
深水海管提管架装置研究
2020-09-23 08:44柳宇李晶曲有杰林守强李刚
机械工程师 2020年9期
柳宇, 李晶, 曲有杰, 林守强, 李刚
(深圳海油工程水下技术有限公司,广东深圳518067)
0 引 言
随着我国逐渐进入深水海底油气田开发,国内深水海底管线将逐渐增多,深水海管水下湿式应急维修潜在需求将越来越大。
目前海管水下湿式维修时需在海管与海床间制作出一合适的工作区,以便后续开展海管相关维修工作(如安装堵漏管卡或进行破损管段更换),为创造出海管水下维修合适工作区,通常采用吹坑法和提管法[1-2]等2种方法。吹坑法由潜水员或水下机器人(ROV)利用吸泥泵在海管漏点周边海床上进行局部吹坑,以便后续安装海管堵漏管卡需要。提管法是利用提管架将海管从海床上提起至一定高度,以便开展后续海管水下维修工作。在浅水区海管维修时,可用一简易H架作为提管架并在其上配备吊点和手拉葫芦,由潜水员将手拉葫芦和海管连接,通过操纵手拉葫芦将海管从海床上提起至一定高度后进行后续海管水下维修工作。但在深水海管维修中,潜水员配备简易H架无法胜任此项工作,需由水下机器人配备特殊提管架来完成全部过程[3-4]。海管维修提管架设备作为深水海管维修的关键装备,深水海管维修提管架装备的研究对保障我国深水海管安全运营起着至关重要的作用。
1 国外深水海管提管架的现状
深水海管提管架通常由底座、支腿、横梁结构、卡爪结构、防沉板等组成,根据提管架与防沉板在设计时是否相互独立安装,可将提管架分为集成式和独立式,根据提管架提升液压缸设置位置,可将提管架分为支腿提升式和横梁提升式。目前Oceaneering、Stateoil、Oil States等公司在深水海管提管架设计、制造及应用方面较有经验,其提管架产品如图1所示,表1列出了其提管架参数及形式分类。

图1 Oceaneering、Stateoil和Oil States公司提管架
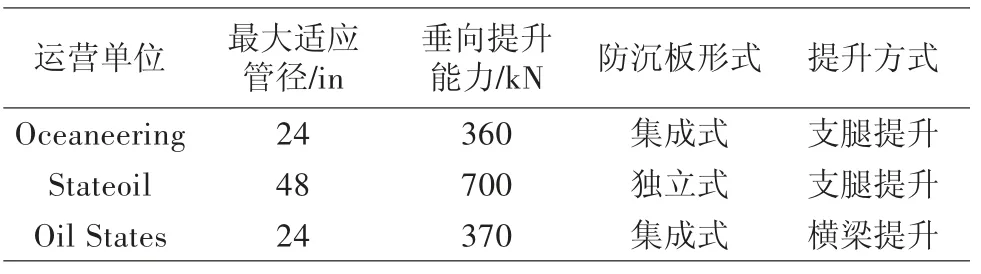
表1 海管提管架参数及形式分类
2 深水海管提管架结构组成
本文所涉及的深水海管提管架装置如图2所示,该提管架能满足最大作业水深达2000 m,适用管径6~30 in,海管垂向提升高度-1.5~2.0 m,垂向提升拉力达500 kN,可将埋设于海床面以下的海管从埋坑中提起。其采用支腿提升式设计,且设计与防沉板相互独立安装,可减轻提管架自重和底面积,有利于海上施工时提管架的收放。该提管架由支腿结构、横梁结构、ROV控制面板和卡爪结构组成。ROV控制面板为ROV阀门及液压插头的集成面板,以下重点介绍支腿结构、横梁结构和卡爪结构。
