高分辨小卫星飞轮微振动橡胶隔振器的设计
2020-10-21 07:52陈善搏
机械设计与制造 2020年10期
杨 睿,王 栋,谷 松,陈善搏
(1.中国科学院大学长春光学精密仪器与物理研究所,吉林 长春 130033;2.中国科学院大学,北京100039;3.长光卫星技术有限公司,吉林 长春 130033)
1 引言
一体化结构设计使小卫星结构变得更加紧凑,大幅度减小卫星发射体积及质量,进而降低了商用高分辨光学小卫星的发射成本,但一体化结构设计使得飞轮的安装位置更靠近光学相机,使得飞轮扰振的衰减路径变短,影响相机内部光学元件的稳定性,最终导致光学相机的成像质量变差,如何隔离飞轮不平衡扰振已经成为高分辨光学小卫星研制过程中急需的问题[1-6]。目前国内外学者主要采用主动隔振技术来隔离飞轮不平衡扰振,例如,Worldview-II 在CMG 支架与服务舱主承力梁之间安装了全向隔振器;ChandraX-ray 观测器为每个飞轮安装Stewart 隔振平台[7-9]。由于主动隔振对安装空间要求较高,并且对卫星原有结构改动较大,破坏小卫星原有结构设计及结构的紧凑性,增加了卫星在发射段结构被破坏的风险,因此,主动隔振装置难以安装在小卫星内来隔离飞轮扰振。
将设计被动隔振器,通过控制振动能量输出的方法对飞轮进行隔振。由于橡胶隔振器具有结构紧凑、工艺性好、成本低、对原有结构改动小、体积小、重量轻等优点,可以根据隔振要求及安装空间设计刚度、阻尼和外形尺寸[10],非常适合作为小卫星内隔离飞轮扰振的隔振器。通过隔振效果的分析,验证隔振器的隔振效果,满足隔振要求,表明隔振器设计合理。
