基于粒子群算法齿轮箱减速飞艇动力系统多目标优化
2018-09-10 10:28周一民
陕西理工大学学报(自然科学版) 2018年4期
马 丽, 周一民
(九州职业技术学院 中锐汽车学院, 江苏 徐州 221116)
平流层飞艇的运行环境特性与飞行特点,决定了其停空时间可达几个月至几年;因其升空高度高、在大范围内定点能力强、可持续定点、承载有效载荷的能力比较强、可反复使用等特点,已被公认为是在临近空间使用的最佳飞行器[1-2]。所以,平流层飞艇作为在平流层空间定点飞行的通讯平台和用作军事用途的近空间信息平台具有重要的研究意义。
由于大气环境存在很多不确定因素,飞艇在飞行过程中会存在巨大的差异。平流层的大气呈现“上面气层热下面气层冷”的状态,虽然平流层大气很稳定,大气的垂直运动很弱,水气含量也少,透明度很高,但四季的变化对平流层大气环流是有一定影响的。在飞艇设计中应充分考虑到大气的密度、大气流动的速度、气流的方向、大气黏滞系数等大气特征的变化范围、四季交替情况、昼夜变化情况以及停空时间长短的变化规律。只有充分了解大气环境变化依据、积攒大量经验数据,方可正确地开展飞艇机构机件、能量系统等前期设计工作,从而保证推进系统等后续工作的顺利开展。
近年来,国内外学者针对平流层飞艇的优化问题进行了广泛研究。郭雪岩等[3]、WANG Quan-bao等[4]以飞艇体积为约束条件对飞艇外形进行优化,使飞艇阻力明显降低。Alam I等[5]、Kanidale T等[6]采用模拟退火算法,以艇长为优化变量,构建阻力系数最小、应力最小、质量最轻3个目标函数进行多目标优化。安伟刚等[7]对模型飞艇外型以阻力最小和重量最轻为目标,应用多目标粒子群优化算法对飞艇进行多目标优化,并采用基于信噪比的决策方法,最终获取了一种稳健的设计方案。平流层大气密度特别稀薄,以空气动力为动力的飞行器一般很难上升到平流层高度。因此,电动推进系统低功耗运行控制技术的研究显得十分重要,而飞艇动力系统的优化是飞艇可靠运行的保证,也是目前飞艇推进控制研究的一个难题。基于此,本文采用基于改进的粒子群算法对飞艇动力系统中电机的转矩、螺旋桨转速、飞艇速度等进行多目标优化,实现飞艇定点保持,达到飞艇载荷高、推力大、平稳性强的技术要求。
1 平流层飞艇动力系统
飞艇的动力系统由能源装置、动力装置(电动机)和推进装置(螺旋桨、风扇)组成。平流层的大气环境对飞行器状态会产生很大影响。平流层风速大小的随机变动,使得飞艇的动力控制系统必须不断调节电机的转速、转矩来改变推力大小,抵抗风速变化的影响,实现定点保持。本文研究的飞艇的主动力由无刷直流电机驱动,当推进系统采用高速型配齿轮箱减速后驱动螺旋桨时,为了取得螺旋桨的最佳效率,即飞艇推进系统推力矢量控制,需要从飞艇电机螺旋桨角度进行多目标优化。飞艇动力系统参量包括[8-10]:
(1)直流无刷电机电磁转矩T(单位:N·m):
(1)
其中Em为感应电势最大值,Em=2πfWAΦ。
(2)螺旋桨转速n(单位:r/min):
(2)
理想空载转速:
(3)
其中,ua(单位:V)为高能锂电池提供的电机电枢电压,Ra(单位:Ω)为电枢绕组平均电阻,ΔuT(单位:V)为功率晶体管饱和管压降,WA为电枢绕组每相有效匝数,Φ(单位:Wb)为每极气隙磁通,p为电机极对数,Ia(单位:A)为电枢电流。上述参数取值如表1所示。
