
基于重叠网格的规则波中船舶运动数值预报方法
2018-11-07 01:34高鉴
兵器装备工程学报 2018年10期
高 鉴
(海军工程大学 舰船与海洋学院, 武汉 430033)
船舶耐波性是评估船舶航行性能的重要指标,准确地预报船舶在波浪中的运动响应是船舶设计阶段的重要任务。基于CFD数值仿真的方法为船舶设计者提供了理想、便捷的水动力性能评估手段,相比于模型试验,极大地降低了投入成本。
近年来,随着计算机性能的不断提高及计算流体力学的逐步发展,国内外学者通过建立数值水池预报波浪中的船舶运动已取得显著成果。Carrica[1]应用单相流Level Set方法对船模在波浪中的运动进行了求解计算;Simonsen C D[2]基于势流软件AEGIR与粘流软件Star-CCM+对KCS船模规则波中顶浪运动进行了数值模拟;Tezdogan[3]应用RANS方法预报实尺度船波浪中的运动响应;Mousaviraad[4]应用TWG方法预报船舶运动在迎浪中的运动响应;吴乘胜等[6]先后基于CFD方法分别对短波中顶浪航行船舶尾伴流特性及规则波中Wigley船模的纵摇和垂荡运动进行了数值预报及分析;王硕等[7]基于整体动网格技术对滑行艇波浪中运动开展了数值模拟,计算流体动力学技术可以准确且高效地模拟滑行艇波浪中高航速航行时的运动姿态和水动力特性;段文洋教授团队[8]使用重叠网格技术和流体体积函数方法,开展了零航速和有航速下船舶自由横摇衰减的数值模拟,通过与试验值对比验证了方法的可行性;缪国平教授团队[9]基于计算流体动力学理论,结合重叠网格方法,对三维舭龙骨船体的自由横摇衰减运动及强迫横摇运动进行了数值模拟研究,验证方法可行性的基础上开展了影响要素分析。
尽管众多学者已经验证了CFD方法预报船舶运动的有效性,但由于算法及操作者的诸多不确定性,且所构建方法的船型适用性不同,数值方法的准确性和计算精度经常受到质疑,因此需针对研究船型进行分析,并基于模型试验结果进一步开展细化研究工作。
本研究基于URANS VOF求解器,融合重叠网格技术,建立了适用于排水型船波浪中运动响应预报的数值水池,以DTMB 5512船模为研究对象,开展了不同工况下船舶顶浪中航行的数值模拟,并将计算结果与试验值对比,分析了方法的可行性。
1 数学模型
1.1 控制方程及湍流模型
本研究中以RANS方程作为求解船舶波浪上运动的基本方程如下:
(1)
式中:ρ为流体密度;μ为流体黏度;p为静压;fi为单位质量的质量力;ui、uj为速度分量。
为使RANS方程封闭,湍流模式选取SSTk-ω模型。下面仅给出该模型的数学表达式,详细推导过程和各参数的选取可参考文献[10],其方程如下:
(2)
(3)
式中:Γκ和Γω表示κ和ω的有效扩散率;Gκ表示由于平均速度梯度产生的湍流动能;Gω表示特殊湍流动能耗散ω的产生;Yκ和Yω表示由于湍流κ和ω的耗散;Sκ和Sω为用户自定义源项。
1.2 重叠网格技术
较动态变形网格技术,重叠网格技术简化了网格拓扑结构,增强了网格普适性。应用重叠网格技术模拟物体空间运动时,将计算域分为背景域与运动域,然后分别对各子域进行网格离散,域间通过空间插值实现流场信息交互。
