
论PID与自耦PID控制理论方法
2021-01-08 06:19曾喆昭陈泽宇
控制理论与应用 2020年12期
曾喆昭,陈泽宇
(长沙理工大学电气与信息工程学院,湖南长沙 410114)
1 引言
比例-积分-微分(proportional-integral-differential,PID)控制的精髓就是根据被控对象的实际值与期望值(控制目标)之间的偏差来形成控制策略,只要合理整定PID增益使闭环控制系统稳定就能够实现控制目标,这正是经典PID控制方法获得广泛应用的根本原因[1-4].然而,PID问世近百年来,国内外几代学者都专注于增益的整定方法研究,而忽视了PID控制系统的基础理论研究.事实上,国内外每年发表PID整定方法的论文多达数万篇,主要分为传统整定方法[5-7]和现代整定方法[8-27]两大类.现有整定方法都集中表明:尽管PID控制律不依赖于被控对象模型,然而,PID增益却与被控对象、工况状态或外部扰动等密切相关,表明PID增益鲁棒性差与抗扰动鲁棒性差的突出问题已成为不容争辩的客观事实.确切地说,针对不同的被控对象,PID增益参数千差万别;针对同一个被控对象,即便是已整定好的PID控制器,一旦工况状态发生变化、或模型参数存在时变、或存在外部扰动等情况下,都需要重新整定PID增益.
在深入系统掌握PID控制、自抗扰控制(auto disturbance rejection control,ADRC)和滑模控制(sliding model control,SMC)的基础上,通过比较研究,深刻认识了PID增益鲁棒性差和抗扰动鲁棒性也差的突出问题,萌发了质疑PID控制理论的动机.尽管比例、积分和微分是3个不同属性的物理环节,然而却都与误差有关,因而这3个不同环节之间一定存在内在必然关系.根据该思想观点,作者创造性引入了速度因子zc(量纲:1/s)的概念,并根据闭环控制系统的稳定性要求,建立了以速度因子zc为核心联系因子的自耦PID(auto-coupling PID,ACPID)控制律及其增益整定规则(或称之为量纲换算规则),形成初步研究成果[28-30],分别如下:
1) ACPID控制律及其整定规则.
①ACPID控制律:

②ACPID整定规则:
2) ACPD控制律及其整定规则.
①ACPD控制律:

②ACPD整定规则:

3) ACPI控制律及其整定规则.
①ACPI控制律:

②ACPI整定规则:

其中:

显然,速度因子zc不仅定义了各增益的物理属性,明确了各增益的量纲换算规则,而且还是各增益之间内在必然关系的核心联系因子.在zc的同一协调指挥下,使得比例控制力、积分控制力和微分控制力能够实现功能各异且目标一致的协同控制机理,意外解决了PID控制系统存在增益鲁棒性差与抗扰动鲁棒性差的突出问题.然而,前期成果没有科学阐明形成ACPID控制理论(曾先后称之为扰动感知控制和智慧PID控制)的科学依据,特别是没有科学阐明形成增益整定规则(量纲换算规则)的理论依据.为此,近两年来一直围绕PID和ACPID做深入系统的探索研究,发现了一种能够科学揭示PID潜在理论缺陷以及阐明ACPID控制理论依据的科学方法,即PID控制系统的物理属性分析方法.
PID控制系统的物理属性科学揭示了纠错PID御用概念“无量纲比例增益与相互独立增益”的必要性和迫切性.在此基础上,本文深入系统探索了各增益的量纲换算规则,不仅科学阐明了形成ACPID控制律及其整定规则的理论依据,而且还科学解决了PID控制系统存在“量纲冲突”与“不协调控制机理”两个矛盾问题,进而科学引导了无论经典控制理论还是现代控制理论都应该遵循量纲匹配原则的控制理论思想.
2 PID控制系统物理属性
2.1 被控系统物理属性
1) 一阶系统的物理属性.
设任意一阶系统为
其中:u和y分别是系统的输入和输出;f(y1)是已知或未知线性或非线性光滑函数;y1是系统的状态;b0≠0是控制系数.
为了便于分析,PI控制系统如图1所示,其中r是系统期望输出.
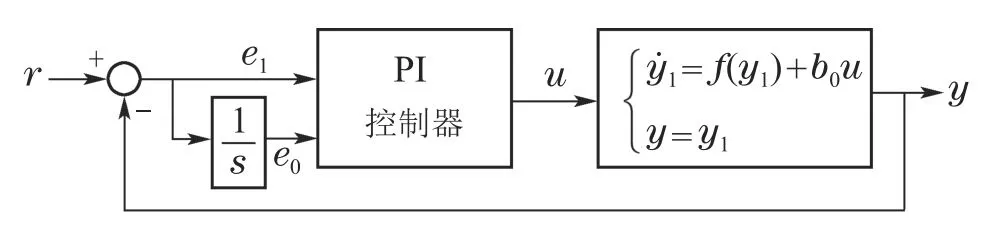
图1 PI闭环控制系统Fig.1 PI closed-loop control system
设y=y1是广义位移,由系统(7)可知,则是广义速度.因此,根据量纲对称原则:系统(7)的模型函数f(y1)以及控制输入b0u都具有广义速度的量纲属性.由于系统(7)的控制输入b0u来自于PI控制器的输出b0u,属于同一物理量,根据量纲匹配原则,要求PI控制器的输出b0u也应该具备广义速度的量纲属性.
2) 二阶系统的物理属性.
设任意二阶被控系统为
其中:u和y分别是系统的输入和输出;f(y1,y2)是已知或未知线性或非线性光滑函数;y1和y2是系统的两个状态;b00是控制系数.
为了便于分析,PID控制系统如图2所示,其中r是系统期望输出.
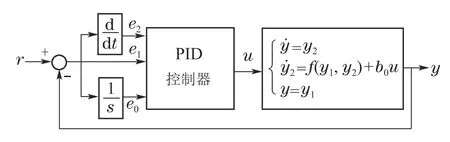
图2 PID闭环控制系统Fig.2 PID closed-loop control system
设y=y1是广义位移,由系统(8)可知:y2则是广义速度则是广义加速度.因此,根据量纲对称原则:系统(8)的模型函数f(y1,y2)以及系统输入b0u都具有广义加速度的量纲属性.由于系统(8)的控制输入b0u来自于PID控制器的输出b0u,属于同一物理量,根据量纲匹配原则,要求PID控制器的输出b0u也应该具备广义加速度的量纲属性.
以此类推,对于任意三阶系统而言,其系统控制输入b0u具有广义加加速度的量纲属性,因此,无论使用经典控制理论方法还是现代控制理论方法设计的控制器输出b0u,也应该要求广义加加速度的量纲属性.
2.2 PID控制器的物理属性
1) PID增益的御用概念.
在PID控制理论中,通常使用默认的PID御用概念“无量纲比例增益与相互独立增益”,即:kp是无量纲比例增益;且比例增益kp、积分增益ki以及微分增益kd是相互独立的增益变量.
尽管PID增益之间存在相互关系:ki=和kd=kpTd,其中Ti和Td分别是独立的积分时间常数和微分时间常数,其量纲均为秒.然而,通常默认kp,Ti和Td是相互独立的变量,因而kp与ki之间的关系ki=存在很大不确定性,客观而言,ki与kp是相互独立的;同理,kd与kp以及ki与kd也都是相互独立的,因而kp,ki和kd是相互独立的增益变量,在PID的实际控制过程中也是如此考虑.
2) PID各环节的物理属性.
不失一般性,设系统(7)-(8)的实际输出y=y1与期望输出r均为广义位移,且y2=均为广义速度,相关物理量的量纲属性分别如下:
①跟踪误差:e1=r-y是广义位移偏差,具有广义位移的量纲属性;
②误差积分:e0=具有广义位移·秒的量纲属性;
③误差微分:e2=是广义速度偏差,具有广义速度的量纲属性.
3) PID控制律(控制力)的物理属性.
对e1,e0和e2进行加权求和构成的PID控制律(或控制力)u为
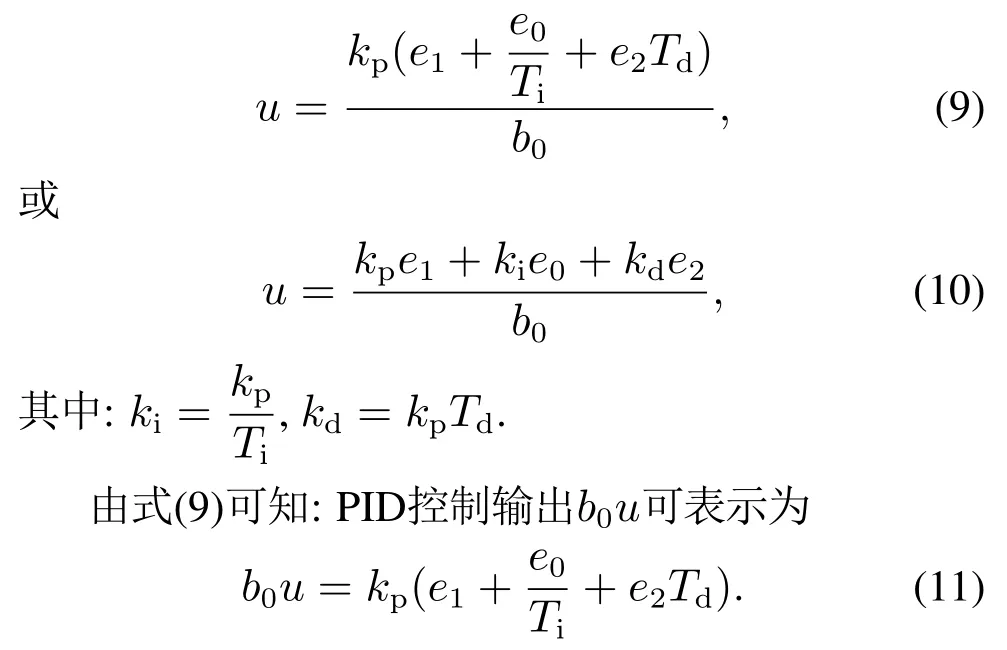
根据e1,e0和e2的广义物理属性可知中的每一项都只有广义位移的量纲属性,因此,无量纲比例增益kp会使式(11)的PID控制输出b0u只有广义位移的量纲属性.同理,无量纲kp会使PI控制输出

