
基于FAL函数滤波的动力定位自抗扰控制器设计
2021-01-06 08:57郭亮琨杨宣访王家林
计算技术与自动化 2021年4期
郭亮琨 杨宣访 王家林
摘 要:针对动力定位系统数学模型不够精确,而且具有很强的非线性特性问题,采用自抗扰控制算法设计其控制器。该控制算法无需精确的数学模型,主要利用扩张状态观测器估计船舶运动位置、速度和总扰动,最后通过反馈控制对其进行补偿,从而实现船舶动力定位的精确控制。但实际工程中,船舶的测量系统的测量噪声是难以避免的,为了避免测量噪声的影响,针对所设计的扩张状态观测器采用FAL函数滤波器,在测量信号进入扩张状态观测器之前进行滤波,以减小测量噪声的影响。从而使得其反馈控制更加精确。最后以一艘供给船为例进行仿真分析,验证了所设计非线性控制器的有效性和鲁棒性。
关键词:船舶动力定位;自抗扰控制器;FAL函数滤波
中图分类号:TP273 文献标识码:A
动力定位(Dynamic Positioning,DP)是指船舶不借助锚泊,而是通过自身安装的推进器来抵抗风、浪、流等环境干扰的影响,实现其在海面上固定位置或预期航迹的保持[1]。动力定位系统主要由测量系统、控制系统、推进器系统三部分组成,其中控制系统是整个系统的核心部分。第一代动力定位系统采用“低通/陷波滤波算法+PID控制[2]”,因为快速性和超调难以协调等不足逐渐被取代。第二代采用“Kalman滤波器+最优控制”,但此控制算法依赖于数学模型的精度,且缺乏鲁棒性[3]。近年来出现的第三代动力定位系统采用了“非线性状态估计+智能控制”,主要体现在鲁棒控制、模糊控制、神经网络控制等控制方法。因为智能控制算法不够成熟,适应参数变化能力有限,还只是动力定位控制系统研制的一种趋势。所以动力定位的控制方法一直是当前的研究热点。
