机械手执行器的计算机控制系统建模与仿真
2021-01-05 07:06张继红
四川职业技术学院学报 2020年6期
张继红
(四川职业技术学院 机械工程系,四川 遂宁 629000)
0 引言
机械手要顺利完成工作,需要机器人控制系统完成对机械手臂的各关节及末端执行器电机的力、加速度、位姿等的控制[1]。计算机控制的位置伺服系统在工作中发挥了很大的作用。设计了一种机械手末端执行器的计算机控制的位置伺服系统,由计算机控制系统的采样系统理论,设计时对数字控制系统分析计算。建立了该系统的动态数学模型,运用计算机仿真程序进行仿真并优化设计系统结构和主要技术参数。
1 末端执行器的计算机控制系统组成
末端执行器的计算机控制系统采用工业控制计算机[2],由于计算机输出的是数字信号,需要经D/A 转换送给伺服功率放大器,再驱动直流电动机通过摩擦传动带动执行器动端移动,转轴上安装光电编码器,能把编码器的角度信号送入计算机完成位置反馈。
2 机械手的末端执行器结构设计
末端执行器的结构[3],如图1 所示。该结构是一个控制电机驱动的摩擦传动链。设计的技术参数分别为:抓取物品直径小于0.2 米,其重量在2.0 公斤一下,动态性能是超调量小于15%,静态精度0.15 毫米夹钳式机械手末端执行器结构。具体方案为伺服电动机驱动摩擦轮,在摩擦力作用下带动夹钳移动端作直线运动,在夹持时起到一定的保护作用。
3 末端执行器的计算机控制系统建模
连续控制系统通常用微分方程及S 域传递函数两种数学模型来表达,用相应古典控制理论分析计算。而离散控制系统或计算机数字控制系统可用差分方程,Z 域脉冲传递函数描述,并分析和设计。
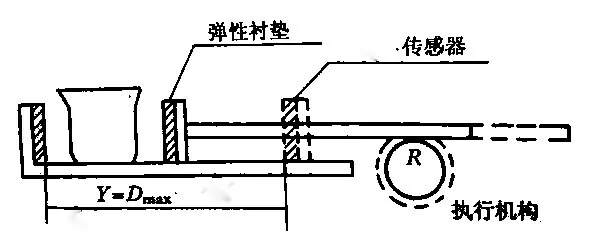