2 振源测量
高分辨小卫星采用板式一体化结构设计,主要结构包括:X向安装板、Y 向安装板、Z 向安装板、底板、对接环、相机安装板、相机等。飞轮分别安装在X 向安装板、Y 向安装板、Z 向安装板,如图1 所示。光学相机采用同轴反射式光学系统,内部光学器件主要由次镜、主镜及支撑结构等组成,相机内部结构,如图2 所示。其中,次镜采用碳纤维梁支撑,主镜直接安装在钛合金相机主背板上,碳纤维支撑梁结构使次镜系统结构强度及刚度都较主镜弱,当飞轮扰动能量传递到光学系统时,会使次镜结构发生抖动,进而使相机光轴发生偏转,最终导致相机成像变得模糊,此外,飞轮产生的中高频扰振对成像的影响很难用图像处理技术消除,所以设计隔振器隔离飞轮产生的微振动显得尤为重要[11],因此将设计橡胶隔振器来隔离飞轮扰振,隔振器设计流程,如图3 所示。
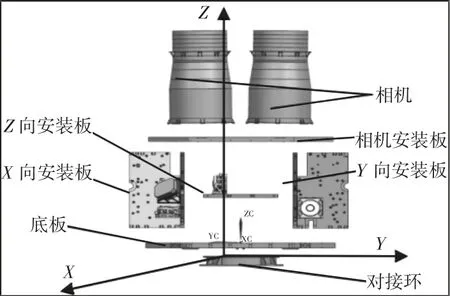
图1 卫星结构及飞轮安装位置Fig.1 Satellite Structure and Flywheel Installation Position
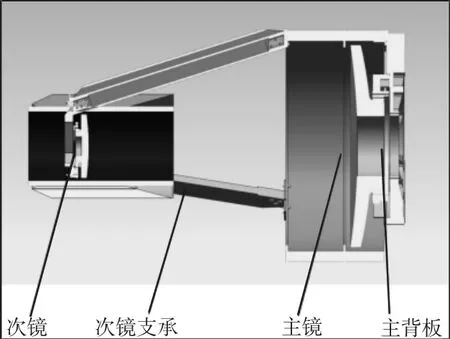
图2 相机光学系统结构Fig.2 Camera Optical System Structure
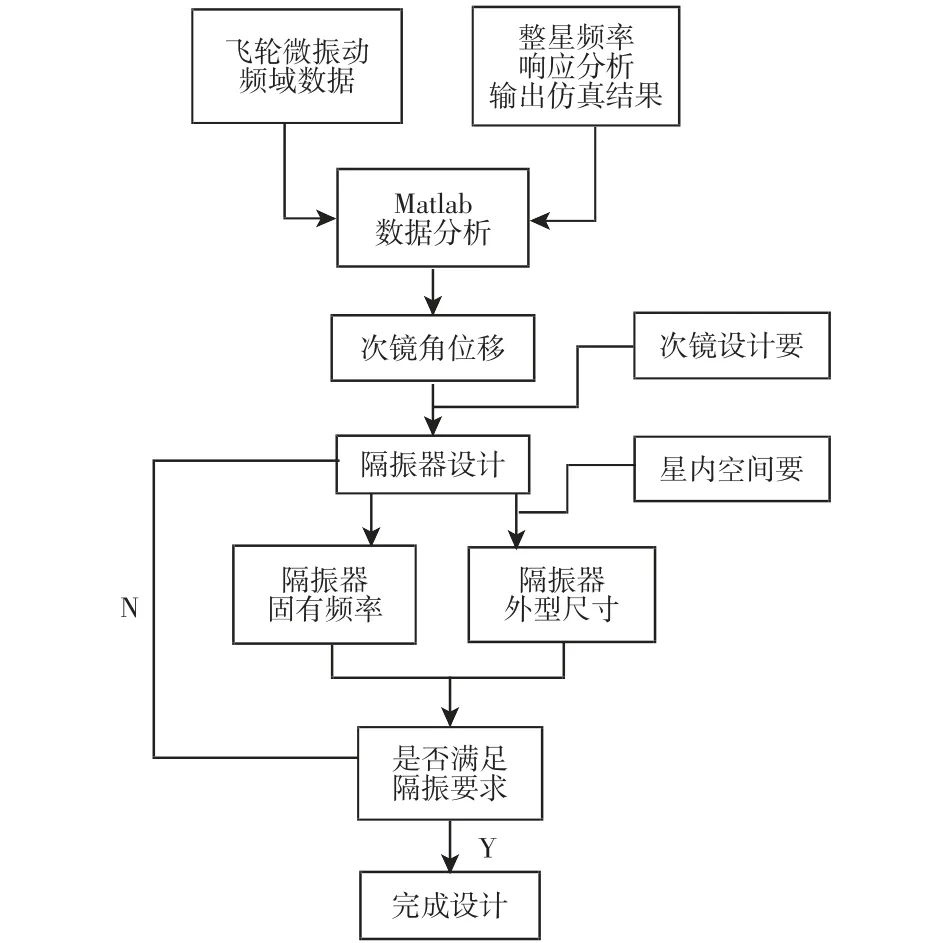
图3 飞轮隔振器设计流程Fig.3 Design Circuit of Flywheel Isolator