以及PD控制输出b0u=kp(e1+e2Td)也都只有广义位移的量纲属性.
综上,无量纲kp会使PID(包括PI和PD)控制输出b0u只有广义位移的量纲属性.
3 量纲冲突与不协调控制机理
3.1 量纲冲突
1) PI控制输出与一阶系统输入之间的量纲冲突.
由第2.1节可知,任意一阶系统的控制输入b0u具有广义速度的量纲属性,因而要求PI控制输出b0u也应该具有广义速度的量纲属性.然而,由第2.2节可知:无量纲kp会导致PI控制输出b0u只有广义位移的量纲属性,表明PI控制输出与任意一阶系统控制输入之间同一物理量b0u存在“量纲冲突”矛盾.
2) PID或PD控制输出与二阶系统输入之间的量纲冲突.
由第2.1节可知,任意二阶系统的控制输入b0u具有广义加速度的量纲属性,因而要求PID或PD控制输出b0u也应该具有广义加速度的量纲属性.然而,由第2.2节可知:无量纲kp会导致PID或PD控制输出b0u只有广义位移的量纲属性,表明PID或PD控制输出与任意二阶系统控制输入之间同一物理量b0u存在“量纲冲突”矛盾.
综上,无量纲kp会使PID(包括PD与PI)控制输出b0u都只有广义位移的量纲属性,而任意一阶或二阶系统的控制输入b0u则分别要求广义速度或广义加速度的量纲属性,表明PID控制输出与任意一阶或二阶系统的输入之间,同一物理量b0u却存在量纲冲突的矛盾.显然,纠错“无量纲比例增益”的御用概念不仅科学揭示了理论的必要性,而且也反映了实际控制工程的迫切性.
3.2 不协调控制机理
根据PID御用概念“无量纲比例增益与相互独立增益”,使用相互独立的kp,ki和kd分别形成的比例控制力up=积分控制力ui=以及微分控制力ud=也是相互独立的,它们在控制过程中很可能表现出各自为阵的“不协调控制机理”矛盾,因而科学揭示了纠错“相互独立增益”御用概念的必要性与迫切性.
总之,根据PID御用概念,PID控制系统不仅存在量纲冲突矛盾,而且也存在各自为阵的不协调控制机理矛盾.不难想象,正因为PID御用概念引起的这两个矛盾才会导致PID增益鲁棒性差和抗扰动鲁棒性差的突出问题,因此,纠错PID御用概念是一项开创性的探索研究工作.具体而言,需要从两个方面进行探索研究:其一是科学定义比例增益的量纲属性,以纠错无量纲比例增益的御用概念;其二是深入系统探索PID增益之间的内在关系,以纠错相互独立增益的御用概念.
4 纠错PID御用概念的科学设想
由于PID御用概念是导致PID控制系统存在“量纲冲突”与“不协调控制机理”两个矛盾的理论根源,因此,纠错PID御用概念已成为本文的核心研究焦点.
4.1 阐明比例增益的量纲属性
具体而言,根据PID 控制输出b0u 与系统控制输入b0u之间的量纲匹配原则,纠错PID御用概念涉及的核心问题之一是纠错无量纲比例增益的御用概念.
1) 任意一阶系统要求PI控制器的比例增益量纲为1/s,即kp∝s-1.
由第2.1节可知:任意一阶系统的控制输入b0u具有广义速度的量纲属性;由第2.2节可知:为了遵循量纲匹配原则,只要定义比例增益kp具有1/s的量纲属性,即kp∝s-1,则可使PI控制器输出b0u满足广义速度的量纲属性:b0u=
2) 任意二阶系统要求PID或PD控制器的比例增益量纲为1/s2,即kp∝s-2.
由第2.1节可知:任意二阶系统的控制输入b0u具有广义加速度的量纲属性;由第2.2节可知:为了遵循量纲匹配原则,只要定义比例增益kp具有1/s2的量纲属性,即kp∝s-2,则可使PID或PD控制输出b0u分别满足广义加速度的量纲属性,即分别为