2.1 支腿结构组成
支腿结构如图3所示。
1)支腿底座。作为装置的承重结构,承载整个装置和所提海管的重力。
2)支腿。作为垂向固定结构,垂向液压缸及液压缸在其上进行固定,允许横梁结构通过滑车在支腿上移动。
3)滑车。可带动横梁结构在支腿的滑轨上进行上下移动。
4)滑靴。将滑车压紧使其紧贴在支腿的滑轨上。
5)滑轨。作为支腿的轨道,允许滑车和滑靴在其上移动。
6) 垂向液压杆。两侧固定在支腿上,允许垂向液压缸在其上移动。
7)垂向位置探测器。监控垂向液压缸在垂向位置的行走距离。
8)万向连接结。将横梁固定板、支腿垂向液压缸及支腿滑车固定在一起。
9)垂向液压缸。在左右支腿上各配备两个垂向液压缸,可在液压驱动下在支腿垂向液压杆上移动。
10)液压杆保护罩。保护液压杆上部结构。
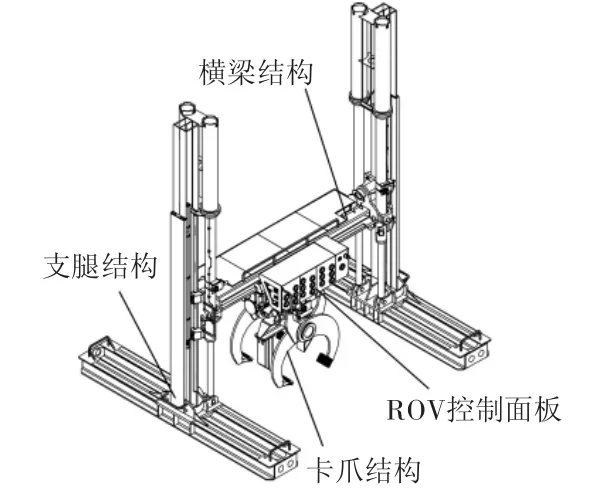
图2 海管提管架主要结构
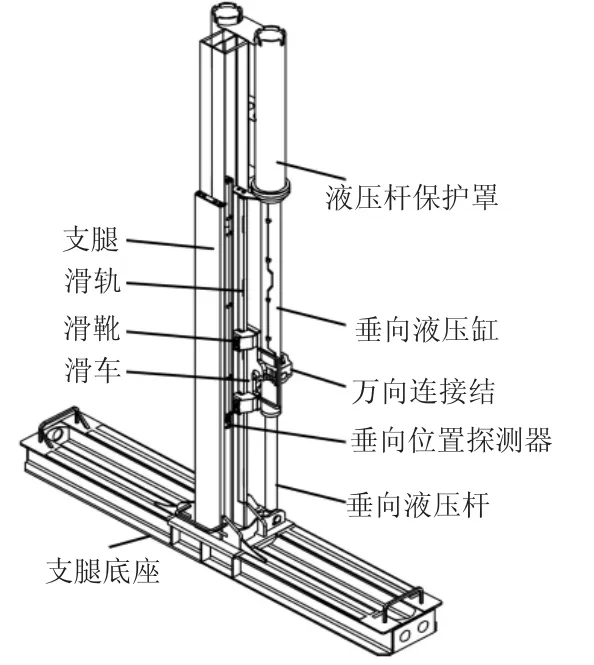
图3 海管提管架支腿结构组成
2.2 横梁结构
横梁结构如图4所示。
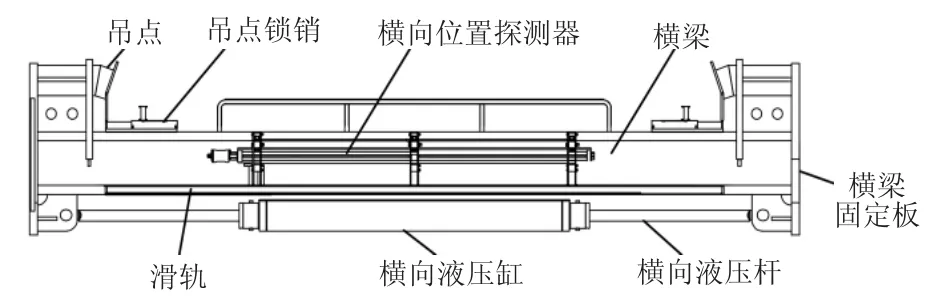
图4 海管提管架横梁结构组成
1)横梁。作为横梁结构的支撑结构,承载卡爪结构和所提海管的重力。
2)滑轨。作为横梁的轨道,允许卡爪机构的滑车和滑靴在其上移动。
3)横梁固定板。与支腿结构的万向连接结,将横梁结构固定在支腿垂向液压缸上。
4)横向液压杆。两侧固定在横梁上,允许横向液压缸在其上移动。
5)横向液压缸。可通过提供液压,使其在横梁横向液压杆上移动。
6)吊点。作为整个装置的吊索具吊点。
7)吊点锁销。可由ROV操作进行开合,以便将吊索具在吊点上锁住/释放。
8)横向位置探测器。监控横向液压缸在横向位置的行走距离。
2.3 卡爪结构
卡爪结构如图5所示。
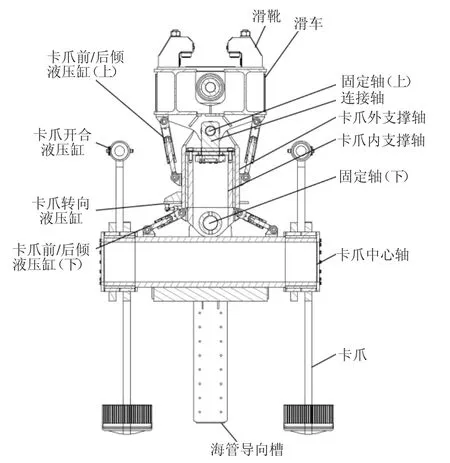
图5 海管提管架卡爪结构组成
1)卡爪。通过卡爪开合液压缸可进行开合,从而将海管抱紧/释放。
2)卡爪中心轴。作为卡爪和海管导向槽的支撑结构,允许卡爪绕其进行开合。
3)固定轴(上/下)。允许卡爪中心轴在卡爪前/后倾液压缸(上/下)带动下,绕其进行转动。
4)卡爪内支撑轴。可绕固定轴(下)做一定程度的摆动,同时也可绕连接轴做一定程度的转动。
5)卡爪外支撑轴。可绕固定轴(上)做一定程度的摆动。
6)连接轴。可绕固定轴(上)做一定程度的摆动。
7)滑车。固定在横向液压缸,可带动卡爪结构在横梁的滑轨上进行左右移动。
