
空间索杆张拉结构施工全过程分析
——以某会展中心鱼腹梁施工为例
2020-04-30 07:52吴武玄
福建建筑 2020年3期
吴武玄
(福州市建筑科学研究所 福建福州 350000)
0 引言
索杆张力结构施工成形分析需要解决一个松弛态索杆系统的平衡形态求解问题,该问题可归结为一个给定构件原长的受荷索杆机构系统的找形问题[1-2]。在索杆张拉结构施工全过程分析中,体系由刚度为零到具有很大的刚度,索由只承受自重到拉索绷紧,整个体系的分析,既有机构分析又有力学分析,实际上包含了找形分析和找力分析的过程[3]。
本文结合某会展中心鱼腹梁索杆张拉结构,采用MIDAS/Civil程序对鱼腹梁施工成形和施工控制方案进行分析[4-5],以期为施工安装提供参考依据。
1 工程概况
1.1 项目基本概况
某会展中心主要功能包含展览中心、会议中心及配套功能设施用房。地下1层,地上3层,局部设置夹层,建筑高度约为33m,局部挑高至45m,总建筑面积约为11.28万m2,其中地上建筑面积约8.2万m2,地下建筑面积约3.1万m2,其效果图如图1所示。

图1 某会展中心效果图
1.2 项目结构型式
