测量造成较大干扰,因此在暗纹特征提取前需要对图像进行预处理。为减少后续的图像计算量,缩短系统的处理时间,首先将采集的牛顿环图像转变成8位的灰度图像。
对于牛顿环图像而言,图像边缘细节特征尤为重要,会影响到后续对暗纹特征提取时的有效性和可靠性。因此对牛顿环图像的噪声进行抑制时应尽量保留细节特征。本文选用的双边滤波是一种非线性的滤波方法,是结合图像的空间邻近度和像素值相似度的一种折中处理,同时考虑空域信息和灰度相似性,因此可以在滤除牛顿环图像噪声的同时保持图像的大体分块进而保留图像中暗纹的边缘信息。
为了将感兴趣区域(暗纹)和背景分离,需要将图像转换为二值图像。对于光照不均匀的牛顿环图像,为产生较好的二值化图像应选用自适应阈值算法。根据像素的邻域块的像素值分布来确定该像素位置上的二值化阈值,从而把牛顿环图像中的暗环分割出来。预处理过程如图2所示。

图2 预处理过程图
2.3 牛顿环暗纹直径识别和测量算法设计
2.3.1 定标
由于数字图像是以像素为基本单位,在进行暗纹直径测量前应对整个系统进行长度标定。本文利用测微目镜拍出的标准刻度——游标卡尺的刻度来定标。在测试中,同等高度时在视野范围内拍出游标卡尺的刻度为5 mm。每个像素代表的物理尺寸N=视野长度/目标区域直径像素,本系统N=5/545。使用带刻度的目镜标尺来验证此定标结果。测得游标卡尺上1 mm为50格,目测第一级暗纹直径约为85格,测得第一级暗纹直径的像素个数为188,所以比例系数N=1.7/188。相对误差为0.000 13。可以认为比例系数是正确的,即定标成功。
2.3.2 基于投影特征识别的暗纹直径测量算法设计
对得到的牛顿环二值化图像沿垂直方向投影来测量牛顿环的暗纹直径。对于二值化图像f(x,y),对其列进行叠加累计求和得到一维向量S,一维向量中的每个数代表第几列的灰度累计值。在暗纹中心处会累积最多的像素出现峰值[12]。对称的峰值个数为暗纹个数,且对称峰值间的距离为暗纹直径。投影曲线的波峰存在于曲线的极值点处,即图像变化为零的点。文中图像投影曲线是离散的,因此通过求差分函数来求投影曲线的峰值。 利用差分法确定暗纹位置为图3中所示。

图3 确定暗纹位置