8)滑靴。可将滑车压紧使其紧贴在横梁的滑轨上。
9)卡爪前/后倾液压缸(上/下)。可在液压驱动下,调整卡爪与海管间的相对倾角。
10)卡爪开合液压缸。可在液压驱动下,带动卡爪做开合运动,进而达到将海管抱紧/释放的目的。
11)卡爪转向液压缸。可在液压驱动下,调整卡爪与海管轴向相对角度。
12)海管导向槽。可引导海管进入卡爪。
3 深水海管提管架液压控制系统分析
根据上节深水海管提管架结构组成分析可知,提管架在进行提管操作时卡爪会涉及以下4种运动:垂向上下移动,横向左右移动,绕海管转动,沿海管前/后倾运动。因此在进行提管架液压系统设计时,需实现上述4种功能。图6为提管架的液压控制系统设计,其中包括以下3种模式:正常工作模式,备用工作模式和应急回收模式。
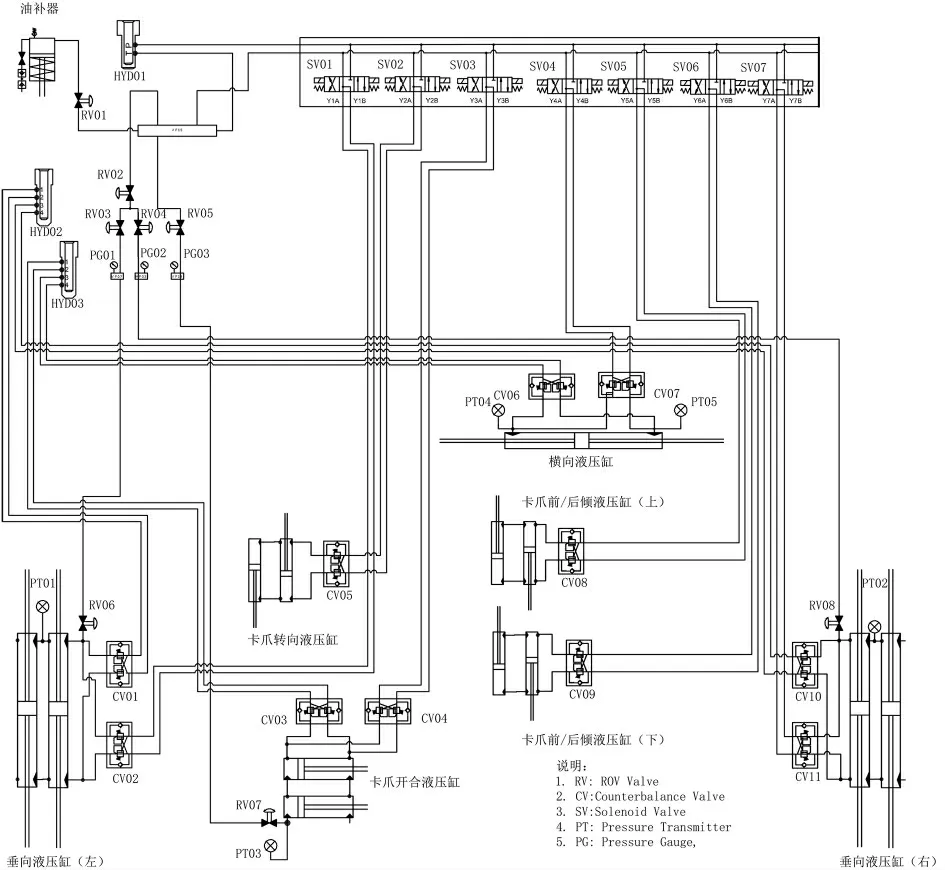
图6 海管提管架液压控制系统
3.1 正常工作模式
此模式为首选工作模式,启用此模式时需关闭液压系统上其他ROV阀门RV01~RV08,ROV将液压接头插入PLF上液压接口HYD01(两孔),通过电磁阀(solenoid valve, SV)SV01-07,分别控制垂向液压缸(左)、卡爪转向液压缸、卡爪开合液压缸、横向液压缸、卡爪前/后倾液压缸(上)、卡爪前/后倾液压缸(下)、垂向液压缸(右),并通过压力传感器(pressure transmitter, PT)PT01-05分别对垂向液压缸(左)、垂向液压缸(右)、卡爪开合液压缸、横向液压缸(左)、横向液压缸(右)内的压力进行监控,来完成相关作业。
3.2 备用工作模式
此模式为提管架正常工作模式失效(如SV01-07电磁阀失效)后的选择,该模式只能控制垂向液压缸(左)、垂向液压缸(右)、卡爪开合液压缸、横向液压缸,但在大多数情况下,通过对上述4个液压缸控制就能确保提管架在水下完成相关作业。启用此模式时,首选需退出正常工作模式,ROV将两孔液压接头从液压接口HYD01上拔下,在HYD02和HYD03液压接口上分别插入四孔液压接头来启动备用工作模式。
3.3 应急回收模式
此模式为正常工作模式和备用工作模式均失效的情况下应急释放海管进行提管架回收时使用,此情况下需首先将海管下放至海床,然后打开卡爪,过程涉及到垂向液压缸(左)、垂向液压缸(右)和卡爪开合液压缸。通过操作RV01、RV02、RV03、RV04、RV06、RV08阀门开合,平衡上述液压缸内外压力,将海管从提管架卡爪中释放。
4 深水海管提管架工作流程
4.1 准备阶段