或b0u=kp(e1+e2Td).
显然,只有科学定义了kp的量纲属性,才能科学解决PID控制输出b0u与被控系统输入b0u之间同一物理量的“量纲冲突”问题.
4.2 阐明PID增益之间的内在关系
尽管比例、积分和微分是3 个不同属性的物理环节,然而却都与误差有关,因而三者之间一定存在内在必然关系.因此,纠错PID御用概念涉及的核心问题之二是探索PID增益之间的内在关系,以纠错相互独立增益的御用概念.
由于PI控制器适合于一阶系统的控制,为了实现PI控制输出b0u与任意一阶系统控制输入b0u之间的量纲匹配关系,由第4.1节可知,要求比例增益的量纲属性为kp∝s-1;再根据ki=的关系,则有ki∝s-2,因而要求PI 控制器增益之间应该满足内在关系
2) PID控制器增益之间应该满足内在关系ki∝与kp∝
由于PID控制器适合于二阶系统的控制,为了实现PID控制输出b0u与任意二阶系统输入b0u之间的量纲匹配关系,由第4.1节可知:要求比例增益的量纲属性为kp∝s-2;再根据ki=与kd=kpTd的关系,则有kp∝s-2,ki∝s-3,kd∝s-1,因而要求PID控制器增益之间应该满足内在关系
3) PD控制器增益之间应该满足内在关系kp∝
由于PD 控制器适合于二阶系统的控制,为了实现PD控制输出b0u与任意二阶系统输入b0u之间的量纲匹配原则,由第4.1节可知:要求比例增益的量纲属性为kp∝s-2;再根据kd=kpTd的关系,则有kd∝s-1,因而要求PD控制器的增益之间应该满足内在关系
然而,上述增益之间的内在关系只是各增益量纲属性之间的定性关系,为了获得增益之间的定量关系,需要做进一步深入系统的探索研究.
4.3 科学阐明自耦PID控制律的理论依据
本文通过PID控制系统的物理属性分析,科学揭示了PID御用概念会导致PID控制系统出现量纲冲突与不协调控制机理的两个矛盾,科学阐明了纠错PID御用概念的必要性和科学设想,科学解释了ACPID(包括ACPI和ACPD)控制律及其增益的量纲换算规则(增益整定规则),分别见式(1)-(6).
①由式(1)可知,ACPID控制输出:

