移动闭塞下列车追踪运行研究
2020-06-29 03:53辛亚江刘万江
中国铁路 2020年5期
辛亚江, 刘万江
(中国铁路兰州局集团有限公司兰州电务段,甘肃兰州 730050)
0 引言
提高铁路运输效率最有效的2个方法是提速和增加运行密度[1],随着高速铁路的发展,提高列车运行速度已遇到瓶颈,但可以通过增加运行密度提高运输效率,即通过缩短列车的追踪间隔来实现,列车闭塞制式的发展就是通过该方法提质增效[2]。就最前沿的移动闭塞而言,目前仅在城市轨道交通中应用[3],下一代列控系统将全面实现移动闭塞制式的应用[4]。该制式下列车的追踪运行模式有撞“硬墙”模式和撞“软墙”模式[5]。2 种追踪模式相比,最大的特点就是撞“软墙”模式引入前车的速度信息,计算防护曲线时考虑前车也在运行,并非撞“硬墙”模式下前车静止[6]。
出于安全性的考虑,前期对撞“硬墙”模式研究较多,撞“软墙”模式近年来才有学者涉及。黄苏苏等[7]建立了考虑前车以理想状态紧急制动列车的紧急制动安全模型,可以缩短行车间距和追踪间隔。张友鹏等[5]设计了移动闭塞下列车运行的追踪间隔控制算法,实现了列车撞“硬墙”和撞“软墙”模式下的安全追踪运行,比较得出撞“软墙”模式的线路运营效率更高。罗志刚等[8-9]对列车追踪安全距离进行优化,增加前车速度信息,该算法能有效缩短最小安全间隔。刘畅等[10]研究了基于前车速度的列车追踪模型,较传统模型能大大缩短追踪距离。辛亚江[11]应用相对运动的观点理论分析2种追踪模式的效率和安全性。由此可知,撞“软墙”模式的效率高于撞“硬墙”模式,但撞“软墙”模式的安全性能限制其应用,在此结合2种追踪模式特点,提出准撞“软墙”模式,也可理解为对撞“硬墙”模式的改进。
1 2种追踪模式的物理模型
根据移动闭塞下列车追踪运行模式的概念和原理,首先建立撞“硬墙”模式和撞“软墙”模式的物理模型(见图1、图2)。
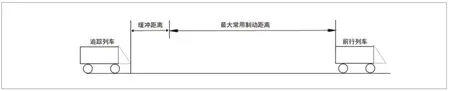
图1 撞“硬墙”模式的物理模型
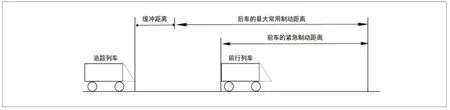
图2 撞“软墙”模式的物理模型
1.1 撞“硬墙”模式
如图1所示,在撞“硬墙”模式下,追踪列车和前行列车的最小追踪间隔距离为追踪列车的最大常用制动距离,该距离在任何时候都能使追踪列车安全停在前行列车的尾部,不会与前行列车发生碰撞,列车的安全性最高。