为模拟星上飞轮工作状态,地面测量时,飞轮转速范围为(200~3000)r/min,每隔200r/min 采样一次飞轮扰振数据,采样时长为60s,测量装置图,如图4 所示。测量装置包括:HR-FP600-600 测力平台、飞轮、支架,其中Z0、X0/Y0分别指向飞轮的轴向及径向。支架X0/Y0、Z0向基频分别为385Hz、720Hz,为避免飞轮扰振频率与支架固有频率发生耦合,而放大飞轮微振动,使数据分析引入较大误差,因此在测量时采用低通滤波,截止频率为300Hz,得到飞轮扰振的时域曲线图,如图5 所示。
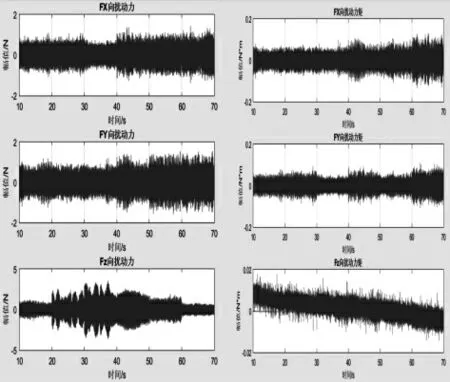
图5 飞轮扰振时域曲线Fig.5 Flywheel Micro-Vibration Time-Domain Curve
利用傅立叶变换对时域数据进行频谱特征分析,得到飞轮扰振力及力矩的瀑布图,如图6 所示。图中(0~50)Hz 、(200~300)Hz 内分别存在飞轮转频峰及共振峰,转频峰产生原因是飞轮存在径向不平衡,其峰值特性随转速的增大而增大;共振峰产生原因是振动频率与飞轮本体结构发生了耦合,放大了飞轮的振动[12],其峰值特性不随转速的增大而变化,飞轮X0、Y0、Z0向瀑布图中共振峰频率点及峰值,如表1 所示。表中:--—量级较小。
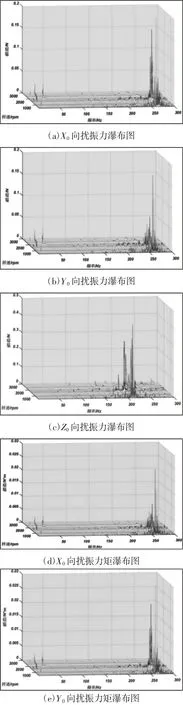
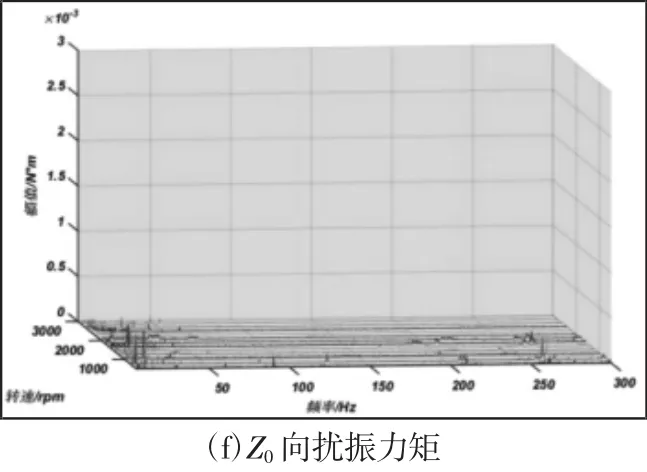
图6 飞轮扰振瀑布图Fig.6 Fly-Wheel Disturbance Waterfall