具有广义加速度的量纲属性,与任意二阶系统控制输入b0u要求的量纲属性相匹配;
②由式(3)可知,ACPD控制输出

也具有广义加速度的量纲属性,与任意二阶系统控制输入b0u要求的量纲属性相匹配;
③由式(5)可知,ACPI控制输出

具有广义速度的量纲属性,与任意一阶系统控制输入b0u要求的量纲属性相匹配.
综上,速度因子zc不仅实现了ACPID(包括ACPI和ACPD)控制输出与系统输入之间同一物理量b0u的量纲匹配问题,而且还建立了ACPID增益之间的内在定量关系.由于ACPID增益整定规则就是增益的量纲换算规则,因而科学纠正了PID御用概念“无量纲比例增益与相互独立增益”的历史性错误.
5 鲁棒稳定性分析
为了分析ACPID(包括ACPI和ACPD)控制理论方法的有效性,下面以ACPID控制系统为例进行理论分析.为例节省篇幅,省去了ACPI和ACPD控制系统的理论分析.
定理1当且仅当zc>0时,ACPID闭环控制系统是有界输入有界输出稳定的.
证在外部扰动情况下,系统(8)可改写为
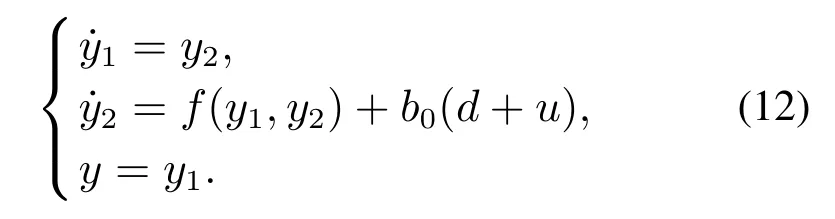
设系统(12)的期望输出为r,则有误差及其积分和微分分别为
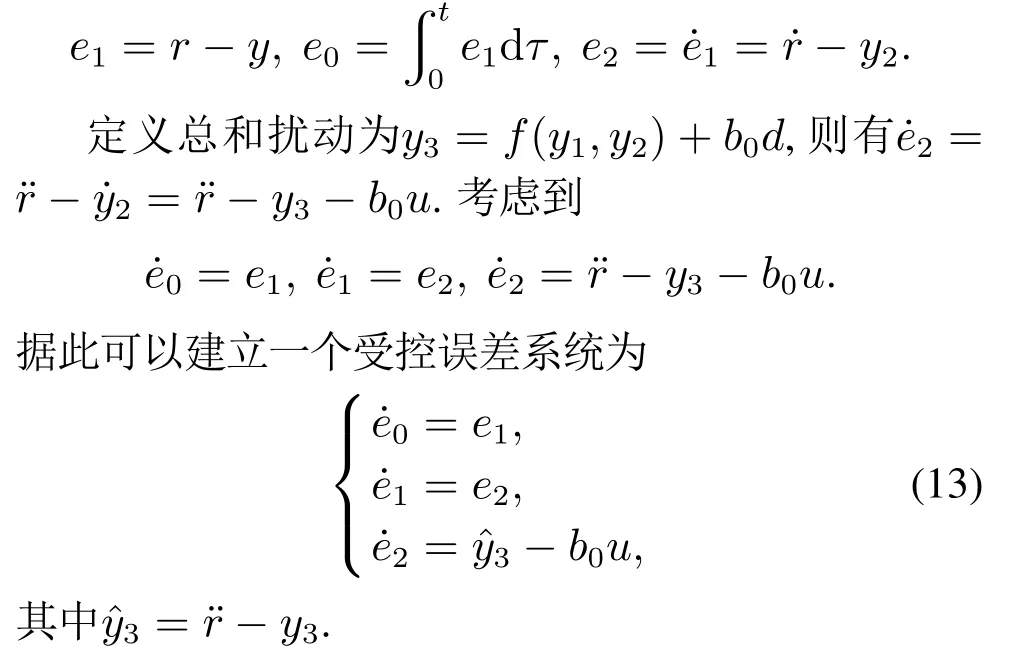
将式(1)定义的ACPID控制律代入受控误差系统(13),可得闭环控制系统如下:
显然,ACPID闭环控制系统(14)实际上是一个在总和扰动3激励下的误差系统,而且是一个因果系统.考虑到初始状态:因此,对系统(14)取单边拉普拉斯变换,并整理得