该工程主体为装配式钢结构,在主要出入口处根据建筑外观需求在标高为+16.000m~+32.000m间平均设置三道鱼腹梁,跨度为34m,如图2所示。鱼腹梁截面型式如图3所示,共由16组索杆张拉成型,其中4组为直径32mm(鱼腹位置),12组为直径26mm(除鱼腹位置外其余索杆),索杆均为圆形拉索,材料屈服强度不小于515MPa。

图2 标高在+16.000m~+32.000m间设置三道鱼腹梁
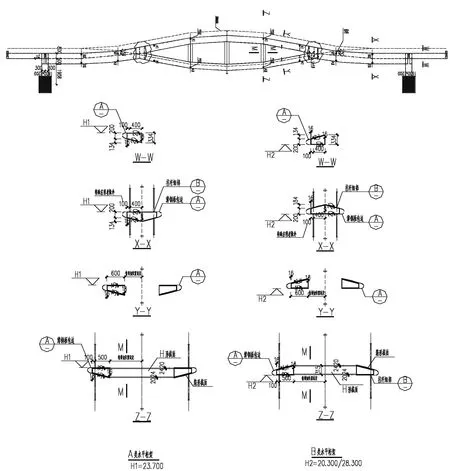
图3 鱼腹梁截面型式
2 施工过程数值模拟及分析
2.1 数值模拟分析模型
采用MIDAS/Civil软件进行正装施工过程分析。建模时,其中梁、柱、鱼腹梁构件采用梁单元,索杆采用索单元,胎架只起受压作用,直接采用弹性连接进行模拟,底层柱底固接。建模后分析模型如图4所示。
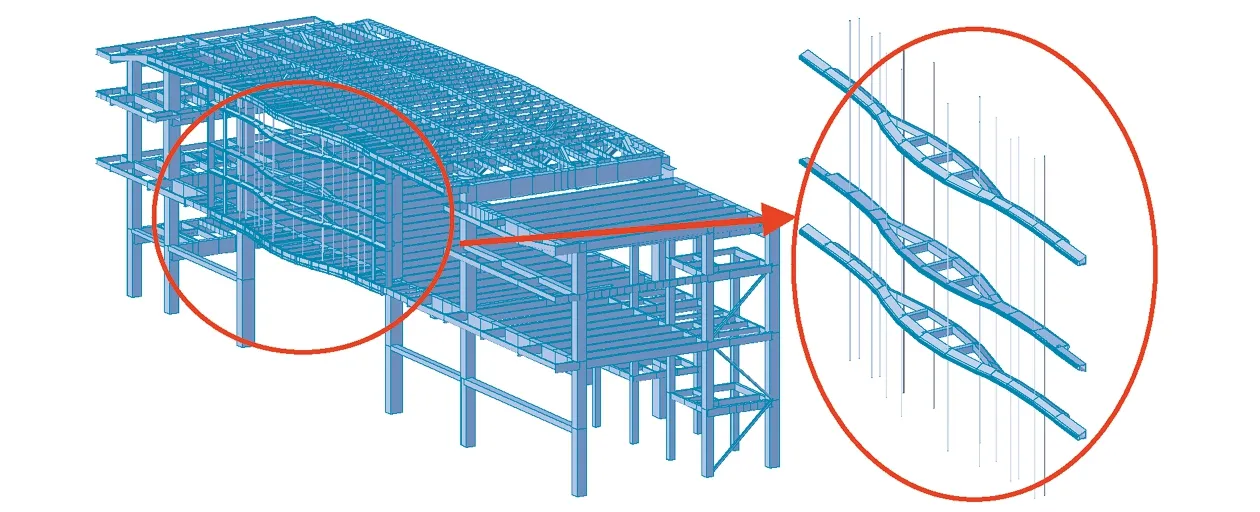
图4 MIDAS/Civil整体及局部鱼腹梁有限元模型
2.2 鱼腹梁找形分析
索杆和鱼腹梁所形成的零态,是指索杆初始绷紧成形但尚未施加预应力的状态,实际指构件加工和放样态,也称放样态。初始态是拉索张拉完毕后,结构安装就位的形态,通常也称预应力态,初始态即为建筑施工图中所明确的结构外形。因此,应先进行结构的找形分析,找到结构的初始态。通过MIDAS/Civil中的找形分析功能找到结构初始态下索杆的拉力,如图5和表1所示。