1.2 撞“软墙”模式
考虑到正常行驶列车速度不会跳变,最多是紧急制动,因此在撞“软墙”模式下,仅考虑最不利情况,即追踪列车的追踪目标点为前行列车紧急制动停车的位置[12]。
如图2所示,在撞“软墙”模式下,追踪列车所需制动距离的一部分被前行列车占用,但是随着追踪列车的前行,占用部分可以在追踪列车到来之前逐渐出清,为追踪列车腾出运行空间。追踪列车和前行列车的实际间隔距离很小,其最小间隔距离为追踪列车的最大常用制动距离和前行列车紧急制动距离的差值。前行列车在正常运行时的最不利情况下制动(紧急制动),追踪列车采用最大常用制动方式能够安全停在前行列车最终停车位置的尾部。如果前行列车以非正常减速度(大于紧急制动减速度)进行制动停车,或前行列车突然停车(速度发生跳变),前行列车来不及为追踪列车清出运行轨道,从而导致2 列车发生追尾事故。因此撞“软墙”模式的安全性问题亟待解决[13]。
2 准撞“软墙”模式
通过物理模型比较,2 种追踪模式特点明显,撞“硬墙”模式更安全,撞“软墙”模式更高效。
2.1 物理模型建立
结合这2 种模式的特点,设想在前后车之间始终保持一个很小的空闲间隔,这个间隔保证追踪列车在任何情况下均能停在前行列车的尾部,即撞“硬墙”模式保证。但正常运行时,后车的追踪目标点设在前车此刻若紧急制动最终停车的位置,即列车按撞“软墙”模式进行追踪运行。采用该设想,提出准撞“软墙”模式,该模式不是一种新的追踪运行模式,而是结合撞“硬墙”模式和撞“软墙”模式,选择合适的制动挡位对列车进行共同防护。准撞“软墙”模式的物理模型见图3。
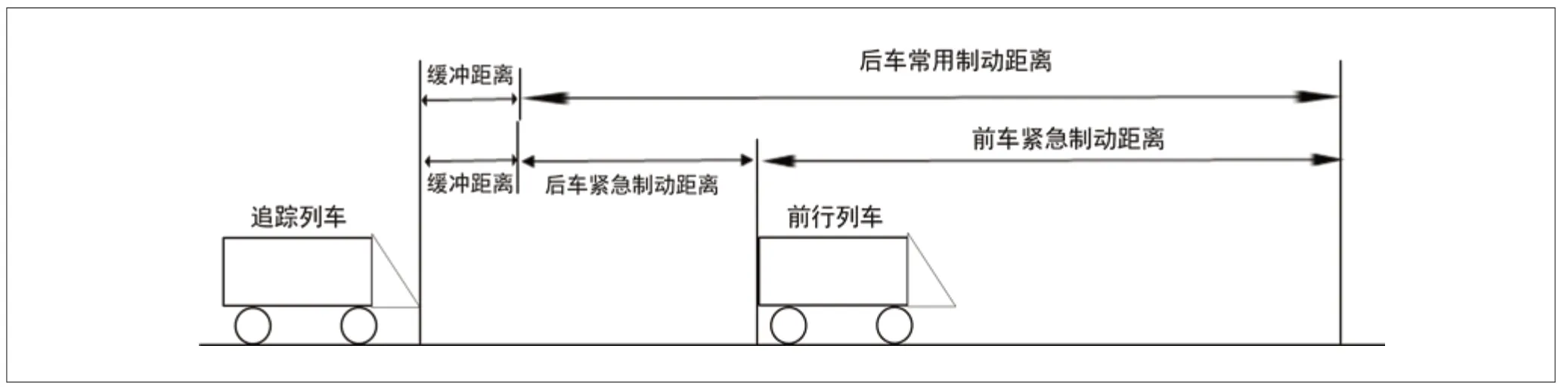
图3 准撞“软墙”模式的物理模型
该模式结合撞“硬墙”和撞“软墙”模式特点,缩短了2 列追踪运行列车间的间隔,但其安全性能不变。2 列车之间必须时刻保持着1 个紧急制动距离,该间隔在任何情况下都保持空闲。正常运行时,后车追踪的目标点为前行列车此时若紧急制动最终的停车点,按照撞“软墙”模式进行追踪运行。正常运行为了能对前车的速度变化做出快速反应,后车最好采取自动驾驶的方式运行。如果前行列车不以大于紧急制动的减速度制动,后行列车能够不使用紧急制动而仅使用普通挡位的常用制动使列车能够安全停车。
2.2 防护曲线
当前后列车以几乎相同的速度追踪运行时,列车v2-s防护曲线见图4。