其中:系统(15)的第1项是零输入响应E1x(s);第2项是零状态响应E1f(s),即
定义闭环系统的传输函数为

当zc>0时,由于H(s)在复频域的左半平面有唯一的三重实极点sp=-zc<0,因而系统(16)或系统(15)是有界输入有界输出稳定的.证毕.
定理2设总和扰动有界|y3|<∞,则当且仅当zc>0时,ACPID控制系统具有良好的抗总和扰动鲁棒性.其中,总和扰动为y3=f(y1,y2)+b0d;f(y1,y2)是任意二阶系统的已知或未知模型函数;d是未知外部有界扰动.
证根据系统传输函数(16),闭环系统(15)可改写为

以上分析表明:当zc>0时,只要满足|y3|<∞,闭环系统(14)则可以从任意不为零的初始误差状态向稳定的平衡点原点(0,0)趋近,理论上可以实现零误差跟踪控制.当zc>0时,由于e1→0和e2→0只与|y3|<∞有关,与y3的具体模型毫无关系,因此,ACPID闭环控制系统具有良好的抗总和扰动鲁棒性,包括抗外部扰动鲁棒性、抗时变鲁棒性、抗耦合鲁棒性等.证毕.
6 自适应速度因子
由上述各定理及其证明可知:当且仅当zc>0时,ACPID(包括ACPI和ACPD)控制系统是有界输入有界输出稳定的,表明速度因子具有很大的整定裕度,因而ACPID控制系统是大范围稳定的.当zc较大时,由于比例控制力特别是积分控制力较大,尽管可以加快系统的响应速度、增强抗扰动能力,然而,也很可能会使系统输出存在超调现象,并使控制力出现震荡现象,不利于执行机构;当zc较小时,由于比例控制力和积分控制力都较小,因而不仅会降低系统的响应速度,而且也会降低稳态控制精度和抗扰动能力.因此,为了获得控制系统良好的动态品质与稳态性能,应该使用自适应速度因子.
考虑到被控系统的控制输入u来自于ACPID的控制输出u,因此,ACPID控制器的速度因子zc与被控对象的动态速度一定存在外在的必然关系.假设被控对象的时间尺度为τ,那么,τ越小,被控对象的动态速度则越大,否则反之,因此,被控对象的动态速度可以表示为.然而,对于非线性系统而言,τ是一个既具体有抽象的物理量,难以由理论或实验来获取τ.为此,本文引入另一个时间物理量Tr,并称之为控制系统的过渡过程时间(控制系统由动态过程进入稳态过程的时间),且设Tr=10τ,因此,被控对象的动态速度可以间接表示为
6.1 ACPI控制器的自适应速度因子
根据ACPI 整定规则(6):kp=2zc,ki=并考虑到PI增益关系ki=可得ACPI控制器的速度因子为zc=为了保证ACPI控制器能够有效控制任意一阶对象,要求ACPI的速度因子满足不等式
因而可得ACPI控制器的最小速度因子模型为