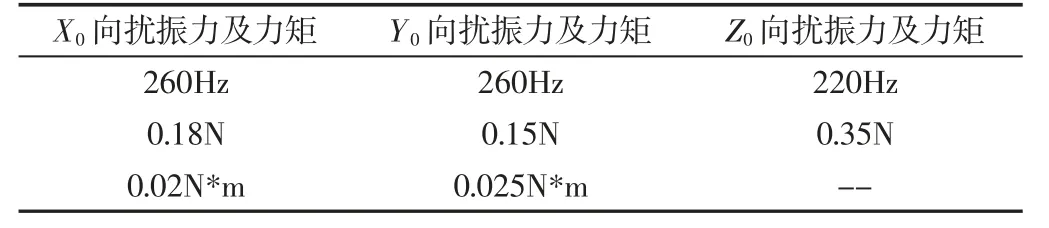
表1 共振峰频率点及峰值Tab.1 Resonant Peak Frequency Point and Peak
3 仿真分析
分析飞轮扰振对次镜结构稳定性影响时,不能将光学相机视为刚体,需要充分考虑相机次镜结构与飞轮扰振频率发生耦合的情况[13-14],因此,需要建立卫星结构及相机有限元模型,模型中采用质量点模拟星内单机及MPC 模拟星上结构连接状态,有限元分析时采用无固定约束边界条件模拟卫星在太空中的自由状态,并分别在飞轮实际安装位置施加X、Y、Z 向单位力,卫星有限元模型,如图7 所示。利用Patran&Natran 软件对整星进行频率响应分析,输出次镜角位移仿真结果,得到次镜在单位力激励下的合成角位移响应,如图8 所示。
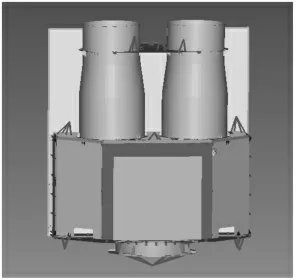
图7 卫星有限元模型Fig.7 Finite Element Model of the Satellite
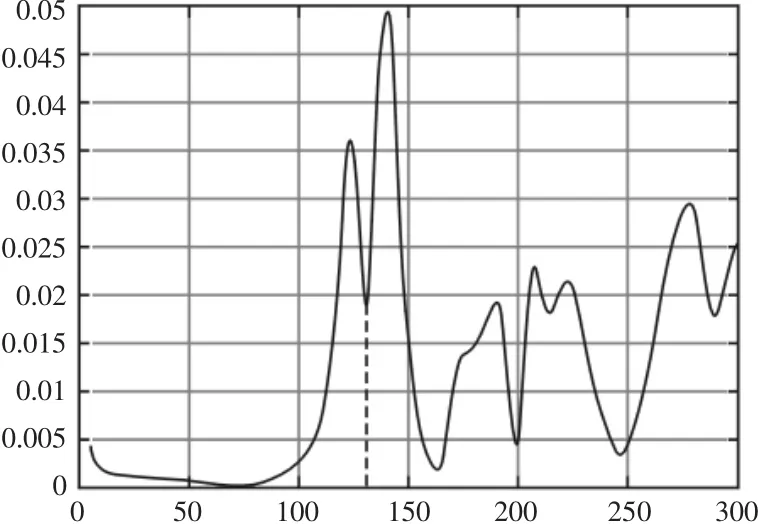
图8 次镜角位移响应曲线Fig.8 Displacement Response of the Secondary Mirror
利用Matlab 集成分析飞轮扰振频域数据与卫星次镜频率响应分析结果,得到次镜在飞轮扰振作用下的三向角位移曲线,如图9 所示。由图6、图8、图9 可知次镜系统固有频率与飞轮扰振的共振峰发生了耦合,放大了次镜角位移,其中三向最大角位移响应,如表2 所示。