图5 各层索杆单元编号
表1 各层索杆初拉力 kN
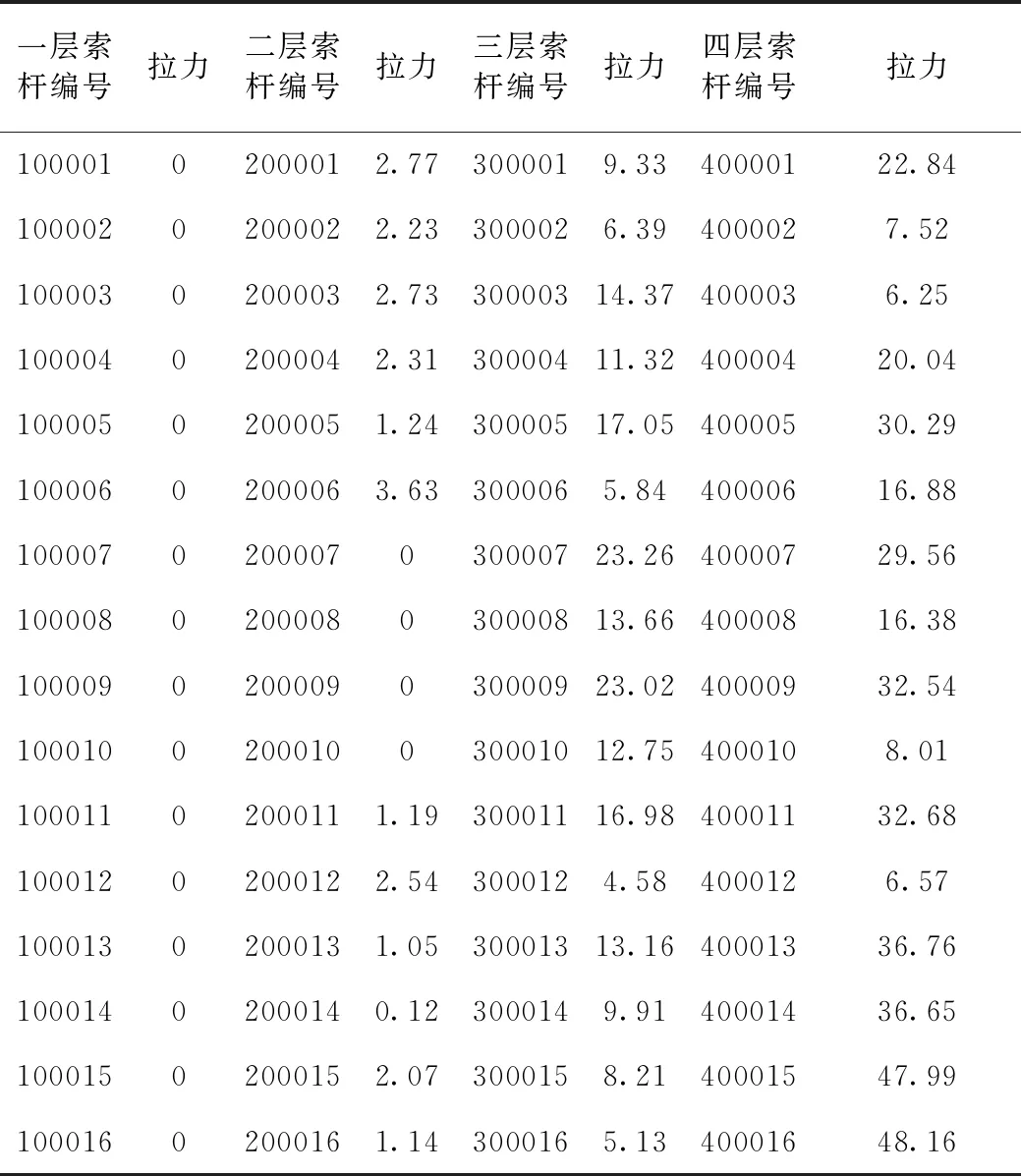
一层索杆编号拉力二层索杆编号拉力三层索杆编号拉力四层索杆编号拉力10000102000012.773000019.3340000122.8410000202000022.233000026.394000027.5210000302000032.7330000314.374000036.2510000402000042.3130000411.3240000420.0410000502000051.2430000517.0540000530.2910000602000063.633000065.8440000616.881000070200007030000723.2640000729.561000080200008030000813.6640000816.381000090200009030000923.0240000932.541000100200010030001012.754000108.0110