对于牛顿环中心位于视野中心的图片来说,由于视野中的牛顿环图像不一定是左右完全对称的,即左右边的暗纹级数不一定相同,因此需要先判断视野中有几个完整的暗纹。可以很明显地看出第一级暗纹和图像中心叉丝间的距离比各级暗纹间距离都大,可根据此特点来判断完整暗纹个数。然后再将对应的成对峰值处像素相减得到暗纹直径。最后根据定标比例系数换算为物理尺寸,再按照逐差法求得牛顿环的曲率半径。整个直径读取流程如图4所示:
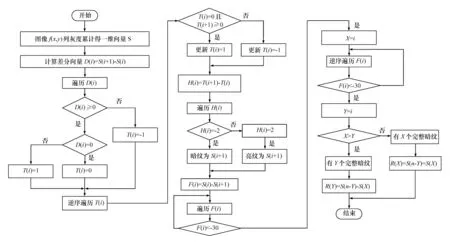
图4 牛顿环暗纹直径读取流程
3 远程实验测量
由于实验中测量的干涉条纹越多,测量的精度越高,因此在等厚干涉实验远程实现中,为提高实验精度,同时更大程度还原传统实验步骤,增强实验操作体验,采用牛顿环中心位于视野左、右端时的两张图像及其对应的移动距离进行处理。测量中投影后峰值图像如图5所示,第一、二级暗纹在图中标出。由于左右移动时光照亮度不均匀,后段暗纹未能确定其准确的峰值位置。

图5 左、右端图像垂直投影图
远程实验时具体操作如下:
(1) 调节牛顿环中心在视野中心,取图进行处理得到暗纹直径,按逐差法计算得到牛顿环曲率半径(此步骤可用于与下述测量结果进行比较);
(2) 转动测微鼓轮使目镜筒往左边移动至第一级亮纹处于边缘位置,记录此时目镜相比第一步时的移动距离(此距离可通过光电编码器反馈得到[10]);
(3) 取此时的牛顿环图像进行处理、得到左边后25个峰值位置(暗纹个数可调整),根据定标比例系数换算为物理尺寸,峰值位置减去镜筒移动距离则为暗纹的左位置;
(4) 转动测微鼓轮使目镜筒往右边移动至第一级亮纹处于边缘位置,记录此时目镜相比第一步时移动距离;
(5) 取此时的牛顿换图像进行处理得到右边前25个峰值位置,根据定标比例系数换算为物理尺寸,峰值位置加上镜筒移动距离则为暗纹直径的右位置;
(6) 暗纹左、右位置相减得到各级暗纹的直径,按逐差法计算牛顿环曲率半径。
4 系统测试
以测量曲率半径为855 mm的透镜为例,验证本方法测量暗纹直径的准确性。传统测量方法、单图测量方法以及多图测量方法下第一次测试得到的牛顿环暗纹直径数据记录如表1所示,3种方法进行多次测量得到牛顿环曲率半径结果如表2所示。本研究采用的光源为黄钠光灯,波长λ为589.3nm。