为了保证高分辨小卫星的成像质量,要求次镜三向最大角位移幅值小于0.01″,因此需要设计橡胶隔振器来隔离飞轮产生的共振峰,为避免隔振器与扰振频率发生耦合而放大次镜角位移,隔振器的固有频率应选在次镜响应曲线波谷处,综合考虑卫星发射段隔振器的可靠性和隔振效果,所以将橡胶隔振器的固有频率选为135Hz。
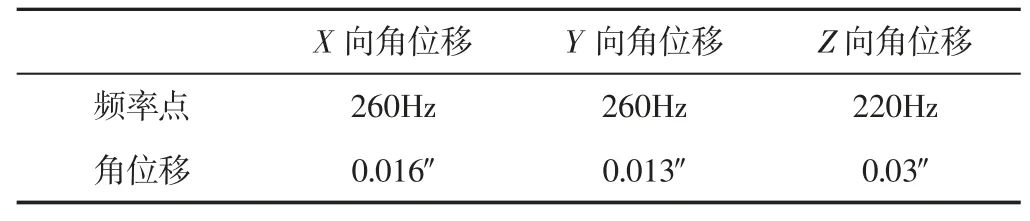
表2 次镜最大角位移Tab.2 The Maximum Angular Displacement Response of the Secondary Mirror
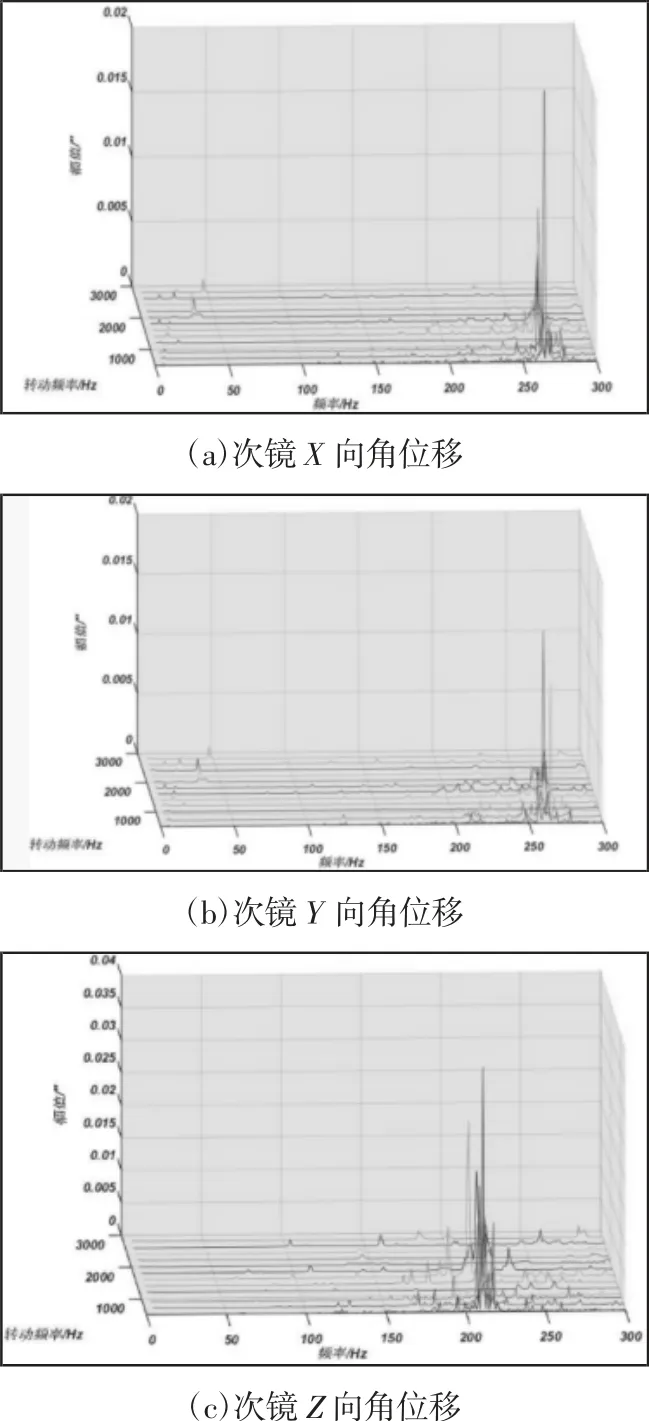
图9 次镜角位移曲线Fig.9 The Angular Displacement of the Secondary Mirror
4 隔振器设计
4.1 橡胶隔振器设计
由节3 中分析得到橡胶隔振器的固有频率为135Hz,根据隔振原理可知,其有效隔振频率段为190Hz 以上。为保证飞轮的安装精度及旋转精度,将设计平头圆筒式橡胶隔振器[15],并采用四组隔振器对飞轮进行隔振。根据小卫星内安装空间要求,橡胶隔振器的外形尺寸选为:l=15mm、R=10mm、r=5mm,外型尺寸,如图10 所示。由式(1)得单组橡胶隔振器的Z0向刚度kzs=36450N/m。所以取整后kzs=36000 N/m,由式(2)~式(4)解得E=820N/cm2。
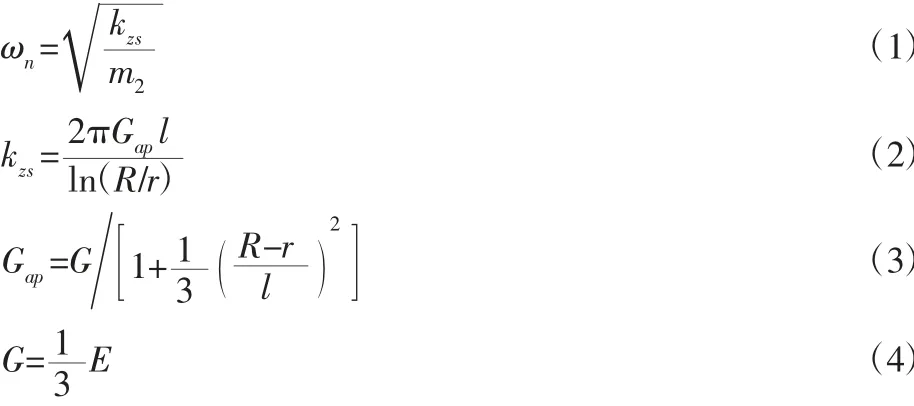