001102000111.1930001116.9840001132.6810001202000122.543000124.584000126.5710001302000131.0530001313.1640001336.7610001402000140.123000149.9140001436.6510001502000152.073000158.2140001547.9910001602000161.143000165.1340001648.16
2.3 自平衡验证
通过MIDAS/Civil中的找形分析功能,可以找到结构初始态索杆的拉力,为验证结构在该拉力及自重作用下鱼腹梁是否处于初始态,需进行自平衡验证。同样,采用MIDAS/Civil进行模拟,可以得到在自重及索杆拉力共同作用下初始态下的变形,如图6所示。由图6可知,鱼腹梁的变形非常小(10-7mm),说明鱼腹梁达到自平衡状态,即结构初始态已找到。

图6 自平衡分析下的鱼腹梁的变形(单位:mm)
2.4 施工过程模拟工况
根据分析得到自平衡状态(建筑施工图中所明确的结构外形),再进行正装施工过程模拟,荷载主要考虑结构自重及初始态下的索杆拉力。具体模拟过程如表2所示。
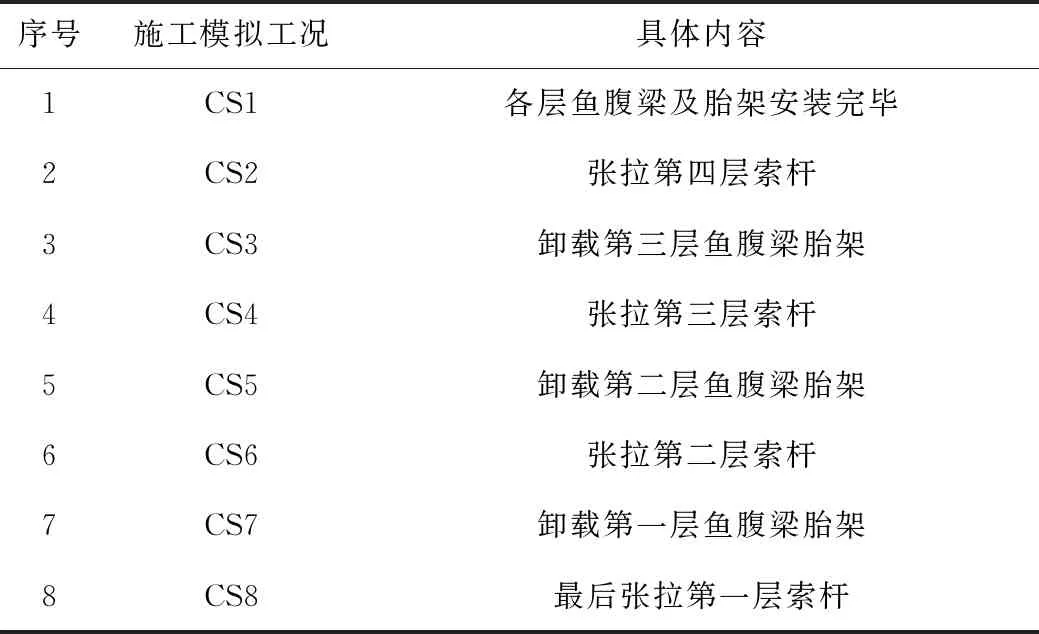
表2 施工模拟工况
2.5 正装施工模拟结果及分析
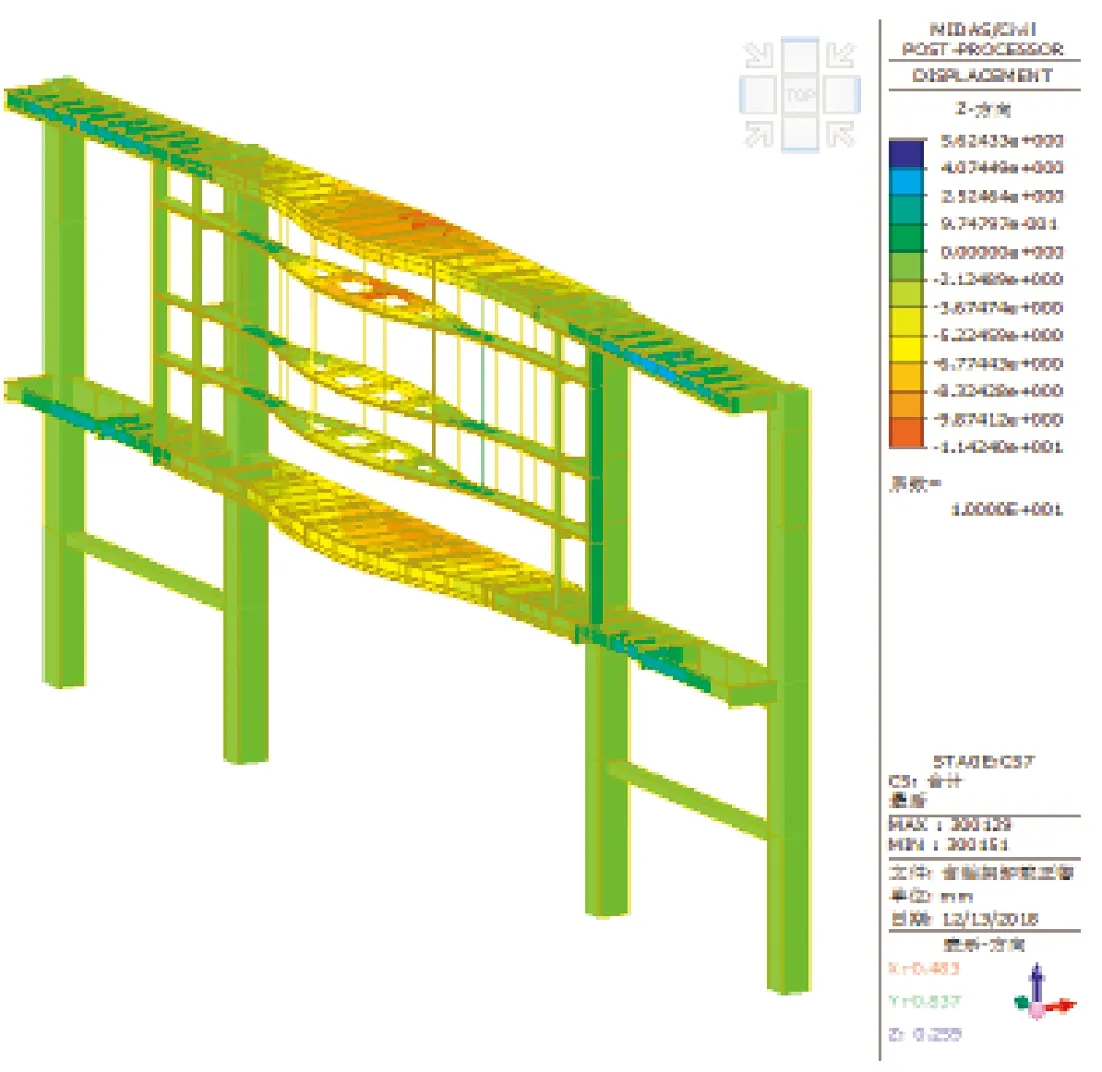
根据上述数值模拟过程,可以得到施工各阶段鱼腹梁的变形及索杆拉力结果,如图7~图11所示。由诸图可知,鱼腹梁在胎架临时支撑下(CS1阶段),各层鱼腹梁跨中最大竖向变形均为16.33mm,但各层索杆张拉后(CS8阶段),第三层鱼腹梁跨中竖向变形仅为11.43mm(挠度1/29746),第二层鱼腹梁跨中竖向变形仅为6.61mm(挠度1/51437),第一层鱼腹梁跨中竖向变形仅为3.75mm(挠度1/90667),说明安装完毕后各层鱼腹梁已完全满足初始态要求。

图7 CS1阶段鱼腹梁变形DZ(mm)
(a)鱼腹梁竖向变形DZ(mm)

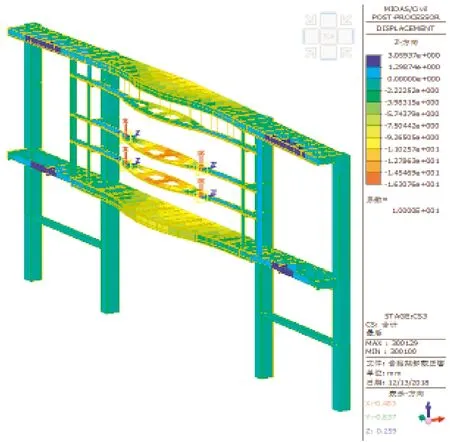
(b)第四层索杆拉力(kN)图8 CS3阶段鱼腹梁变形及索杆拉力
(a)鱼腹梁竖向变形DZ(mm)
(b)第三、四层索杆拉力(kN)图9 CS5阶段鱼腹梁变形DZ(mm)
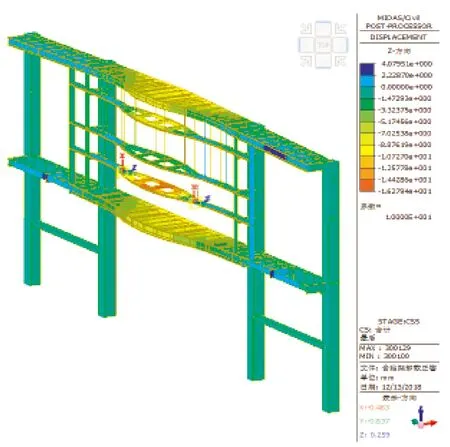