图1 末端执行器结构
即是连续控制系统通常将时域的微分方程经过L 变换为S 域的代数方程求解,用龙格库塔算法进行数字计算;那么离散控制系统是将时域的差分方程经过Z 变换为Z 域的代数方程计算。
3.1 计算机控制系统的脉冲传递函数
如图2 所示的数字控制系统的脉冲传递函数[4]定义:在线性离散系统中并且是零初始条件,那么输出脉冲序列的Z 变换与输入脉冲序列的Z变换之比。表示为:
由于脉冲传递函数的推导要用到脉冲响应函数,线性定常连续系统有:
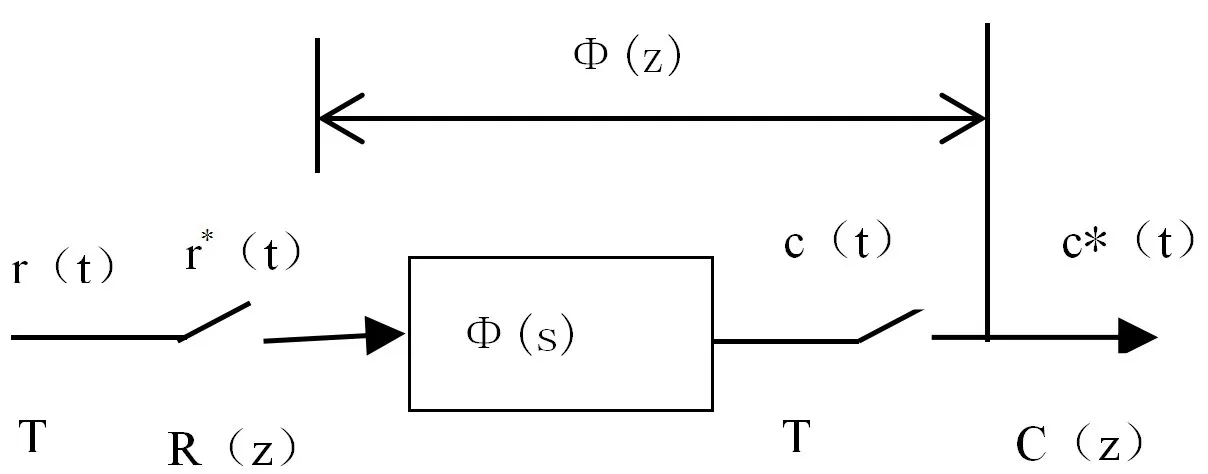
图2 脉冲传递函数框图
令R(s)=1,则采样系统的脉冲响应函数为:

图3 是一个采样开关在误差通道的离散系统。
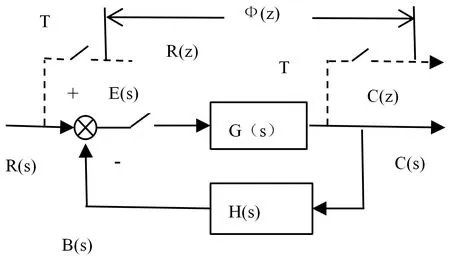
图3 采样开关在误差通道的离散系
经推导其数字控制系统的脉冲传递函数为:

3.2 机械手伺服控制系统数学模型
夹钳末端执行器通常采用直流电机伺服控制系统完成活动钳口的运动,原理如图4 所示。
该机电系统的动力学模型可以根据机械网络的达朗贝尔平衡原理,空间连续律以及电气网络的基尔霍夫电压定律,电流定律建立:
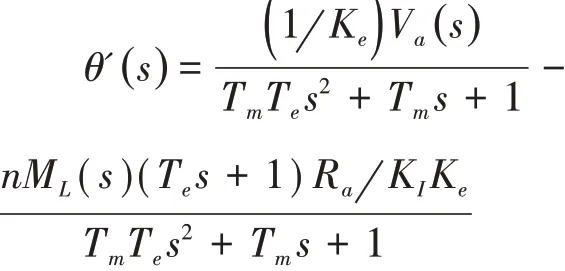
式中:Ke为反电动势常量,n 为传动比,Tm为机电时间常量,Te为电枢回路常量。其余物理量见图。
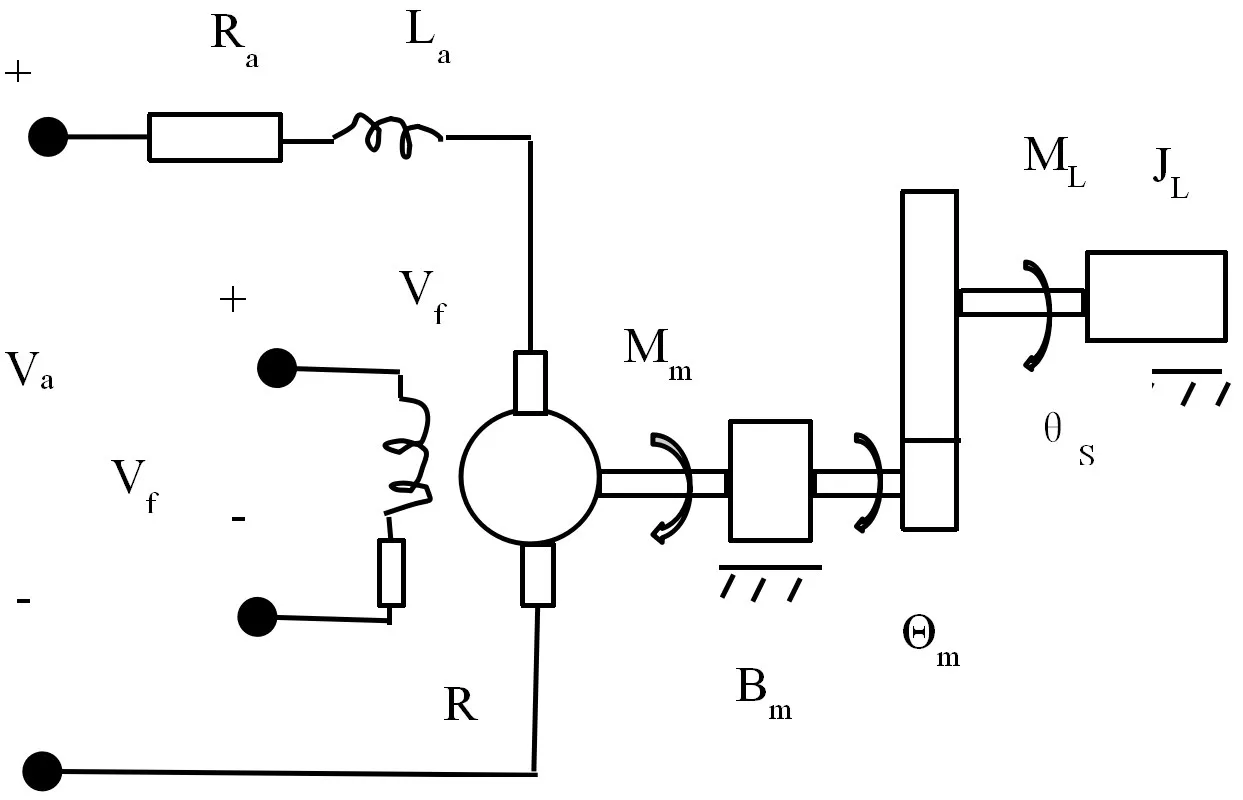
图4 伺服控制系统
3.3 机械手计算机控制系统的数学模型