式中:m2=m1/4(m1为飞轮质量/ 8kg);Gap—考虑形状和尺寸影响时的切变模量;G—切变模量;E—弹性模量;l—隔振器的轴向长度;R、r—隔振器的外径和内径。
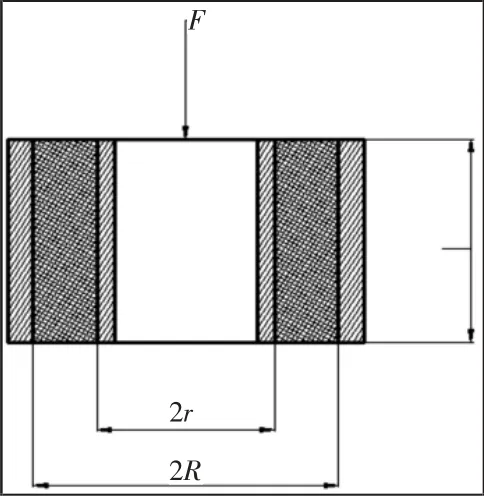
图10 圆柱型橡胶隔振器Fig.10 Cylindrical Rubber Isolator
由式(5)~式(7)计算其X0/Y0向刚度为krs=19396N/m,则X0/Y0向固有频率为98Hz,有效隔振频率段为138Hz 以上。

式中:μF—尺寸影响系数;Eap—考虑形状和尺寸影响时的弹性模量。
4. 2 隔振效果
测量采取橡胶隔振措施后飞轮产生的扰振,测量条件与节2中相同,橡胶隔振器安装位置,如图11 所示。隔振前后飞轮扰振时域对比,如图12 所示。图中数据表明,隔振后扰振幅值明显降低。通过傅立叶变换得到隔振后飞轮扰振力及力矩瀑布图,如图13 所示。图中共振峰频率点及峰值,如表3 所示。新共振峰产生的原因为飞轮扰振频率与橡胶隔振器固频率发生耦合。由表3、图13 分析可知,隔振器Z0向固有频率与设计值基本吻合,而X0/Y0向固有频率比设计值高7Hz 左右,相对误差小于10%,因此满足隔振器固有频率的设计要求。对比表1、表3 中数据,飞轮X0、Y0、Z0向共振峰值明显降低,对共振峰的隔振效率达60%以上。利用有限元及Matlab 分析采取橡胶隔振措施后次镜角位移,分析条件与节3 相同,得到隔振后次镜三向角位移响应,如图14 所示。图中次镜角位移在105Hz、135Hz 附近略有放大,但放大后次镜在X、Y、Z 向最大角位移均小于0.01″,隔振后次镜三向最大角位移,如表4 所示。由表中数据可知,隔振后次镜最大角位移幅值满足小卫星的设计要求,证明橡胶隔振器隔振效果明显、设计合理。