(a)鱼腹梁竖向变形DZ(mm)
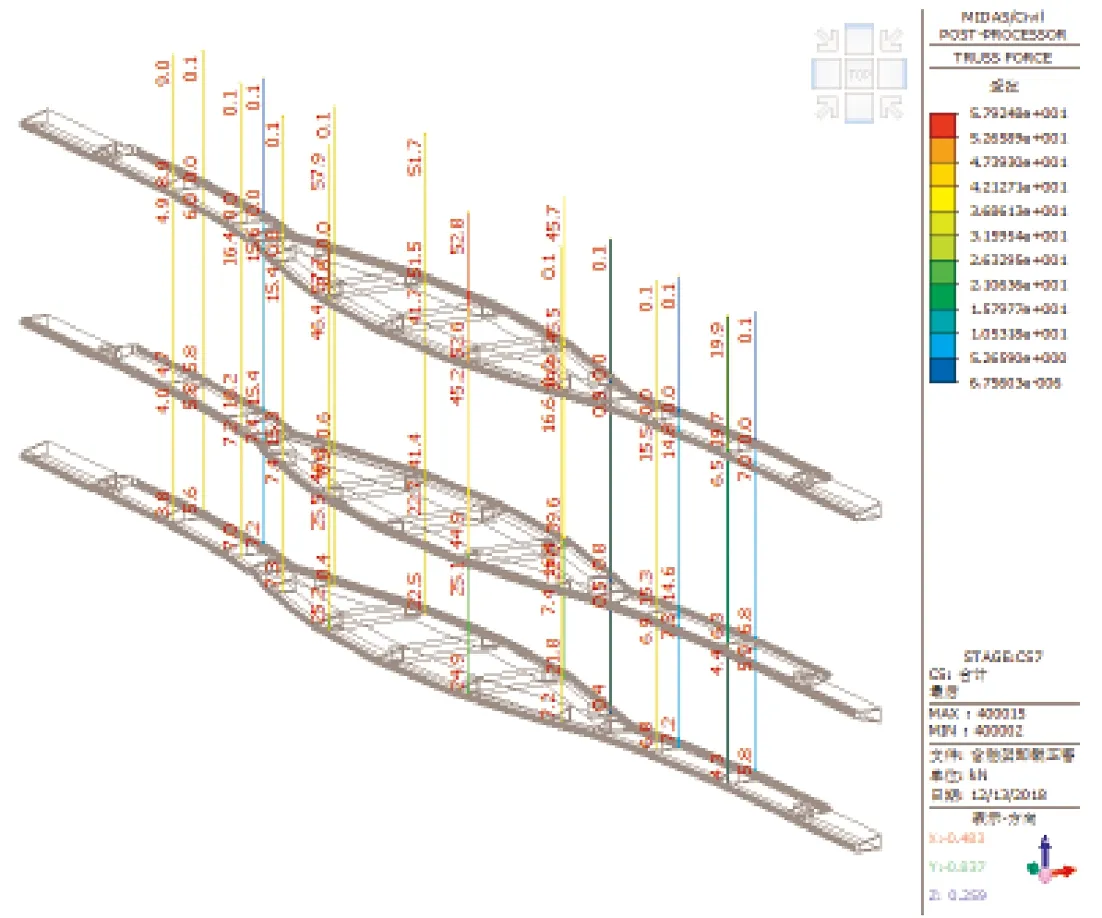
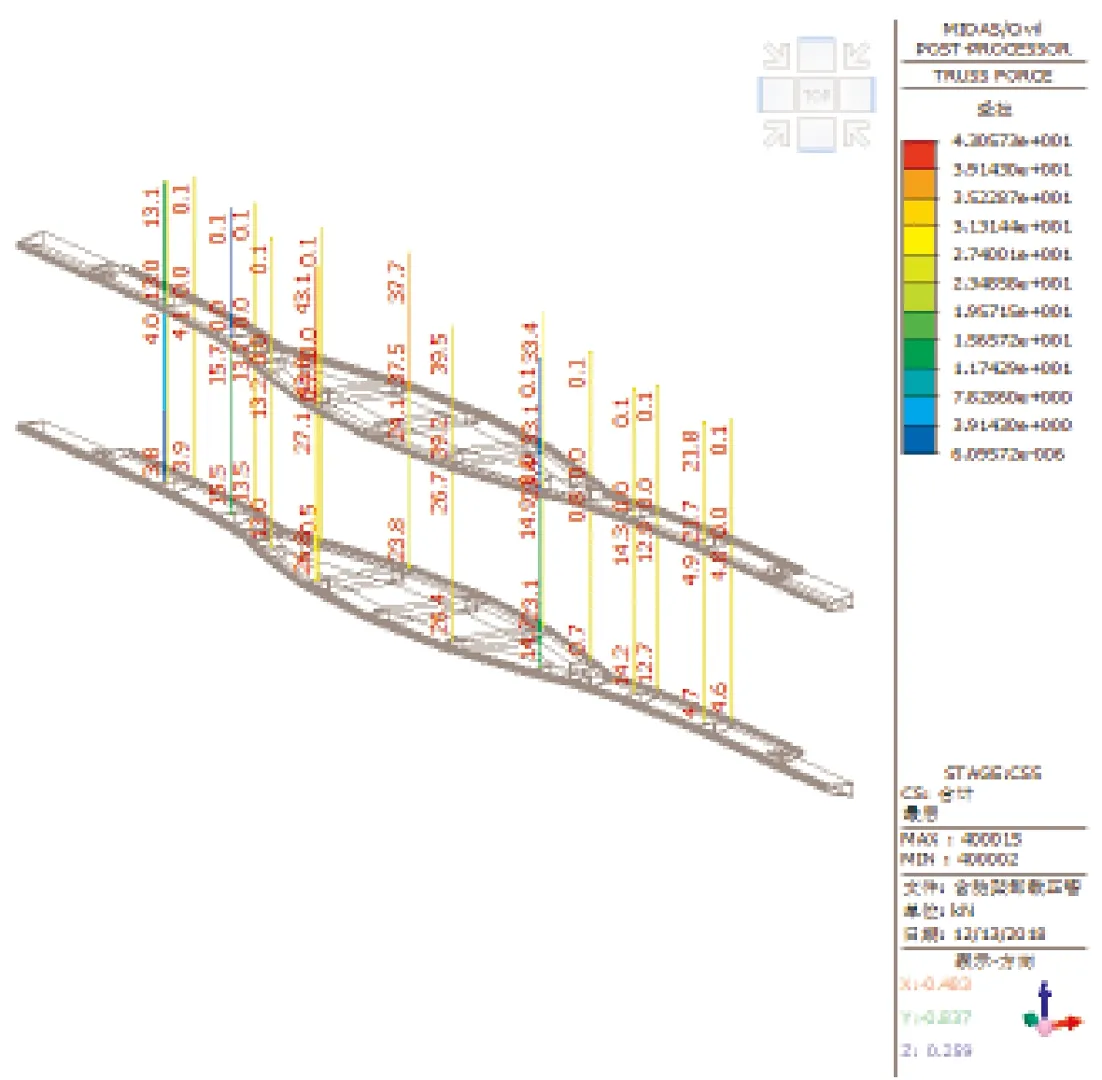
(b)第二~四层索杆拉力(kN)图10 CS7阶段鱼腹梁变形及索杆拉力

(a)鱼腹梁竖向变形DZ(mm)
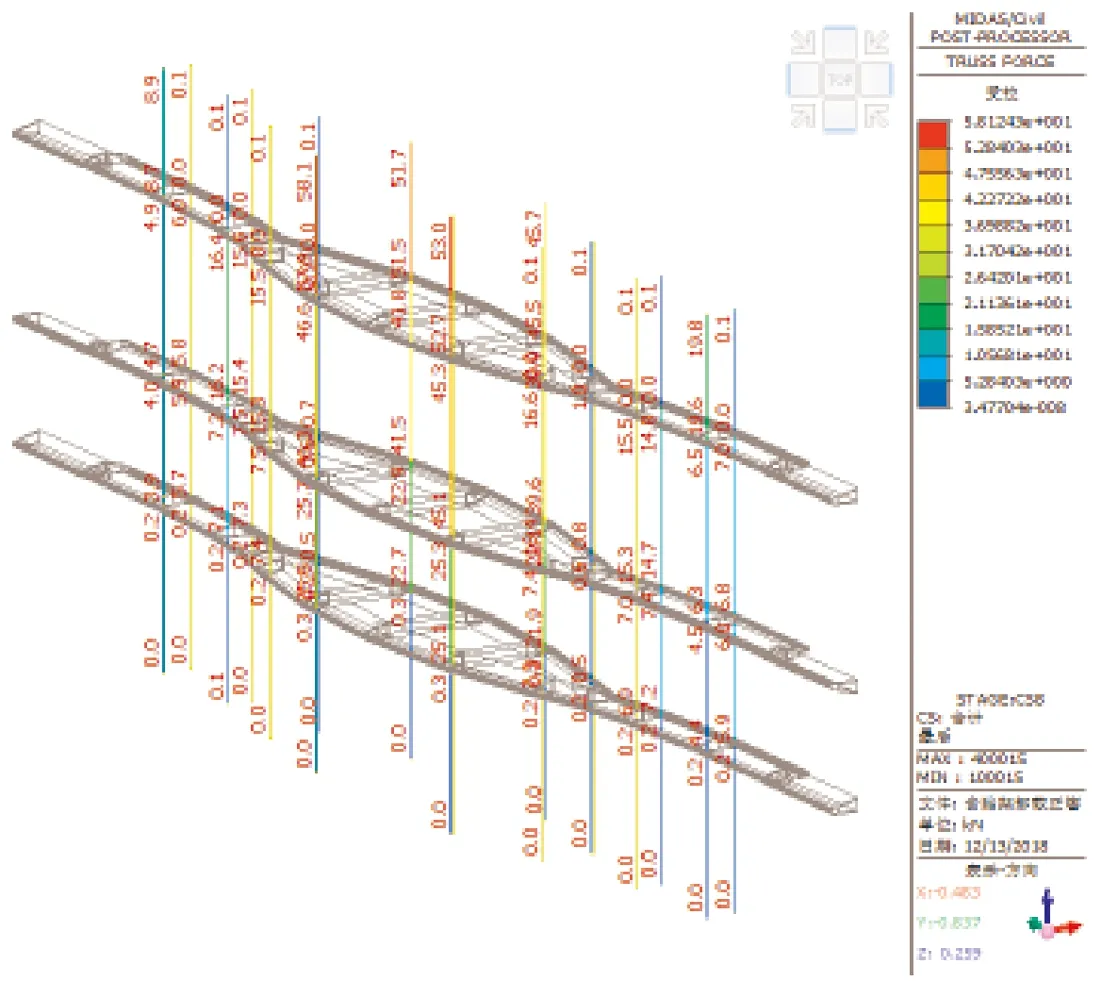
(b)第一~四层索杆拉力(kN)图11 CS8阶段鱼腹梁变形DZ(mm)
由图11(b)可知,鱼腹梁拉杆张拉完毕后第一层索杆在初始态下受力非常小(基本接近0),主要是由于第一层鱼腹梁自重和第二层索杆拉力处于平衡状态且底部悬挑梁刚度大和第一层鱼腹梁相对变形很小所致。
分析得到的施工阶段各层鱼腹梁跨中竖向变形变化曲线,如图12和图13所示。由图11~12可知,各层鱼腹梁在胎架卸载过程,其跨中变形基本保持一致,说明索杆和鱼腹梁自重已基本保持平衡,索杆张拉后胎架已经不起作用。另外,由CS8阶段变形与上一阶段变形基本一致,进一步说明了第一层索杆拉力基本为0,施工安装时直接张紧即可。

(a)第一层鱼腹梁跨中观测点(标高:20.300m)

(b)第二层鱼腹梁跨中观测点(标高:23.700m)