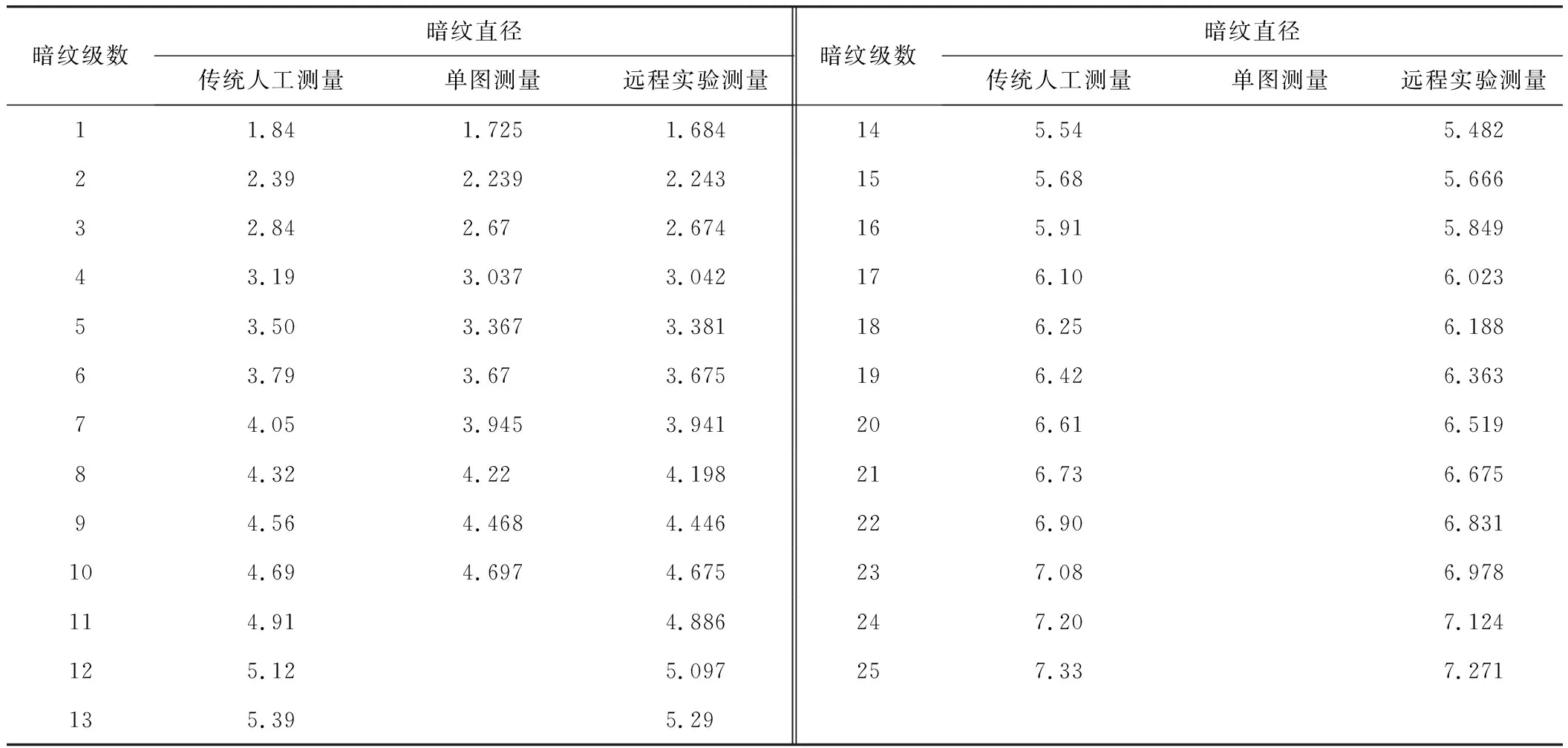
表1 3种方法测得暗纹直径(第一次测试) mm
如表1和表2所示,当采用传统人工测量方式时,取m-n=10,人工测量方式受不同实验者的主观因素影响较大,因此误差波动较大。对单张牛顿环中心位于视野中心的图片测量时,取m-n=5,由于视野范围内暗纹级数少,读数显微镜的测量叉丝和干涉条纹对准时产生的定位误差大,所以测量误差较大。远程实验测量方式下,取m-n=10,由于减少了主观因素和部分客观因素影响,测量误差波动较小且精度提高。
在本方法测量过程中误差来源主要为摄像头采集图像时产生的畸变、牛顿环仪调节不当产生的暗纹形变以及钠光灯光场亮度,需通过后续校准来实现更高精度的测量。
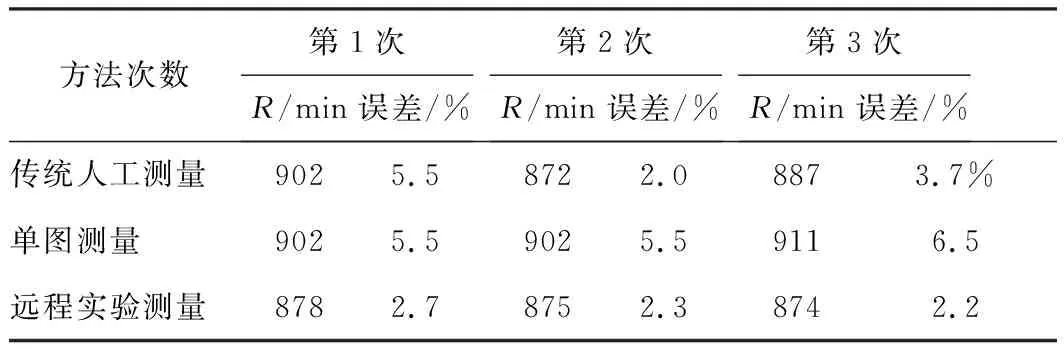
表2 3种方法3次测量的牛顿环曲率半径结果
5 结论
将图像处理技术用于等厚干涉实验中的牛顿环曲率半径自动测量中,根据牛顿环图像明暗相间特点,采用投影特征识别方法,实现了一种可用于远程实验中的牛顿环暗纹直径自动测量方法。测量结果表明,该方法优于传统的人工判读测量,是一种有效的牛顿环测量方法,应用于远程等厚干涉实验,实验体验效果好,测量精度较高,误差在2.2%~2.7%,测量速度快,提高了实验效率,有利于远程实验开放。
猜你喜欢
渔业致富指南(2022年9期)2022-11-05
今日农业(2021年19期)2022-01-12
食品与发酵工业(2021年4期)2021-03-01
空间科学学报(2020年1期)2021-01-14
睿士(2020年12期)2020-01-03
小学生学习指导(中年级)(2019年10期)2019-10-08
小学生学习指导(中年级)(2017年4期)2017-03-20
成都信息工程大学学报(2017年6期)2017-03-16
作文与考试·小学高年级版(2016年7期)2016-05-14
中国光学(2015年5期)2015-12-09