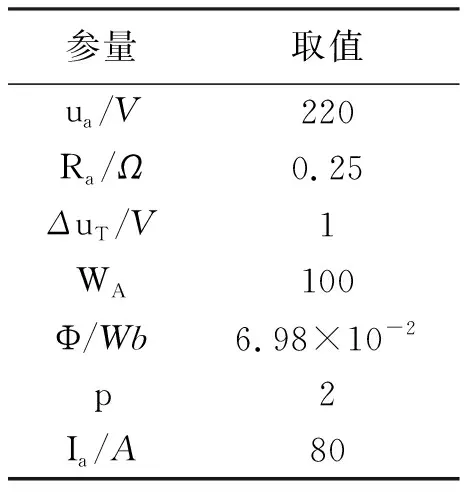
表1 电机转速参量
(3)飞艇飞行速度v(单位:km/h)、飞艇速度比δ(巡航功率时的降频转速与螺旋桨的最佳转速之比)和螺旋桨推力Ft(单位:N)[11]:
Ft=k1n2+k2nv=Ft(ua,v),
(4)
其中k1=3.597 9×10-7,k2=-6.721 6×10-5。
(4)电机功率W(单位:W):
W=ΩT,
(5)
式中,螺旋桨角速度Ω=2πn/60,T=n2/9.007 52。
当飞艇飞行速度v因风的扰动不断变化时,被控对象参数有摄动,即电机转矩T、螺旋桨推力Ft和螺旋桨转速n是区间系数,T变化范围为[T1,T2],Ft变化范围为[0,Fmax],转速n变化范围为[n1,n2]。飞艇速度v的变化范围为[0,10],即v的最大值为vC=10 km/h,飞艇速度比δ变化范围为[0,10]。此时应调节螺旋桨转速n、转矩T实现飞艇定点保持,即取得飞艇速度最小,同时应获得螺旋桨(直流无刷电机)的最低功率W、最大推力Ft及飞艇最高速度比δmax。这是一个多目标优化问题,最优目标函数描述如下[12-13]:
(6)
式中T(ua)、n(ua)构成了关于被优化参数W、Ft的多目标函数J(·),其中ua、v是决策变量,T、Ft和n是区间向量。根据实际情况可以取Fmax=88 328 N。当区间向量T、Ft和n在各自范围内变化时,希望电动推进系统功率最低。
2 飞艇动力系统目标函数的多目标优化
2.1 算法描述
目前,粒子群优化算法(Particle Swarm Optimization Algorithms,PSO)是国际认可度较高的多目标优化算法,性能也较为优异[14-15],因此本文采用PSO优化目标函数。与传统的计算相比,粒子群优化算法是依据鸟类觅食的经验得到的启发。粒子群优化算法将每个优化问题的解看作是搜索空间中的一只鸟,在搜索多维度空间中以规定的速度飞行,它根据自身及同伴的飞行经验来动态调整飞行速度。这样鸟被假想为没有体积和质量的微粒(点),第i个粒子在d维空间里的位置表示为矢量xi=(xi1,xi2,…,xid),把飞行速度表示为矢量vi=(vi1,vi2,…,vid)。一切的粒子都有一个由被优化的函数决议的适应值,并且知道到目前为止自己发现的最佳位置Pi(称为粒子个体极值)和当前位置xi,这些可以看作是粒子自己的飞行经验。除此之外,每个粒子还知道到目前为止邻域中所有粒子发现的最佳位置Pn(称为粒子全局极值),这个可以看作是粒子同伴的经验。每个粒子使用下列信息改变自己的当前位置:(1)当前位置;(2)当前速度;(3)当前位置与自己最佳位置之间的距离;(4)当前位置与群体最好位置之间的距离。粒子群优化算法是一种基于迭代的优化工具,对于第t+1次迭代,每个粒子按如下公式进行变化[16]:
vij(t+1)=wvij(t)+c1r1(pij(t)-xij(t))+c2r2(pij(t)-xij(t)),
(7)
xij(t+1)=xij(t)+vij(t+1),