图4 准撞“软墙”模式下列车追踪的v2-s防护曲线
如图4 所示,AE为撞“硬墙”模式下的防护曲线,FH-HE为准撞“软墙”模式下的防护曲线,当列车的速度触发曲线后即以该减速度减速运行,曲线的斜率表示制动减速度的大小,减速度越大,曲线的斜率越大,越陡峭。GE为后车紧急制动防护曲线,BC为前车紧急制动防护曲线。
前车的紧急制动减速度(aE1),即只考虑正常行驶时前车的紧急制动距离,决定着前车在紧急制动下运行的最小距离,该值用来确定后车追踪目标点,即决定着后车的移动授权。
后车的紧急制动减速度(aE2),即在非正常情况下后车采取紧急制动保证后车停在追踪列车的尾部。aE2决定这2 列追踪列车之间的最小追踪距离,该间隔必须实时保持空闲,直接影响线路的运行效率。
后车的优化制动减速度(aG2),即正常行驶时后车按照撞“软墙”模式追踪运行的减速度,决定着准撞“软墙”模式防护曲线的起始制动点。aG2要综合aE1和aE2的大小和旅客舒适度评价指标[14],选择一个合适的值。如果aG2太大,G点会在F点前面,列车可能仅在GE(紧急制动)防护下运行,防护区段太短,触碰紧急制动会导致停车;如果aG2太小,A点会在F点后面,防护区段太长,运输效率不如撞“硬墙”模式。
如图4 所示,选择合适的制动挡位,保证制动点F在G点的前面,又保证制动点F在A点的后面。这样列车运行的安全性得到保障,列车的追踪间隔也优于撞“硬墙”模式。列车在优化减速度下运行,如果列车发生超速,首先会启动优化制动挡位开始制动,实时与超速防护曲线比较,如果列车的速度降低至防护曲线之下,则缓解制动,否则运行到一定的距离触发了紧急制动防护曲线,列车立刻采用紧急制动停车。
对于动车组最大常用制动能力大于紧急制动的情况,紧急制动距离大于最大常用制动距离,因此该车型在撞“硬墙”模式下的最小追踪间隔距离不是按照最大常用制动挡位计算,而是按照其他常用制动挡位计算,如果列车的最小追踪间隔距离小于紧急制动距离,就会造成紧急制动时列车不能安全停车。因此该情况下,对于以上模型的参数需要重新作出优化选择,aS2选择列车最小追踪间隔计算时的制动挡位减速度,aE保证最不利情况下安全停车,选择制动能力最强的挡位(即最大常用制动挡)。其他讨论计算与一般情况相同。
3 列车最小追踪间隔
3.1 最小追踪间隔距离
如图4所示,准撞“软墙”模式下,列车的最小追踪间隔距离(Lmin)计算如下:

式中:LBE2为后车紧急制动距离;Ls为安全保护距离;Lt为列车长度;F1B1、F1G1、G1E、EB1、FG为图 4 中对应线段的长度。
由图4可得:
式中:LBG2为后车优化制动挡制动的停车距离;LBE1为前车紧急制动距离;F1D、B1D、B1C、DC为图4中对应线段的长度。
将式(2)代入式(1),则准撞“软墙”模式下列车的最小追踪间隔距离为:

3.2 最小追踪间隔时间
如图4 所示,列车最小追踪间隔时间的计算分为2 段,在FH段采用优化制动挡位减速运行,运行至H点触发了紧急制动防护曲线,则列车在HE段采用紧急制动停车,所以列车的制动时间由2段时间组成。
式中:t为时间;v2为后车的运行速度;TBF-H为F—H的运行时间;TBF-E为F—E的运行时间;aG2为后车优化制动减速度;aE2为后车紧急制动减速度;vF、vE、vH为后车在点F、E、H处的速度值。
4 性能分析
如图4 所示,aG2选择必须合理,如果aG2太大,G点会在F点前面,列车可能仅在GE(紧急制动)防护下运行,防护区段太短,触碰紧急制动会导致不必要的紧急停车;如果aG2太小,A点会在F点后面,防护区段太长,运输效率不如撞“硬墙”模式。
4.1 G点与F点比较
设标量FG=G-F,可以通过FG的值判断列车运行情况。即:如果FG>0,则后车运行在准撞“软墙”模式下,即FH-HE防护下;如果FG≤0,则后车运行在紧急制动的防护下,即GE防护下。
由式(2)可知FG的值为:
对于高效跟驰的运行情况[15],用Matlab 仿真计算FG的大小,区分高效跟驰时列车运行的防护方式。仿真选择CRH2-300型列车的参数,计算仿真结果见图5。
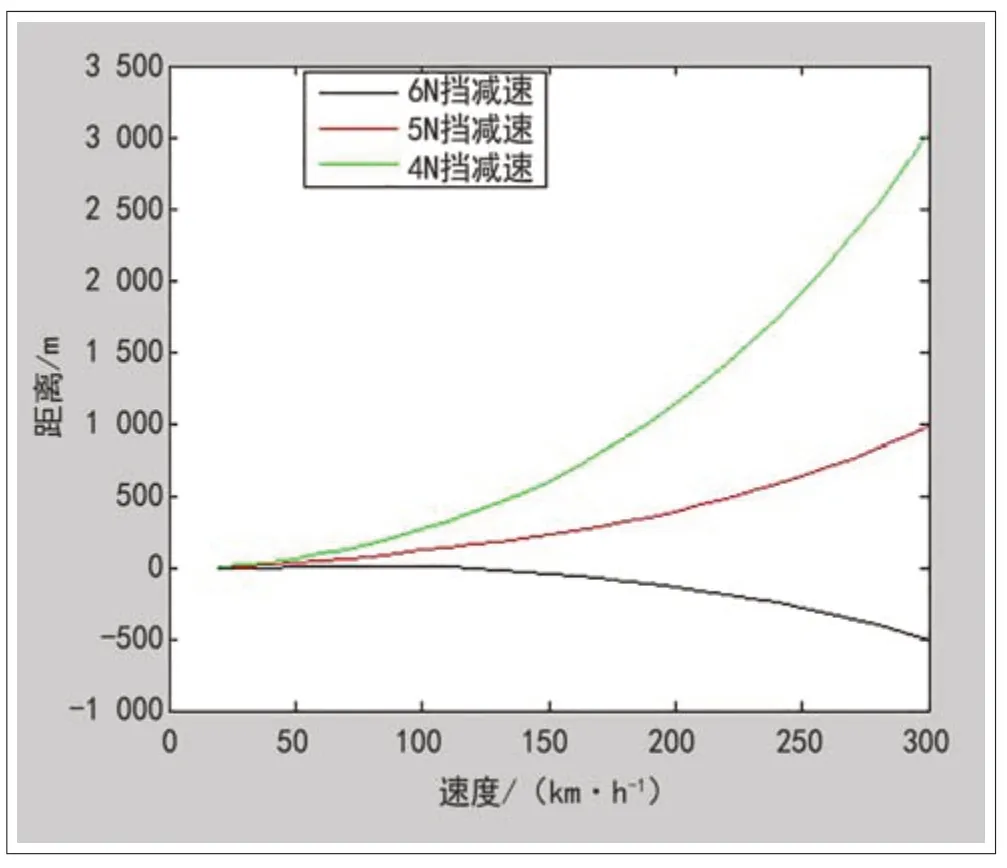
图5 高效跟驰运行时FG的值
由图5 可知,当后车的优化制动挡位取6N 挡时,曲线位于0 下面,即FG<0,说明后车运行在紧急制动的防护下,即GE防护下。当优化制动挡位取5N 挡和4N 挡时,曲线位于0 上,即FG>0,后车运行在准撞“软墙”模式的防护下,即FH-HE防护下。因此,为了使列车运行在准撞“软墙”模式下,应当选取4N 挡和5N挡作为优化制动挡位。
4.2 A点与F点比较