表3 共振峰频率点及峰值Tab.3 Resonant Peak Frequency Point and Peak

表4 次镜最大角位移Tab.4 The Maximum Angular Displacement Response of the Secondary Mirror
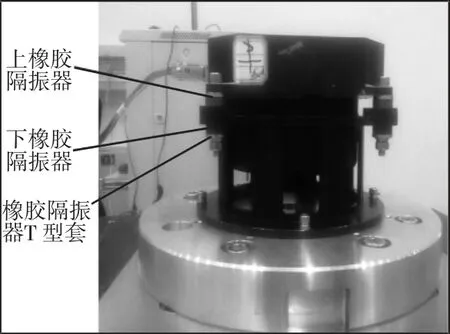
图11 橡胶隔振器安装位置Fig.11 Installation Position of Rubber Vibration Isolator
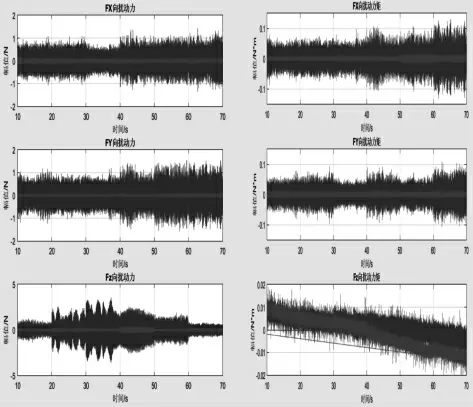
图12 隔振前后飞轮扰振时域曲线对比Fig.12 Compare the Disturbance Time Domain Curve of Flywheel Before and After Vibration Isolation
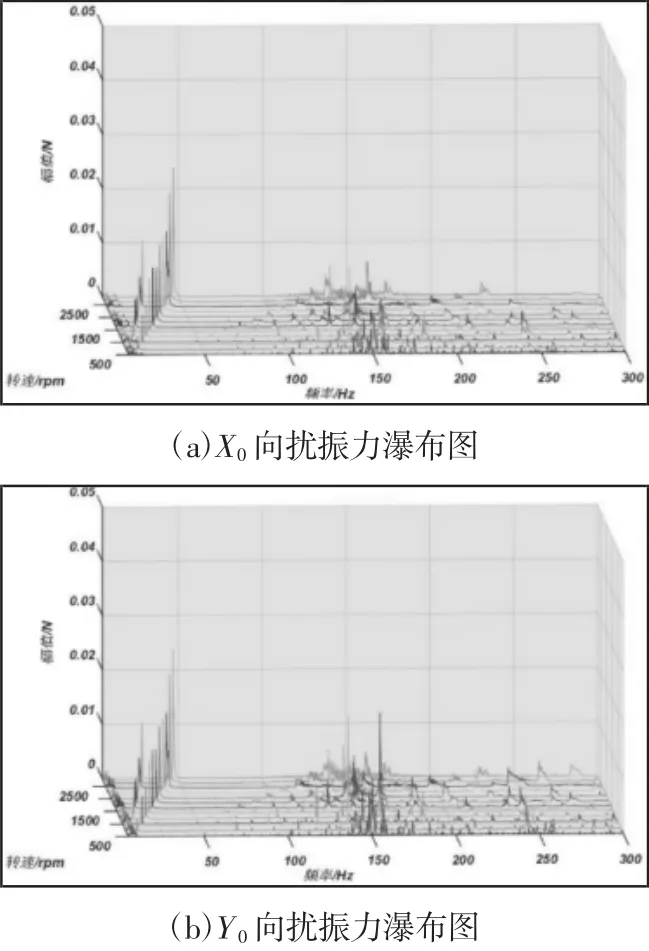
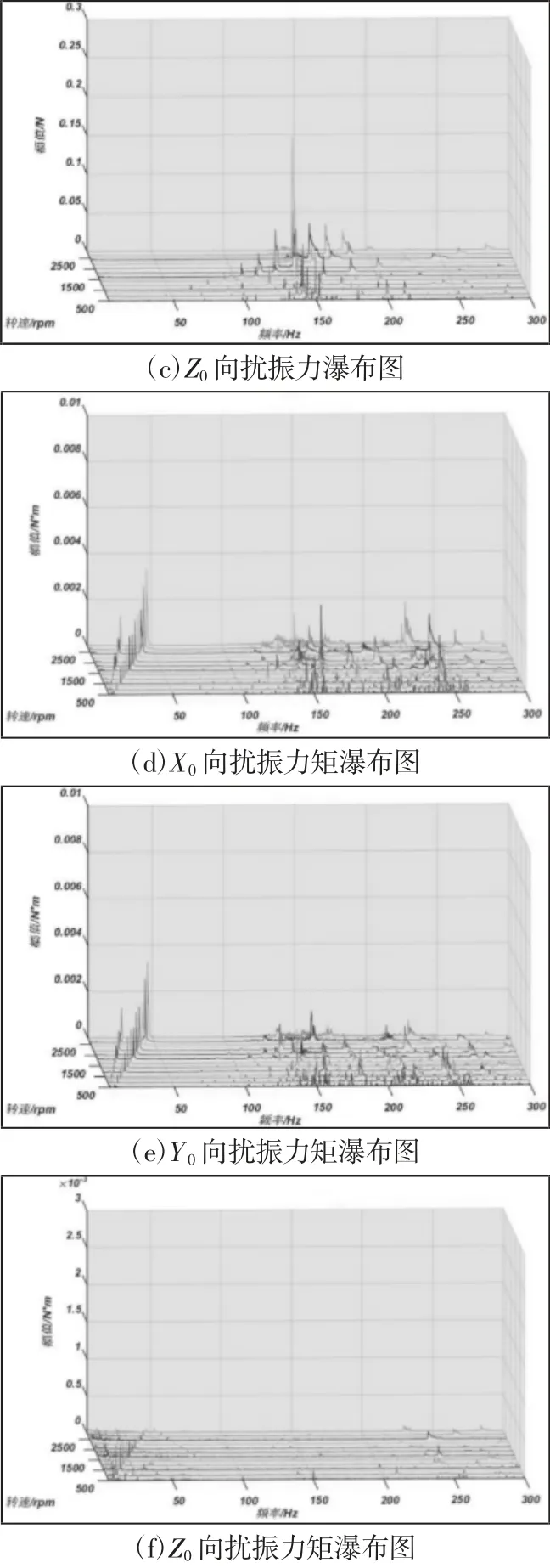
图13 飞轮扰振瀑布图Fig.13 Fly-Wheel Disturbance Waterfall
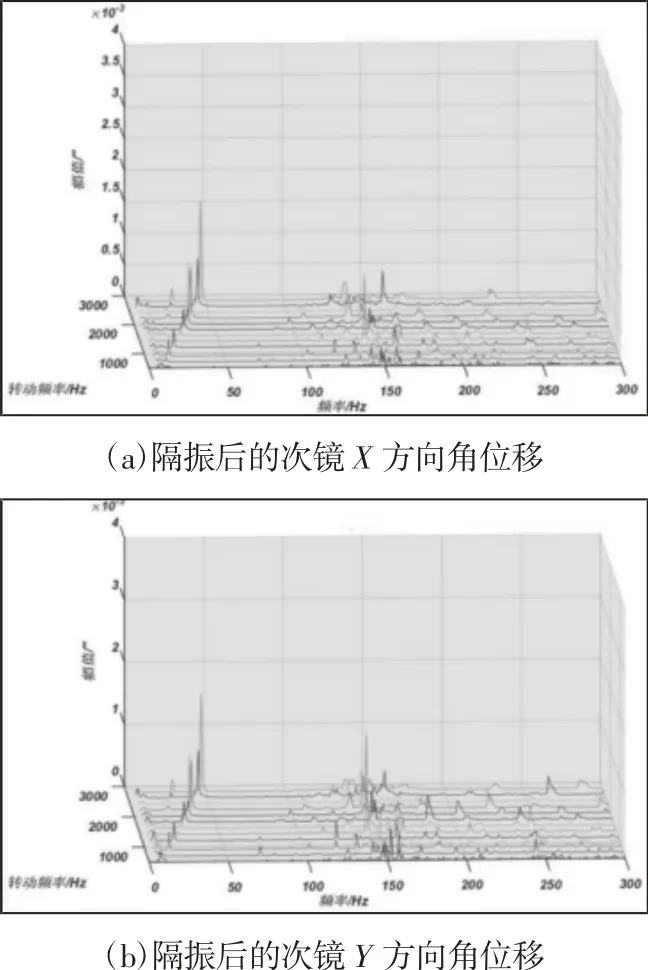
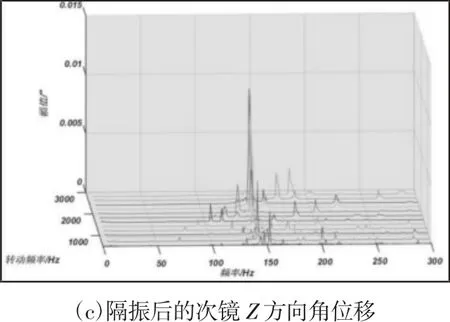
