
汽车稳态回转试验中方向盘对试验一致性影响研究
2018-12-28 11:54曾柯何大军王倩
汽车实用技术 2018年23期
曾柯,何大军,王倩
(重庆车辆检测研究院有限公司,国家客车质量监督检验中心,重庆 401122)
关键字:汽车稳态回转试验;试验重复性;数据一致性
引言
汽车的操纵稳定性是决定汽车在高速行驶下安全性的重要因素之一[1]。有的文献定义, 汽车的操纵稳定性是指驾驶员在正常行驶过程中,当遇到外界干扰时,车辆能够有效抵抗干扰而恢复初始行驶状态的能力[2]。随着我国经济的快速发展,人们的出行需求日益凸显,因此这就对车辆本身的操纵稳定性提出了更高要求[3]。影响汽车操纵稳定性的因素包括:重心位置、车轮侧偏刚度、转向系刚度、转向系传动比、后轴侧倾转向系数及整车绕垂直轴的转动惯量等[4]。
稳态回转试验是整个操稳试验类型中一个重要权重占比很大的试验,具有一票否决权[5],但是在实际的过程应用中经常会出现同一台车在相同工况下试验重复性和数据分析结果一致性差的问题,已有文献[1]指出,操稳试验中试验数据处理是较大的难点,也有文献[5]指出,对于试验条件、试验方法、及数据处理方法的微小差别,结果往往相差很大。但是还鲜有文献提出切实有效的方法来解决操稳试验中试验数据的重复性及一致性问题,因此本文将操纵稳定性试验中稳态回转试验作为研究对象,研究车辆在相同工况下方向盘控制这一因素对试验重复性和数据结果一致性的影响,并提出改进方法,以提高重复性和一致性。
1 试验方法及影响因素
稳态回转试验是操纵稳定性试验集中一种非常经典的测试汽车操纵稳定性的试验方法,现行试验标准可参考[6]GB/T 6323-2014。根据标准在试验之前需要对被试汽车及试验场地环境进行确认,例如试验之前需要测定车轮定位参数及轮胎状态,若使用新轮胎则需进行200km行驶距离的磨合,若使用旧轮胎则试验结束时轮胎花纹深度应大于等于1.6mm,同时应通过以下两者之一的方法时轮胎升温,分别为直线行驶10km或绕15m半径圆周以3m/s2的侧向加速度行驶500m;检查底盘悬架及转向系,若有异常或松动需进行调整和紧固,并同时检查厂家规定的技术条件与实际是否相符。另外试验场的场地与气象条件也格外重要,要求场地干燥、平坦,为沥青路面,坡度在2%以内,风速5m/s以内,温度范围为0℃~40℃。
试验中应控制车辆转弯半径,使其转弯半径为不小于15m的圆周,并同时记录下此时的方向盘转角,作为重复试验回转圆半径大小的量化指标。在加速过程中应保持缓慢且均匀地加速,其纵向加速度应控制在0.25m/s2以内。左右方向各进行3组试验。
本次试验所用到的仪器,待测物理量,分析方法及评价指标如下表1所示。

表1 稳态回转试验使用仪器、测试物理量及分析方法
试验数据后处理过程除了实测物理量之外,还需要计算一些中间过程物理量,例如转弯半径、转弯半径比和前后轴侧偏角差值。转弯半径的计算公式如下式(1)。

式中,Rk为第k点转弯半径;vk为第k点实测速度;γk为第k点实测横摆角速度;通过转弯半径Rk与侧向加速度拟合之后的曲线中找到侧向加速度为0m/s2时所对应的Rk值定义为初始半径R0。
汽车前后轴侧偏角差值δ1-δ2计算方法如下:

式中,δ1为前轴侧偏角,δ2为后轴侧偏角,L为车辆轴距。前后轴侧偏角差是一个很重要的中间过程物理量,因为最终的中性转向点的侧向加速度与不足转向度都是通过前后轴侧偏角差与侧向加速度关系曲线处理得到,而前后轴侧偏角差又与R0和Rk有紧密的联系,R0的计算跟Rk曲线的走势以及和截取的时间段有关,Rk最终和汽车的加速度过程和加速策略紧密相关的速度vk和横摆角速度γk有关。
2 软硬件平台搭建
考虑到试验过程中复杂的工况,狭小的空间位置,较多的不确定因素以及试验人员仪器操作中防错性,需要搭建一整套高精度,高可靠性,高模块化程度和高防错性的硬件试验平台。本文试验中硬件平台采用了陀螺仪作为动态传感器,测力方向盘作为方向盘扭矩和转角传感器,GPS天线作为定位数据传感器,集成的数据采集器以及适应严酷环境的高性能PC上位机。硬件平台搭建逻辑如下图1所示。
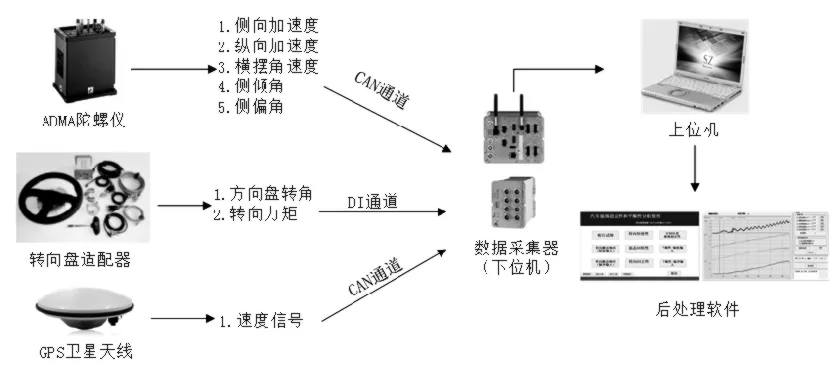
图1 硬件平台逻辑关系图
其中陀螺仪采用的是 ADMA整车动态性能分析仪,是带 DGPS(差分全球定位系统)的高精度陀螺测量系统。使用 ADMA还可以持续不间断地测量俯仰角、侧倾角和轨迹切线角,同时还能测定偏转角和偏转率。同样也能精确测定侧偏角。测力方向盘采用奇石乐公司开发的KiMSW 测量方向盘专为乘用车和多功能车型测试而设计。数据采集系统采用 imc公司开发的 CRONOSflex,其基本单元提供了 imc CRONOSflex数据采集系统的核心功能。软件平台包括两部分,一部分是实时数据采集软件,一部分是数据后处理软件,都安装在上位机里;实时数据采集软件用来配置硬件模块参数,车辆配置参数,数据采集和实时分析等。数据后处理软件是用来对采集到的数据进行后处理分析,基于 imcFamos开发平台开发的稳态回转试验数据后处理软件交互性强,操作简单,省去了中间计算过程,能够快速得出分析结果,能够有效地提高数据处理效率,让研究人员能够将更多的精力用到试验研究本身上来。
3 稳态回转试验分析
3.1 试验车辆
在长期的试验工作中发现稳态回转试验的重复性和数据结果一致性很难得到保证,为了解决该问题,本课题开展了大量的试验工作积累了大量的试验数据,从试验数据结果初步分析来看发现方向盘对试验结果有很大的影响。为了研究车辆稳态回转试验中方向盘 波动性的影响,选择某款城市客车作为研究对象如图2,车型具体技术条件如下表2所示,在前文介绍的软硬件平台基础之上,进行稳态回转试验,试验地点为国家客车质量监督检验中心-重庆机动车强检试验场。

图2 试验车辆

表2 试验车辆参数
某次稳态回转试验如下,车辆的质心位置在距车前轴1836mm,距车纵向中心线左侧26mm,离车地板246mm处,将 ADMA陀螺仪通过支架安装在质心位置处,加速策略采用 1-2-3档逐级增加的策略,试验之初通过驾驶员肉眼和经验寻找回转圆半径,针对左侧进行回转试验,将得到的数据分析结果如下表3所示。从数据结果可以看出,三次重复性试验,计算得到的初始半径R0,不足转向度U和侧倾刚度K都有不同程度的差别,通过方向盘转角测量仪测得的三次试验,方向盘转角均值分别为-231.0度,-226.2度和-230.7度,对比7-18-1和7-18-2两次试验,在方向盘转角波动性即方向盘转角标准差一致时,研究方向盘转角不同对试验结果的影响,从表中可以看出方向盘转角不同,计算得到的转弯半径也不同,因为车辆方向盘转角的大小决定了回转圆半径的大小,所以方向盘转角可以作为回转圆半径的量化指标。
同时不同的方向盘转角对不足转向度U,中性转向点的侧向加速度an和侧倾刚度K均有较大的影响,这是由于采用驾驶员肉眼和经验来寻找回转圆半径的结果,这样寻找的回转圆半径会有很大的误差,如表3,7-8-1和7-8-2两组数据所示,反应到方向盘转角可以看出两次试验,方向盘转角差了 4.8度,如果寻找的回转圆半径不同,那么通过转弯半径与侧向加速度拟合曲线取侧向加速度为0km/h时的转弯半径为初始半径 R0值就不同,进而汽车前后轴侧偏角差值计算就会受到 R0值的影响,那么汽车前后轴侧偏角差与侧向加速度拟合曲线取侧向加速度为 2m/s2时的斜率即不足转向度U就会受到影响,因此若通过驾驶员的肉眼和经验选择回转圆半径就很难保证2次重复试验的试验结果一致性。
因此本文提出采用方向盘转角作为度量回转圆半径的指标,GB/T 6323-2014规定回转圆半径不得小于15m,因此在试验之初可以尝试不同的方向盘转角使得在正式试验开始时固定某一初始方向盘转角下回转圆半径不小于15m,并记录下此时方向盘转角,在进行重复试验时只需将方向盘转到该角度进行试验,就能保证每次试验的回转圆半径基本一致。