(c)第三层鱼腹梁跨中观测点(标高:28.300m)图12 各层鱼腹梁跨中观测点示意图

图13 各层鱼腹梁跨中观测点竖向变形Dz变化曲线(mm)
3 施工控制措施及步骤
3.1 施工控制措施
根据以上计算分析,可以得到施工过程各层鱼腹梁的线型和索杆控制拉力,从而为施工安装提供依据。安装过程应以“线型控制为主,拉力控制为辅”为原则。各层鱼腹梁施工过程控制措施如下:
(1)取CS3阶段的第四层索杆拉力作为第三层鱼腹梁张拉施工时的控制拉力,鱼腹梁各节点变形作为控制线型。
(2)取CS5阶段的第三层索杆拉力作为第二层鱼腹梁张拉施工时的控制拉力,鱼腹梁各节点变形作为控制线型。
(3)取CS7阶段的第二层索杆拉力作为第三层鱼腹梁张拉施工时的控制拉力,鱼腹梁各节点变形作为控制线型。
3.2 施工步骤
(1)安装各层鱼腹梁临时胎架,并吊装和拼接各层鱼腹梁,形成鱼腹梁张拉体系的零态。
(2)进行第四层索杆张拉和调整,按照上述措施控制索杆的拉力和鱼腹梁的变形,并卸载第三层鱼腹梁的胎架。
(3)进行第三层索杆张拉和调整,按照上述措施控制索杆的拉力和鱼腹梁的变形,并卸载第二层鱼腹梁的胎架。
(4)进行第二层索杆张拉和调整,按照上述措施控制索杆的拉力和鱼腹梁的变形,并卸载第一层鱼腹梁的胎架。
(5)最后将第一层索杆张紧即可,卸除所有剩余胎架,施工完毕。
4 结论
(1)空间索杆张拉结构受力和成形过程分析基础是进行几何非线性的找形分析,找到结构的初始态,并应进行自平衡验证。
(2)得到初始态索杆的拉力,方可进行正装过程的施工过程模拟,得到的施工过程各层索杆张拉过程的控制拉力及鱼腹梁的线型为施工安装提供了技术依据。
(3)根据理论分析结果,给出了具体的施工步骤及其控制措施,经施工实践验证表明,该理论分析正确,结构安全成型,达到预期设计效果,具有一定的工程参考价值。
猜你喜欢
山西建筑(2022年14期)2022-07-18
船舶标准化工程师(2022年1期)2022-02-17
商品与质量(2021年43期)2022-01-18
江苏科技大学学报(自然科学版)(2021年1期)2021-04-07
建筑施工(2020年7期)2020-11-10
航空发动机(2020年3期)2020-07-24
造船技术(2019年5期)2019-11-12
发明与创新·中学生(2018年2期)2018-02-07
时代英语·高二(2017年4期)2017-08-11
天津体育学院学报(2016年3期)2016-12-18