图14 隔振后次镜角位移Fig.14 The Angular Displacement of the Secondary Mirror After Vibration Isolation
5 总结
利用被动隔振技术,通过控制振动能量输出的方法来隔离飞轮扰振,系统的分析了飞轮扰振对相机次镜角位移的影响,参照次镜角位移的设计要求及星内安装空间要求,设计了橡胶隔振器,其中隔振器径向、轴向固有频率分别为105Hz、135Hz。对比隔振前后飞轮扰振的共振峰峰值,隔振后峰值明显减小,对共振峰的隔振效率达60%以上。利用有限元分析和Matlab 分析,无隔振措施时,次镜三向最大角位移分别为0.016″、0.013″、0.03″,而采取隔振措施后,次镜三向最大角位移分别为0.0015″、0.0015″、0.008″,隔振后次镜最大角位移小于0.01″的设计要求,验证了橡胶隔振器隔振效果明显,满足隔振要求,表明橡胶隔振器设计合理。
猜你喜欢
机电信息(2021年17期)2021-07-01
装备制造技术(2020年4期)2020-12-25
内燃机与配件(2020年22期)2020-09-10
模具制造(2019年7期)2019-09-25
表面工程与再制造(2019年3期)2019-09-18
知识经济·中国直销(2018年12期)2018-12-29
课程教育研究·学法教法研究(2018年14期)2018-08-11
当代陕西(2018年12期)2018-08-04
中国自行车(2017年11期)2017-04-04
光学仪器(2016年5期)2017-01-12