如图1所示,在进行潜体运动求解时,设定背景域相对大地坐标系固定不动,同时在潜体周围建立运动域,运动域随潜体实时运动,域内网格不发生相对变化,通过挖洞计算实时确定域间边界,背景域中被挖掉的网格不参与计算,边界点外两域重叠部分进行数据空间插值完成流场信息的传递。
重叠网格计算的关键在于确定子网格之间的数据插值传递关系,主要包含挖洞和插值两个步骤。挖洞是指在流场计算前从网格中屏蔽掉一些不必要或者无实际意义的部分(如物体壁面内部)。具体而言,是在需要屏蔽的区域周围设置挖洞面,然后将落入挖洞面内的网格点标识出来,并在计算过程中予以舍弃,寻点则是指在网格中寻找插值点的贡献单元与接受单元。本文在开展计算时,贡献单元与接受单元的插值选取基于距离加权平均的方式,即距离接收单元越远插值系数越小,具体计算接受单位流动信息的公式如式(4)。
(4)
式中:φa为接受单元流场信息;φdi为第i个贡献单元的流场信息;ri为第i个贡献单元与接受单元体积中心的距离。
1.3 研究对象
本文以DTMB 5512模型为对象,其为ITTC(International Towing Tank Conference)推荐的用于CFD计算验证的标模之一,船模主参数如表1所示,模型带有方形尾板及用作声纳导流罩的球首, IIHR(Iowa)针对该船模开展了系列试验,并公布了较为详细的试验数据[11],可为数值方法的可行性验证提供依据。
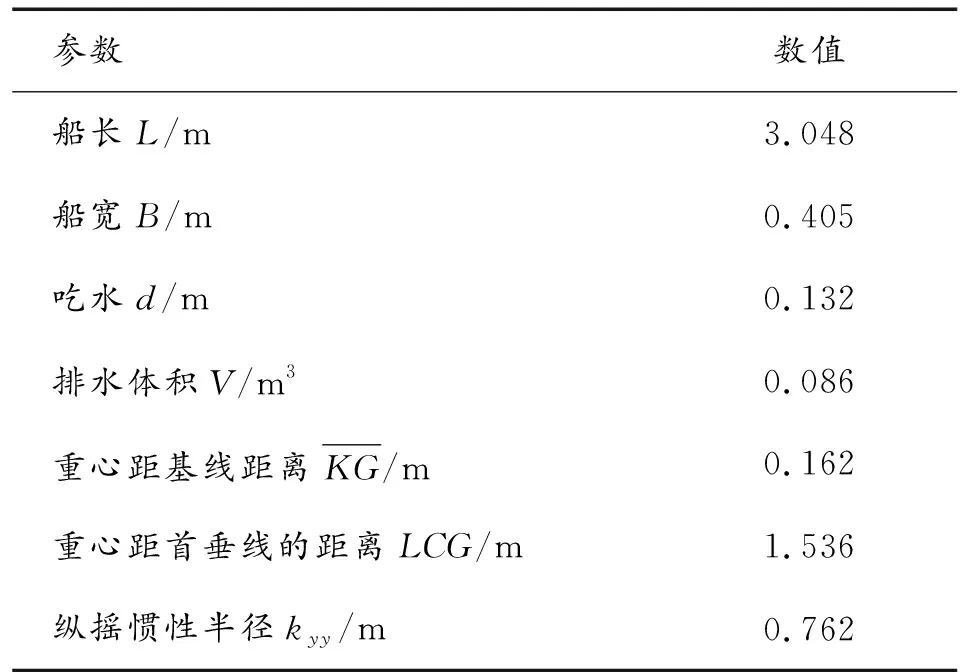
表1 DTMB 5512模型主参数
1.4 计算域及网格划分
在求解船模运动时,在船体周围建立较小的重叠网格域,该域随船模运动,为减小计算量取一半船模开展计算,重叠网格域大小设定为4.57 m×0.81 m×0.92 m,参照试验条件,设置背景域大小及边界条件如下(如图2所示,其中L为船长):
1) 入口:入口距离船体首垂线1倍船长,边界条件均设置为速度入口;
2) 出口:出口距离船体中心4倍船长,边界条件设置为压力出口,压力为未扰动时边界压力;
3) 流域的上、下及右边界设置无滑移、不可穿透壁面;
4) 流域左边界边界条件设置为对称面;
5) 船体表面定义为无滑移、不可穿透边界条件,边界条件设置为无滑移壁面。
网格离散是船舶运动预报准确度的重要影响要素,文中采用切割体网格对计算域进行离散,为提高预报精度,在船模周围可网格加密,使得网格的质量及密度均满足计算要求,同时为确保能够准确地捕捉两相流自由液面,如图3所示,在船体吃水附近及波形扩散范围进行网格加密。此外,由于重叠网格域与背景域通过插值实时传递流场信息,为减小插值误差,对两域交界处的网格进行了相近尺度加密处理。
2 数值造波可行性分析
在模拟船舶波浪中运动时,首先需要模拟水池造波,STAR CCM+的VOF Wave模块可以在RANSE求解器中直接通过速度入口和压力出口的函数控制完成线性波(一阶波)的造波与消波。根据线性波浪理论造波,有限水深下的波浪参数满足:
(5)
式中:ω为圆频率;g为重力加速度;k为波数;a为波幅;U为边界入口处的流体速度;x和z分别为纵向和垂向的坐标位置。
在进行波浪中船模运动模拟时,建立了与试验边界相同的长方体区域,按前文所述建立速度入口及压力出口边界条件,设置波浪参数,选取波长λ=4.572 m(λ/L=1.5),波高Hw=0.363 m的无限水深线性波为例,计算开始后,波形向压力出口方向传播,图4给出了初始化后及波浪完全形成后的自由液面波形,可见波面附近的网格可以清晰表达波形。此外,由于计算域大小有限,波浪的传播会影响域边界,为确保压力边界条件的稳定性,在距离压力出口1倍船长区域内添加阻尼项,实现消波功能。
3 计算工况及结果
为验证计算方法的有效性,结合试验工况,选取航速的船长傅氏数Fr= 0.19,0.28及0.41下,波长与船长的比值λ/L=0.5 ~ 2.5范围内,开展船舶运动的数值模拟,其中波幅a与波数k的乘积均取为0.025。
图5~图7为不同工况下船模垂荡运动及纵摇运动响应幅值的数值计算结果与试验值,其中z/a与θ/ak分别为垂荡运动与纵摇运动幅值的无因次表达由图可得结论如下:
1) 在研究范围内中长波下,船舶垂荡及纵摇运动响应预报相对误差在20%以内,满足工程需要;
2) 在短波中特定工况下船舶运动预报值相对较大,主要原因在于在短波下船舶垂荡及纵摇运动的响应幅值绝对值较小,且当前应用的数值造波方法模拟长波的精度高于短波;
3) 在高航速下(Fr= 0.41),船舶垂荡与纵摇在λ/L=1.5附近会出现峰值,而在高航速下垂荡运动峰值的预报结果与试验值存在一定偏差;
4)在高航速下垂荡运动峰值预报结果误差较大,可能由以下几点造成:① 在高航速下船模周围会发生飞溅,而应用VOF方法难以捕捉到该现象;② 目前的湍流模型在船体高航速下运动模拟时存在较大误差,有待进一步修正;③ 船模在高航速下的运动幅度较大,在计算过程中设定的重叠网格域与背景网格域的配合性相对较差。
4 结论
基于Star-CCM+内嵌的DFBI(多自由度求解器)及VOF模型,应用重叠网格技术开展了DTMB 5512船模波浪中运动的数值模拟,给出了从低航速至高航速范围内,波长λ/L在0.5~2.5时船舶垂荡与纵摇运动响应幅值的预报结果,通过将计算结果与试验结果进行对比分析可知,该方法适用于船舶波浪上运动的预报,预报结果精度较高,可用于指导船舶设计及性能优化。
猜你喜欢
水上消防(2022年1期)2022-06-16
导航定位学报(2022年3期)2022-06-10
绵阳师范学院学报(2021年2期)2021-02-04
海洋开发与管理(2020年2期)2020-09-10
新生代(2018年16期)2018-10-21
舰船科学技术(2018年7期)2018-07-25
中国水运(2014年12期)2015-01-09
计算技术与自动化(2014年1期)2014-12-12
小学生时代·大嘴英语(2014年6期)2014-11-04
航海(2014年4期)2014-08-28