根据式(3)和式(4),利用MATLAB 仿真计算最小追踪间隔。最小追踪间隔距离见图6,最小追踪间隔时间见图7。当选择不同的制动挡位时,准撞“软墙”模式的列车最小追踪间隔不一样。青色曲线代表紧急制动挡位的最小追踪间隔最小,则追踪运行效率最高。当选取3N 挡为优化制动挡位时,列车的最小追踪间隔大于撞“硬墙”模式,可得3N 挡位不能选做优化制动挡位。选取4N 挡位作为优化制动挡位时,列车的最小追踪间隔距离虽然和撞“硬墙”模式几乎一样,但其最小追踪间隔时间明显小于撞“硬墙”模式,因而从时间角度分析,选取4N 挡为优化制动挡位可以缩短列车的间隔时间,提高列车追踪运行的效率。选取5N 挡位作为优化制动挡位,最小追踪间隔距离和时间均小于撞“硬墙”模式,并且随着列车速度的增大,准撞“软墙”模式能够获得的优化距离和时间也逐渐增大。
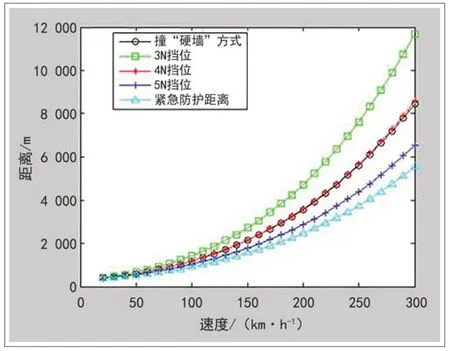
图6 最小追踪间隔距离
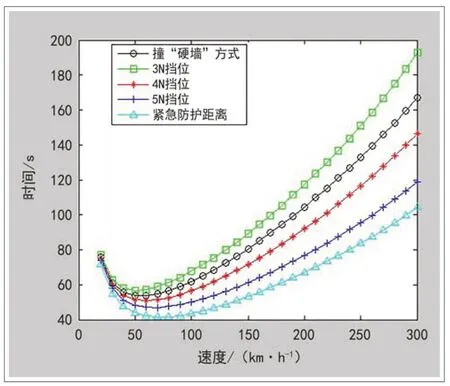
图7 最小追踪间隔时间
综上,4N和5N挡可以作为优化制动挡位,能有效地缩短列车的最小追踪间隔,提高列车的追踪效率。
5 结束语
列车防护曲线为实时计算,在运行过程中,选择合适的缓冲距离和模型参数,设计合理的自动运行控制算法,使列车触发优化制动挡位的防护曲线后,能够及时地减速至防护曲线以下,使列车一直保持运行在FH下而不会触发紧急制动防护曲线。优化制动挡位的减速度小于最大常用制动,根据旅客舒适度评价指标[14],列车的舒适性优于撞“硬墙”模式。紧急制动仅用于防止突发事故,只要前车的运行情况稳定,设计的算法合理,列车就不会触发紧急制动。由此可见,列车的稳定性和舒适性都优于撞“硬墙”模式。同时,由于列车的最小追踪间隔小,线路上列车虚拟占用的闭塞区间也缩短。如果发生突发事件导致线路上列车晚点或停车,可以利用准撞“软墙”模式快速恢复路网的正常运营。
猜你喜欢
小哥白尼(趣味科学)(2021年4期)2021-07-28
云南画报(2021年4期)2021-07-22
数学小灵通(1-2年级)(2020年11期)2020-12-28
小学生学习指导(低年级)(2019年6期)2019-07-22
小学生学习指导(低年级)(2019年3期)2019-04-22
汽车维修技师(2017年6期)2017-11-18
试题与研究·中考物理(2014年3期)2015-05-11
汽车维修与保养(2015年2期)2015-04-17
汽车维护与修理(2015年5期)2015-02-28
中国火炬(2014年11期)2014-07-25