夹钳式末端执行器工作时要对动钳口的加速,减速,移动的位移及夹紧力等进行控制。系统框图如图5 所示:D(z)为数字机,即数字滤波器,对控制系统动态系统进行校正,使计算机控制系统满足动态性能指标要求,又叫数字控制器,是系统的核心。数控机床中采用的控制器为数字PID 控制器,或者P,I,D 它们之间的不同组合来完成控制。D∕A 数模转换器一般用零阶保持器ZOH 来完成计算恢复信号的状态。
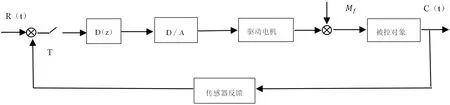
图5 计算机控制系统
零阶保持器的传递函数是:
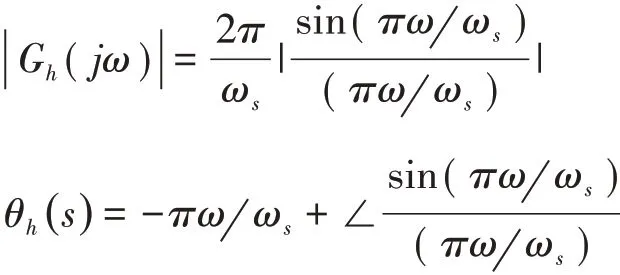
它的频率特性为:
T 理想采样开关,满足香农定理。
一个理想的带零阶保持器ZOH 的单位负反馈计算机控制系统如图6 所示:
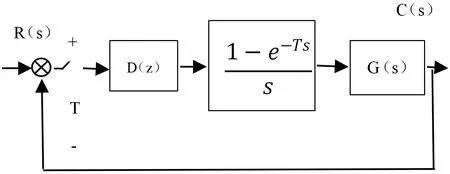
图6 单位负反馈计算机控制系
机械手末端控制器的计算机控制系统根据设计的总体结构以及各元器件相应参数,得出采样控制系统的框图如图7 所示。
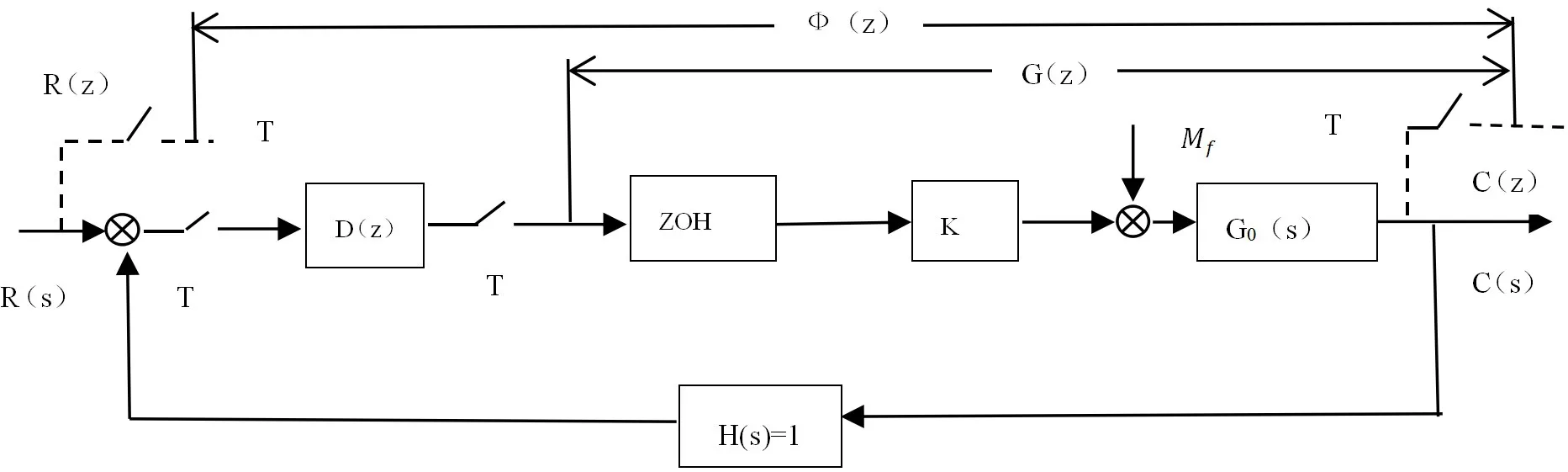
图7 末端控制器采样系统框图
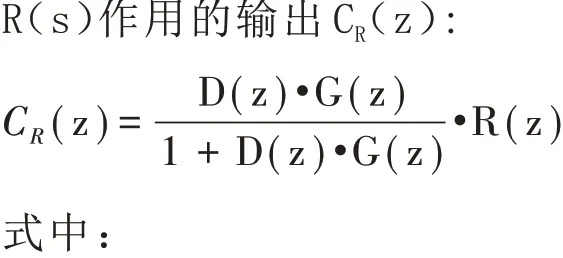
由闭环采样系统的脉冲传递函数法则可以推导在干扰作用下末端控制器的计算机控制系统脉冲输出函数C(z)。
根据线性系统的叠加原理,可以分别求出输入R(s)作用产生的输出CR(z)和扰动N(s)作用产生的输出CN(z)。
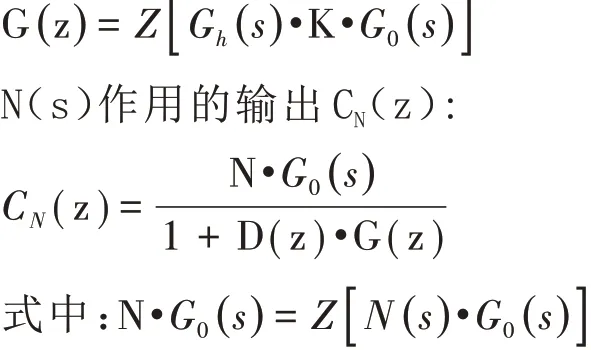
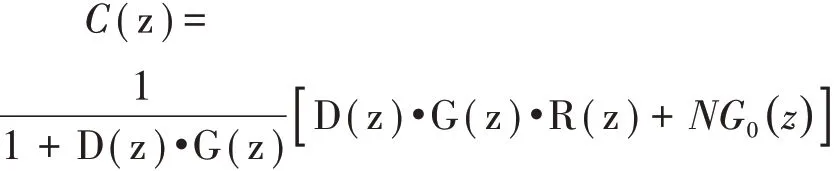