(8)
式中,w为惯性权重值;c1,c2为学习因子;r1,r2是[0,1]之间的随机数;vij∈[-vmax,vmax],其中vmax为用户设定的最大粒子速度;i=1,2,…,N,N为粒子群规模;j=1,2,…,d。
该算法通过动态变化惯性权重值w和学习因子c1、c2,可以达到均衡MOPSO全局搜索能力和局部搜索能力的目的。
为进一步提高PSO算法的优化性能,本文对基本粒子群优化算法改进如下:
w=0.5(tmax-t)/tmax+0.4,
(9)
c1=(0.5-2.5)t/tmax+2.5,
(10)
c2=(2.5-0.5)t/tmax+0.5,
(11)
式中t为进化代数,tmax为终止代数。
由式(1)—(5)及所给参数可将优化函数(6)转换为最小化问题:
(12)
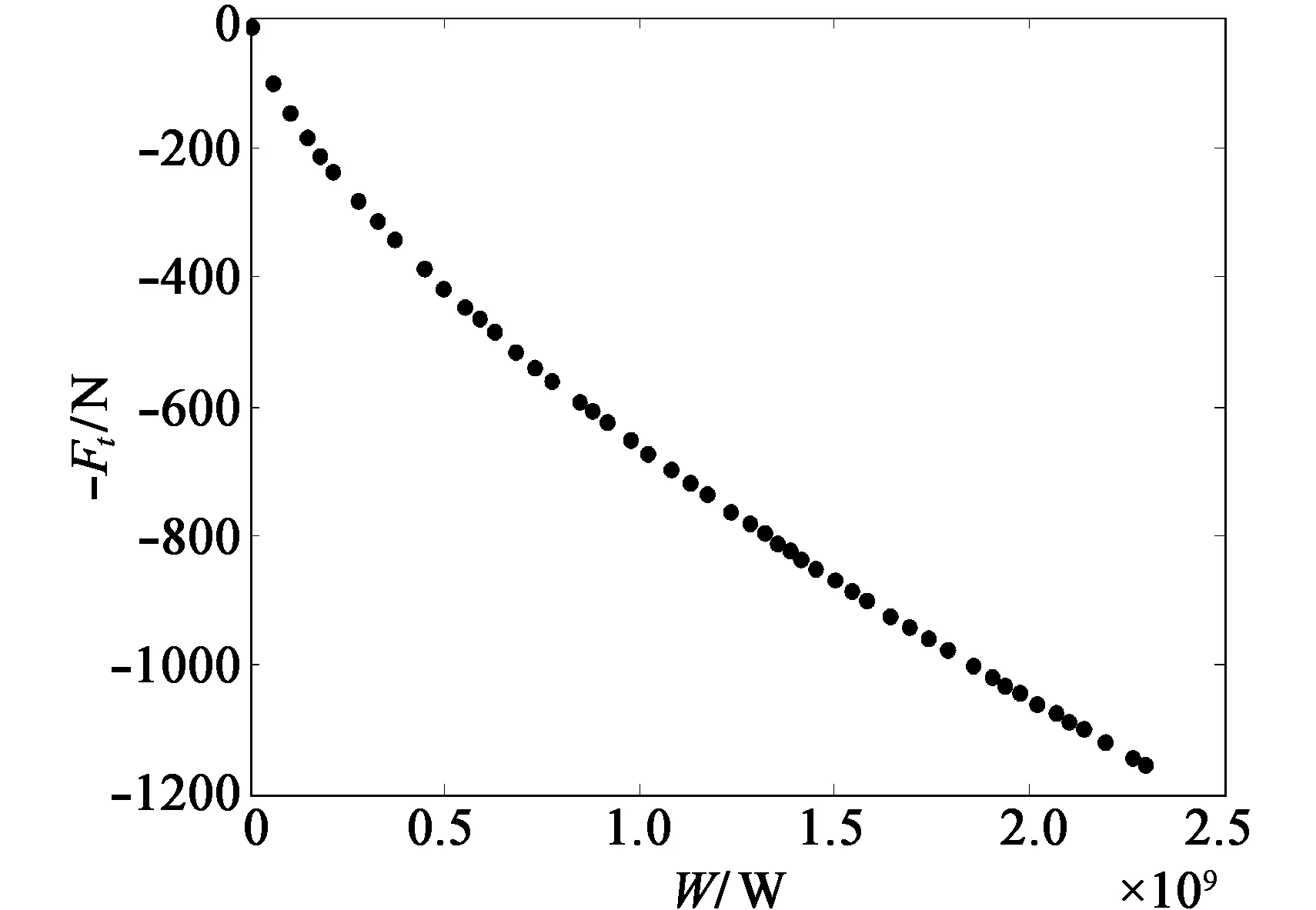
图1 优化所得功率W-推力Ft曲线
式中v(单位:km/h)是飞艇速度。以螺旋桨转速n和飞艇速度v为函数变量,它们的上下界分别为[300,3 000]和[0,10]。相关参数设置:算法终止代数tmax=200,种群规模N=50。需要说明的是,由于式(12)已经包含转速,所以优化指标中不再包含飞艇最高速度比δmax。
2.2 优化结果
采用PSO多目标微粒群优化算法求解上述问题所得优化结果如表2所示,图1展示了这些结果的可视图。
图1中纵坐标是推力Ft(单位:N),横坐标是电机功率W(单位:W),其中推力具有反向作用,故方向为负。

表2 变量解及其对应的函数值
可以看出,经过200次迭代,时变多目标微粒群优化算法成功求得了问题的Pareto前端。比如发动机的转速允许的变动范围是300~3 000 r/min。由表2第4组和第20组数据可以看出,当飞艇高载荷时,转速达到最大值2 984.759 7 r/min,此时推力相对较大,满足飞艇在空中平稳飞行,不受气流等影响;当转速为最小值883.298 7 r/min时,推力需求也最小,并且功率最小。可以看出,推力F 从表2可已看出,优化结果均符合约束条件,这意味着优化结果满足了平流层大气环境对飞艇载荷高、推力大、平稳性强的技术要求。 本文采用改进的粒子群算法实现平流层飞艇推进系统多目标优化。针对平流层大气环境对飞艇的载荷高、推力大、平稳性强等的特点,设计合理的多目标约束条件。优化结果达到了飞艇电推进系统低功耗、大推力等性能指标。3 结 语
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
北京航空航天大学学报(2022年5期)2022-06-06
航空发动机(2020年3期)2020-07-24
兰台世界(2017年10期)2017-06-01
高原山地气象研究(2016年1期)2016-11-10
太空探索(2016年12期)2016-07-18
百科探秘·航空航天(2015年12期)2015-11-07
百科探秘·航空航天(2015年12期)2015-11-07
百科探秘·航空航天(2015年11期)2015-11-07
百科探秘·航空航天(2015年10期)2015-11-07