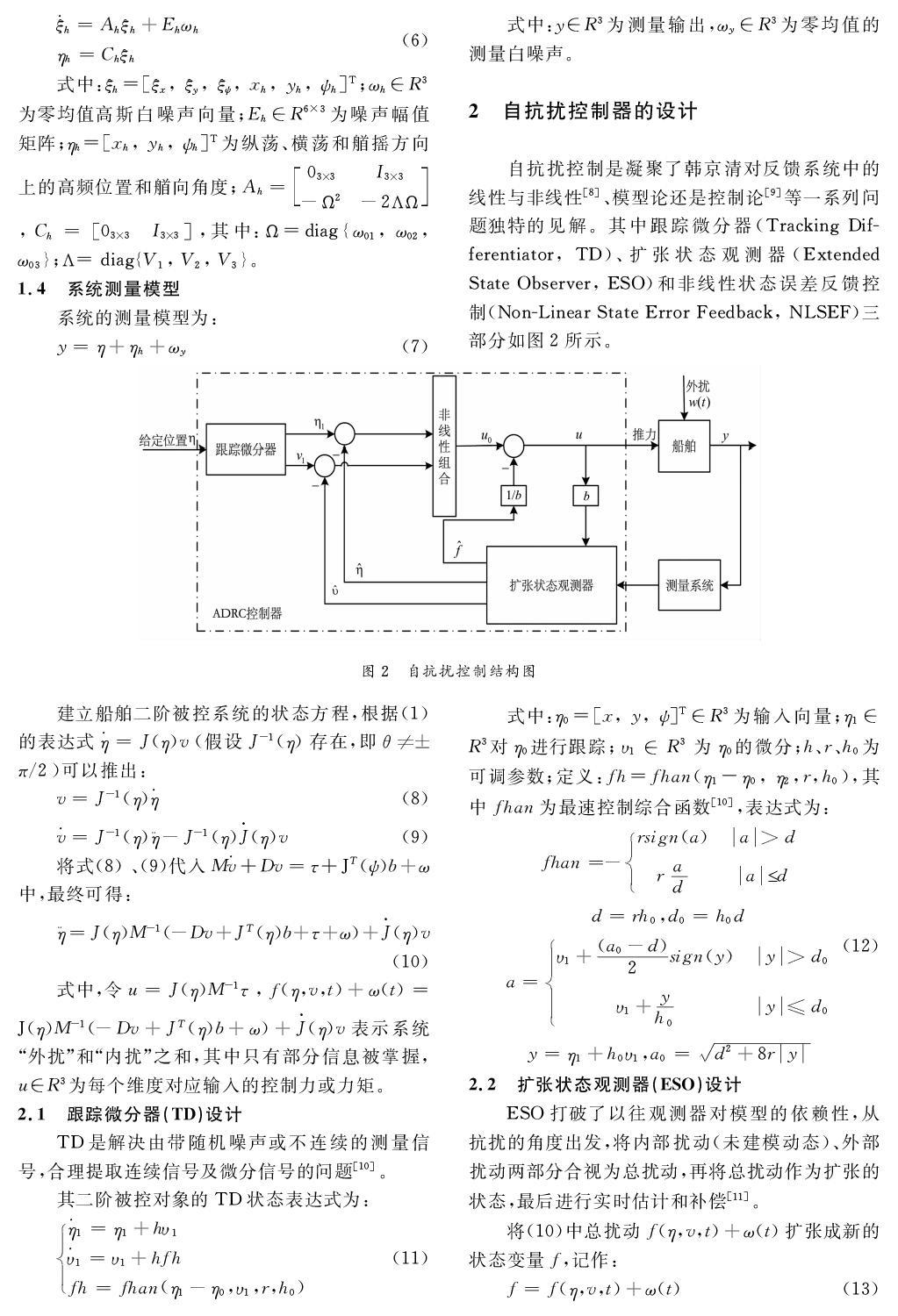
1998年韩京清教授吸收现代控制理论成果,在PID控制基础上提出了一种新的控制策略-自抗扰控制器[4](Active Disturbance Rejection Controller, ADRC),它由跟踪微分器、扩张状态观测器和非线性状态误差反馈控制三部分组成。ADRC的抗干扰能力较强,并且无需精确的数学模型,相较于PID控制、最优控制更适合于具有高度耦合的复杂非线性动力定位系统,相较于智能控制更利于工程实现,其优势相当明显。ADRC目前在很多领域中,已得到关注与认可。文献[5]针对深空探测器的自主姿态稳定问题提出自抗扰控制律,通过扩张状态观测器实时估计总扰动并结合角速度偏差,反馈实现控制目的,仿真结果验证了该控制律的有效性和鲁棒性。文献[6]将自抗扰控制应用于的矩阵变换器的闭环系统中解决输出电压易受影响问题,提出双环自抗扰控制策略,与基于PI控制相比,具有更优的动静态性能。
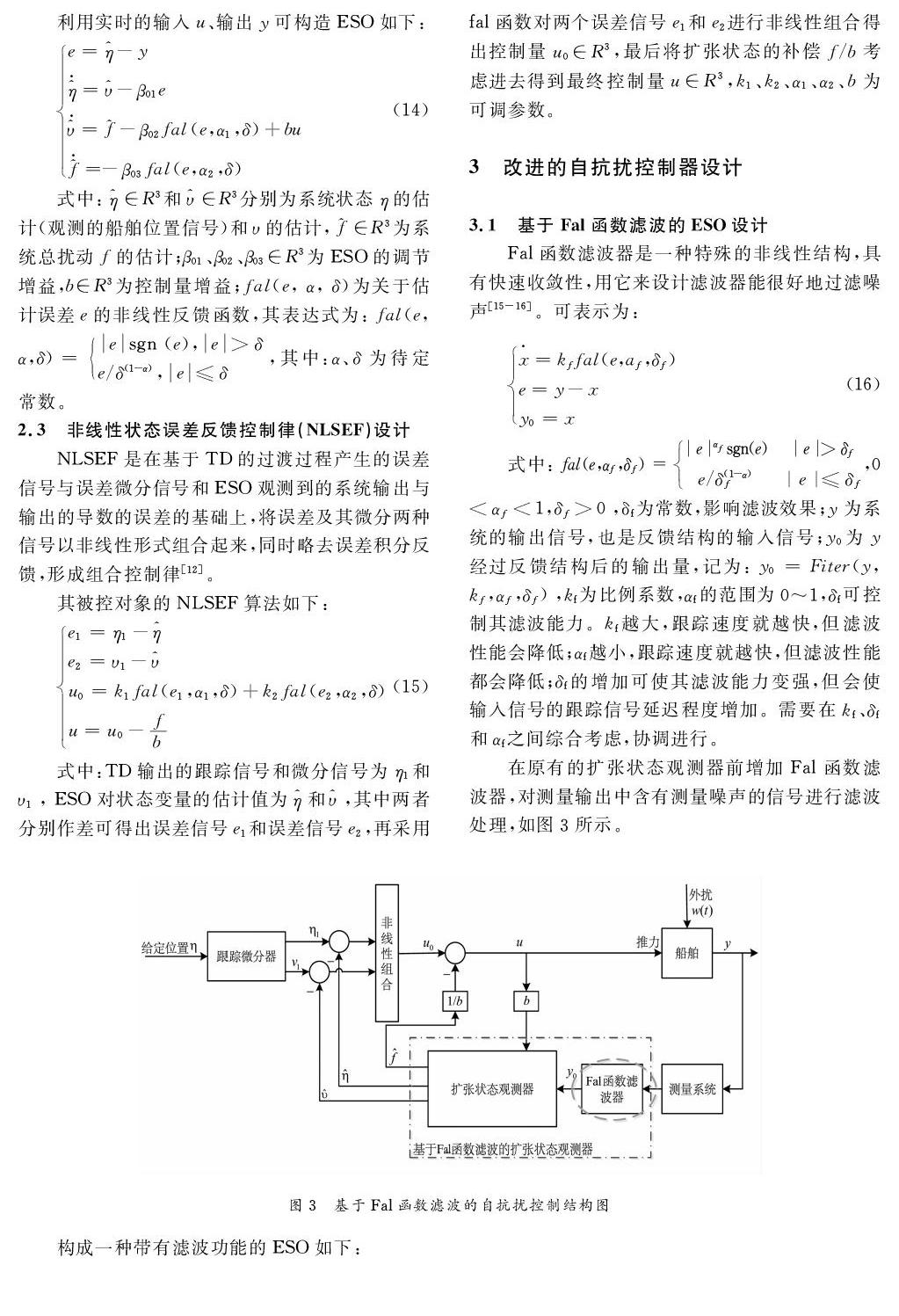
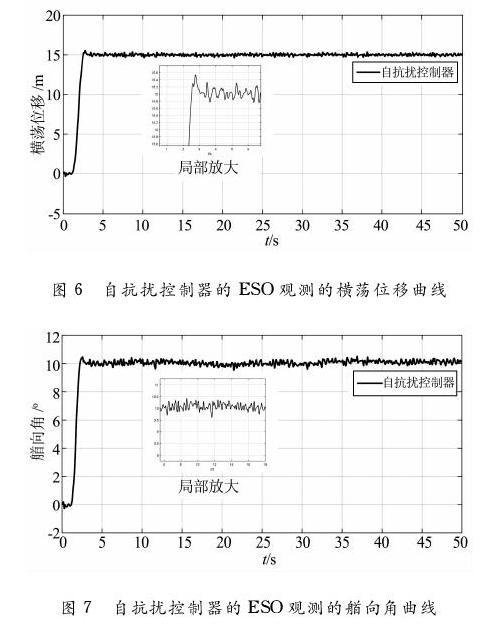
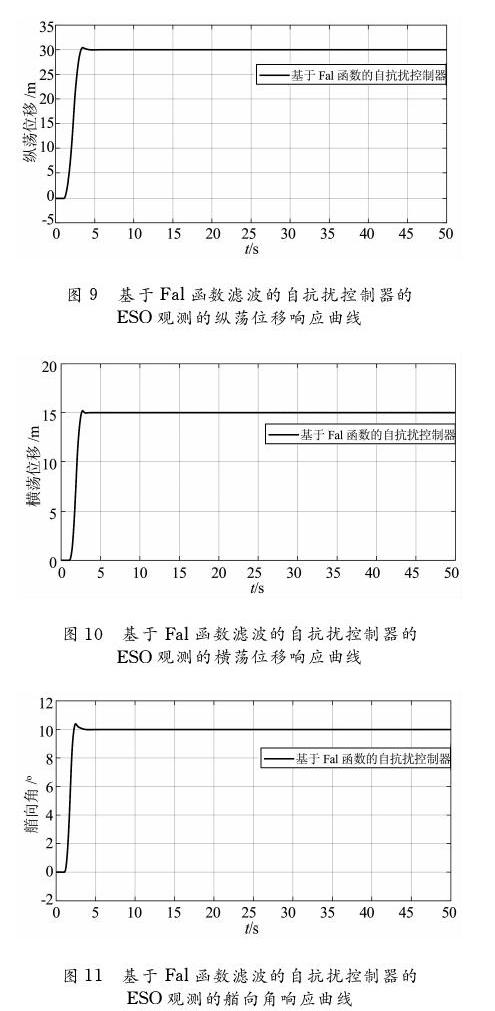