叠加得系统总输出C(z)的数学模型:
该计算机控制系统模型中D(z)为数字PID 控制器[5],G(z)包含有零阶保持器ZOH 和机电控制系统传递函数G0(s) ,以及比例系数K。
4 机械手计算机控制系统仿真
运用计算机控制系统的仿真程序SIMU 对机械手末端控制系统进行仿真[6]。该程序能对两种结构的计算机控制系统进行仿真。其中D(z)是数字控制器,G(s)是连续控制对象,G(z)是离散控制对象。系统输入可以为阶跃函数,斜坡函数或者抛物线函数。对于阶跃输入可以算出动态指标:超调量,上升时间及调节时间。按照程序的屏幕提示选择和输入有关数据,可打印仿真的结果数据和图形。该系统有:

采样周期T=0.05 秒。仿真结果输出如图8。
5 结论
计算机在工业控制中的应用越来越广,文章对末端控制器的计算机控制系统进行建模,利用SIMU 程序进行仿真。得到控制器D(Z)和计算机控制系统在输入R(S)下的时间响应。仿真的结果表明选择系统的参数匹配[7],满足设计动态特性要求。
猜你喜欢
农业工程学报(2022年13期)2022-10-09
灌溉排水学报(2022年6期)2022-07-13
锻压装备与制造技术(2022年1期)2022-03-24
水泥工程(2020年4期)2020-12-18
装备制造技术(2020年2期)2020-12-14
制造技术与机床(2019年8期)2019-09-03
中国特种设备安全(2019年2期)2019-04-22
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2017年9期)2017-11-27
自动化学报(2016年8期)2016-04-16