表3 第一次试验数据统计表
采用了方向盘转角作为量化回转圆半径大小的指标后,就可以在确定回转圆半径大小一致性情况下研究驾驶员控制方向盘在确定角度下的波动性即标准差对试验结果的影响,从表3中7-18-1和7-18-5可以看出在方向盘转角一致情况下,在整个试验过程中方向盘转角标准差不同对初始半径R0和不足转向度U均有较大影响,从图3(a)、(b)、(c)可以直观地看出3次重复试验的整个试验过程中方向盘转角随时间变化曲线,方向盘的波动一般在几度和十几度之间。这主要是由于在试验的过程中车身随路面的随机振动叠加上驾驶员手臂的随机抖动,就会使方向盘转角试验过程中并不是完全固定的,而是波动的,这种随机波动会直接对车辆的速度和横摆角速度产生直接的影响,由公式可知转弯半径 Rk是跟速度和横摆角速度直接相关的,这种随机波动进而会影响到Rk使初始半径 R0的计算结果增加了一定的随机性,再由公式可知R0的随机性和Rk的随机性会传递到前后轴侧偏角差值使得侧偏角差与侧向加速度拟合曲线横轴为 2m/s2处的平均斜率测不准。
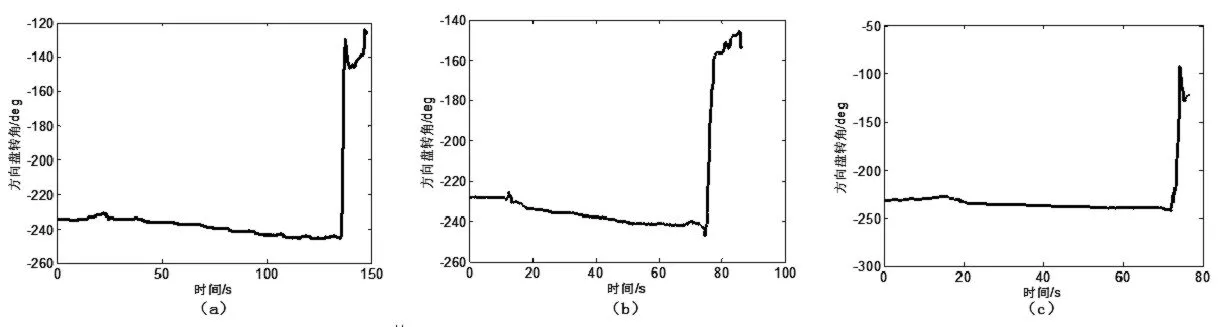
图3 第一次试验方向盘转角曲线
为了解决方向盘波动性的影响,本文采用方向盘固定装置在每次试验中固定方向盘转角。
采用上述方法进行试验,同样将 ADMA陀螺仪通过支架安装在质心位置处,加速策略采用 1-2-3档逐级增加的策略,参考地面半径15m圆线寻找回转半径使得回转半径不低于15m,确定当方向盘转角为297度时回转半径大于15m,采用本文设计的方向盘卡紧机构固定方向盘进行试验,右转方向进行3次重复试验得到如下表4所示结果。从表中可以看出三次试验方向盘角度均值基本吻合,并且方向盘转角标准差控制在了0.6以内,得到的数据结果三次实验R0,an,U,K的一致性均很好,进一步印证了方向盘的波动性对试验结果一致性有很大的影响。

表4 第二次试验数据统计表
8-14-10,8-14-11和8-14-12三次试验方向盘转角随时间变化如下图4所示,从图中可以看出在试验中将方向盘固定后方向盘的随机波动变得很小,基本控制在了1度以内。

图4 第二次试验方向盘转角曲线
4 总结与讨论
本文针对汽车操纵稳定性试验中数据结果重复性及一致性差的问题从方向盘转角度方向展开了较为深入的研究,找到了控制方向盘转角的方法并提高了试验数据结果的重复性及一致性。可以得到如下结论:
(1)采用方向盘转角作为量化回转圆半径大小的指标能够解决凭驾驶员肉眼和经验寻找回转圆半径的误差,每次重复试验只需确保方向盘转角一致而无需重新找回转圆半径,这样可以解决因为回转圆半径的不同对试验数据重复性及一致性的影响。
(2)本文设计了一套方向盘卡紧机构,使方向盘转角在每次试验过程中角度能保持一致并且波动性达到最低,能有效地解决因为方向盘转角波动性对试验数据重复性及一致性的影响。
猜你喜欢
遗传(2022年9期)2022-10-10
大电机技术(2022年3期)2022-08-06
昆钢科技(2021年2期)2021-07-22
煤气与热力(2021年4期)2021-06-09
民用飞机设计与研究(2020年4期)2021-01-21
中华戏曲(2020年1期)2020-02-12
新课程·中学(2019年7期)2019-09-17
物理教学探讨(2018年1期)2018-02-13
考试周刊(2016年94期)2016-12-12
中学生数理化·高考版(2008年2期)2008-11-01