其中:1 <α ≤10,Tr是由动态过程进入稳态过程的过渡过程时间,下同.
由于ACPI控制器没有微分环节,无需考虑自适应速度因子,因此其速度因子可为

6.2 ACPD控制器的自适应速度因子
根据ACPD整定规则(4):kp=kd=2zc,考虑到PD增益关系kd=kpTd,可得ACPD的速度因子为为了保证ACPD控制器能够有效控制任意二阶对象,要求ACPD的速度因子满足不等式
因而可得ACPD控制器的最小速度因子模型为

其中:1 <α ≤10,Tr是由动态过程进入稳态过程的过渡过程时间.
考虑到误差微分的敏感特性,定义ACPD控制器的ASF模型为

其中:β=1+0.1α,e2=
6.3 ACPID控制器的自适应速度因子
根据ACPID的整定规则(2):kp==3zc,并考虑到PID的增益关系ki=和kd=kpTd,可得ACPID控制器的速度因子为
为了保证ACPID控制器能够有效控制任意二阶对象,要求ACPID的速度因子满足不等式
因而可得ACPID控制器的最小速度因子模型为

其中:1 <α ≤10,Tr是由动态过程进入稳态过程的过渡过程时间.
考虑到误差微分的敏感特性,定义ACPID控制器的ASF模型为

其中:β=1+0.1α,e2=
6.4 Tr的整定方法
控制系统过渡过程时间Tr的具体整定方法为:如果要求控制系统在1 s之内进入稳态过程,可设Tr=1 s;如果要求控制系统在10 s之内进入稳态过程,则可设Tr=10 s;以此类推.显然,根据被控系统是快对象还是慢对象来整定Tr是一件很容易的事情.
7 仿真实验
考虑二阶未知非仿射非线性系统[29,31]

其中:未知非仿射非线性系统动态模型为
d为外部有界扰动.
设期望输出是存在突变的阶跃轨迹:

为了验证ACPID的抗扰动能力,设在[6,8]s期间内存在幅值为±1的外部扰动,如图3所示.
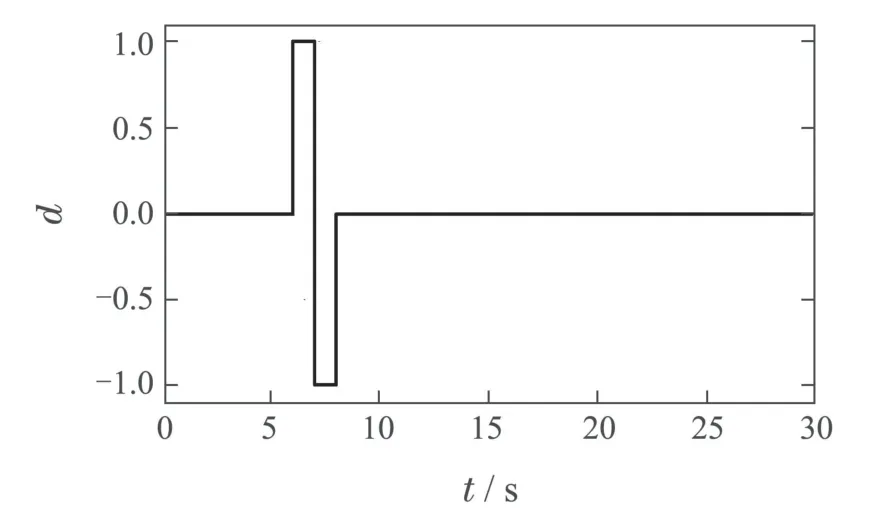
图3 外部扰动Fig.3 The external disturbance
设Tr=1 s,则有zcm=10α.当α=5 时,β=1+0.1α=1.5;根据式(23),ACPID控制器的自适应速度因子为zc=50 exp(-1.5|e2|);设系统最大输入幅值um=5,并设积分控制力ui与控制力u分别限幅为-4≤ui≤0,-5 ≤u ≤5.
当b0=1时,使用ACPID控制器(1)对系统(27)进行控制,仿真结果如图4所示.由图4可知,ACPID控制方法不仅具有快的响应速度和良好的抗扰动鲁棒性,而且稳态绝对误差小于2.4×10-4.由于文献[29,31]没有考虑期望轨迹突变情况,因此无法与之作比较分析.
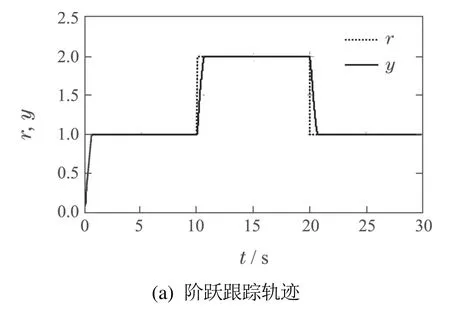
图4 阶跃跟踪控制结果Fig.4 Step tracking control results
事实上,在速度因子相差10倍,即积分增益、比例增益和微分增益分别相差1000倍、100倍和10倍的情况下,ACPID协同控制器都能够获得良好的控制效果,表明ACPID协同控制方法具有大范围鲁棒稳定性,因篇幅有限,没有给出α=1和α=10两种情况下的实验结果.
8 结论
本文首次根据PID控制系统的物理属性分析,科学揭示了PID御用概念“无量纲比例增益与相互独立增益”不仅是引起PID控制系统存在量纲冲突与不协调控制机理的矛盾根源,而且也是引起PID增益鲁棒性差与抗扰动鲁棒性差的主要根源,因而科学阐明了纠错PID御用概念的必要性和迫切性,探索了纠错PID御用概念的科学设想,并根据量纲匹配原则,科学解释了形成ACPID控制律及其增益整定规则(量纲换算规则)的理论依据.由于被控系统的输入来自于控制器的输出,因此,无论使用经典控制理论方法还是现代控制理论方法,都应该使控制器输出与系统输入之间遵循量纲匹配原则.
ACPID是源于PID的一类协同控制理论方法,不仅科学解决了PID增益鲁棒性差与抗扰动鲁棒性差的难题,而且开创了遵循量纲匹配原则的控制理论思想,为PID控制系统的技术评估与技术升级提供了科学的理论依据,在控制理论与控制工程领域具有重要的理论与实际意义.
猜你喜欢
辽宁师范大学学报(自然科学版)(2021年4期)2022-01-10
南宁师范大学学报(自然科学版)(2021年2期)2021-07-29
北京航空航天大学学报(2021年6期)2021-07-20
科技研究·理论版(2021年22期)2021-04-18
农业机械学报(2020年2期)2020-03-09
电子制作(2019年19期)2019-11-23
电子制作(2018年19期)2018-11-14
数学学习与研究(2018年12期)2018-08-17
上海师范大学学报·自然科学版(2018年3期)2018-05-14
电脑知识与技术(2016年28期)2016-12-21