在动力定位领域中,文献[7]提出基于自抗扰控制的船舶动力定位控制策略,采用三阶扩张状态观测器估计船舶位置、速度和总扰动,利用非线性反馈对误差和扰动进行补偿,仿真结果证明,该控制器不但可以有效地抑制海洋环境对动力定位船舶的扰动,并且对模型参数变化具有较强的鲁棒性和适应性。但实际工程中,动力定位中的传感器测量系统只能提供带有测量噪声船舶位置和姿态信息,若尝试直接对其控制反而会影响扩张状态观测器的估计,从而对自抗扰控制产生影响,是需要滤去的。鉴于此,采用一种基于Fal函数滤波的自抗扰控制器,考虑引入一个濾波器预先进行滤波处理,进一步使得其反馈控制更加精确,达到精度更高的控制效果。最后通过仿真验证其控制器的有效性和鲁棒性。
1 船舶动力定位系统的数学模型
1.1 低频运动模型
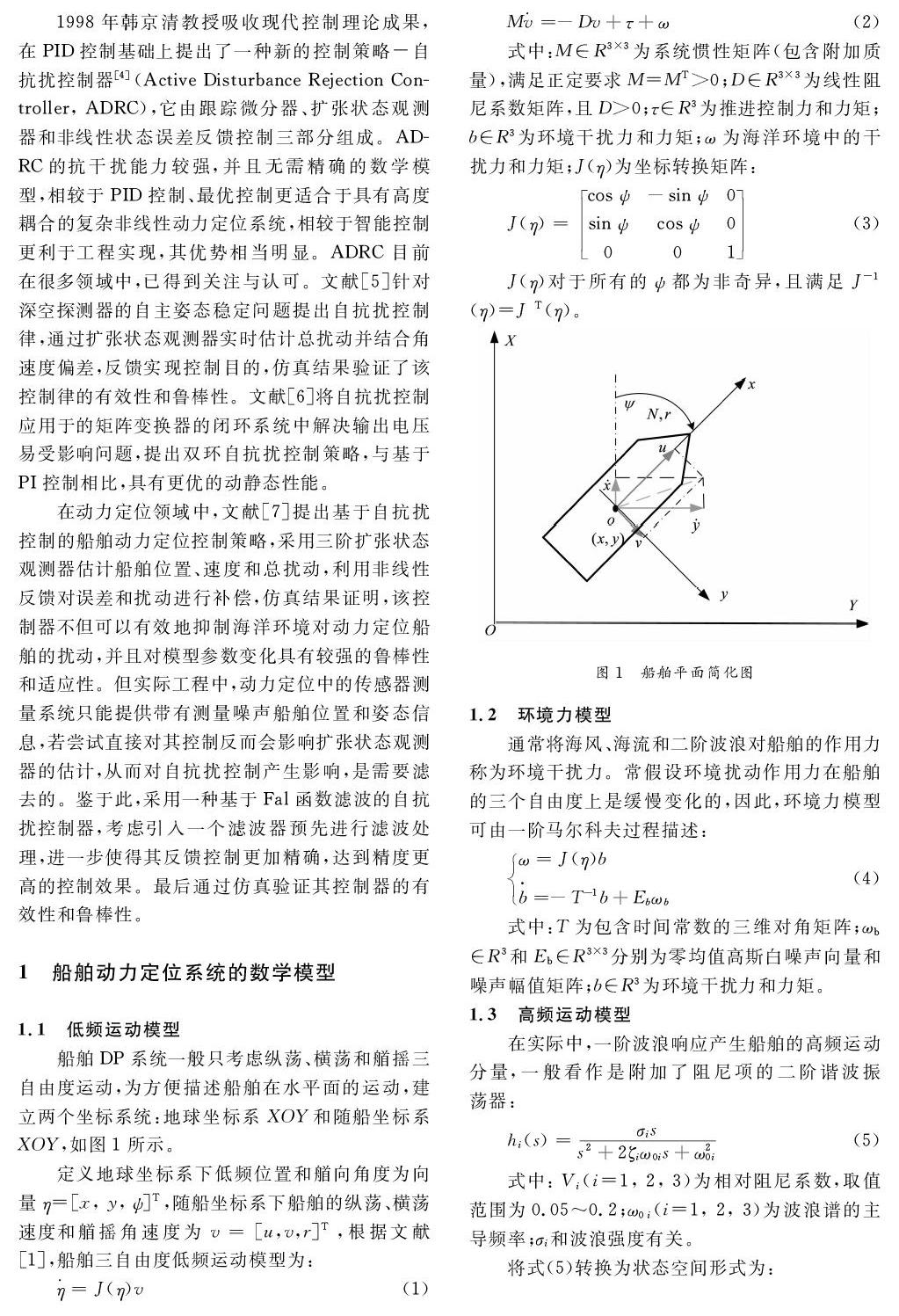
船舶DP系统一般只考虑纵荡、横荡和艏摇三自由度运动,为方便描述船舶在水平面的运动,建立两个坐标系统:地球坐标系XOY和随船坐标系XOY,如图1所示。
5 结 论
针对DP系统的非线性控制器设计问题,采用一种基于Fal函数滤波的自抗扰控制器。通过加入Fal函数滤波器,减少了测量噪声对船舶控制的影响,主要解决了实际DP系统中含有测量噪声的问题,进一步提高控制器的动态性能。最后通过仿真实验对比,结果表明该控制器可以有效地避免了测量噪声的干扰,从而提高控制精度。
参考文献
[1] 边信黔,付明玉,王元慧. 船舶动力定位[M].北京:科学出版社, 2011.