在下放深水海管维修提管架装置至海管就位之前,启动横梁的横向液压缸,将卡爪位置调至横梁中心位置;启动支腿的垂向液压缸,将横梁调至支腿最顶端位置;启动卡爪开合液压缸,将卡爪完全打开;启动卡爪转向液压缸,将卡爪旋转至卡爪轴线与横梁成垂直位置;启动卡爪前/后倾液压缸(上)和卡爪前/后倾液压缸(下),使卡爪相对支腿底座无任何前/后倾;吊机将吊索具分别装在横梁的吊点上。此时提管架的初始状态设置完毕。
4.2 实施阶段
下放提管架至海底,ROV协助提管架在海管上进行就位;待提管架就位成功后,ROV协助吊机拆除提管架吊索具;启动横梁的横向液压缸,将卡爪位置移至海管正上方;启动卡爪转向液压缸,将卡爪旋转至卡爪轴线与海管轴线成同一朝向;启动卡爪前/后倾液压缸(上)和卡爪前/后倾液压缸(下),使卡爪相对海管无倾角;启动支腿的垂向液压缸,将卡爪下放直至海管进入海管导向槽,且海管能够被卡爪完全包裹;启动卡爪开合液压缸,将海管抱入卡爪中;确认抱管成功后,启动支腿的垂向液压缸,将横梁、卡爪和海管一起从海床上提起,直至提起高度达到海管维修设计高度。
4.3 回收阶段
待海管完成维修后,启动支腿的垂向液压缸,将横梁、卡爪和海管一起缓慢下放至海床上;启动卡爪开合液压缸,将卡爪完全打开;确认海管于海床上就位后,重复准备阶段步骤,将提管架恢复成初始状态位置,之后下放吊机回收提管架。
5 结 语
本文对深水海管提管架装置的结构组成、液压控制系统及工作流程进行分析,得出以下结论:1)提管架支腿结构、横梁结构和卡爪结构作为提管架核心功能结构,在设计时需重点考虑。2)提管架液压系统设计,除考虑正常的工作模式外,还需兼顾备用工作模式和应急回收模式。3)提管架在进行工作时,需将卡爪的横向、竖向、轴向及前后倾4个方位与海管方位调整成一致后,才能进行抱管和提管作业。
提管架是深水海管应急维修系统的主要设备,可用于深水海管、基盘、管汇、管线终端回接或维修,目前我国在深水海管提管架研究仍为空白,因此研究提管架对我国深水油气管道安全保障具有重要意义。
猜你喜欢
机械工程师(2022年10期)2022-11-17
汽车实用技术(2022年19期)2022-10-19
化工机械(2022年4期)2022-09-02
现代制造技术与装备(2022年1期)2022-02-21
汽车工艺师(2021年8期)2021-08-28
内江科技(2021年3期)2021-04-04
机械工程师(2020年12期)2020-12-23
机械制造与自动化(2020年3期)2020-07-16
中国科技纵横(2020年5期)2020-06-29
中国修船(2019年3期)2019-06-13