[2] MORGAN J M. Dynamic positioning of offshore vessels[M]. Petroleum, Tulsa,1978.
[3] BALCHEN J G, JENSSEN N A, SAELID S. Dynamic positioning using Kalman filtering and optimal control theory//Proceedings of IFAC/IFIP Symposium on Automation in Offshore Oil Field Operation, 1976: 183- 186.
[4] HAN Jingqing. Autodisturbance rejection controller and it's applications[J]. Control and Decision, 1998, 13(1): 19-23.
[5] 钟声,黄一, 胡锦昌. 深空探测航天器姿态的自抗扰控制[J].控制理论与应用. 2019,36 (12):1-7.
[6] 胡风革,吴旭升,聂子玲.矩阵变换器自抗扰控制策略研究[J].海军工程大学学报.2015,27(3):14-18.
[7] 赵大威,边信黔,丁福光. 非线性船舶动力定位控制器设计[J]. 哈尔滨工程大学学报.2011,32 (1):57-61.
[8] 韩京清.反馈系统中的线性与非线性[J].控制与决策,1988, 3(2):27-32.
[9] 韩京清.控制理论-模型论还是控制论[J].系统科学与数学,1989,9(4): 328-335.
[10]HAN Jingqing, WANG Wei.Nonlinear trackingdifferentiator[J].Journal of Systems Science and MathematicalSciences, 1994,14(3):177-183.
[11]王海强,黄海.扩张状态观测器的性能与应用[J].控制与决策,2013, 28(7):1078-1082.
[12]HAN Jingqing. Nonlinear state error feedback control law NLSEF[J]. Control and Decision, 1995, 10(3): 221-226.
[13]FOSSEN T I,STRAND J P. Passive nonlinear observer design for ships using Lyapunov methods: fullscale experiments with a supply vessel[J]. Automatica,1999,35(1):3-16.
[14]林飞,孙湖,郑琼林,等.用于带有量测噪声系统的新型扩张状态观测器[J].控制理论与应用.2005, 22(6): 995-998.
[15]刘聪.自抗扰控制在DP船控制中的应用研究[D].哈尔滨工程大学硕士学位论文,2018.
[16]王宇航,姚郁,马克茂.FAL函数滤波器的分析及应用[J]. 电机与控制学报,2010,14(11):88-92.
