一种改进的特征匹配算法在碎片云测量建模中的应用
2021-01-29 06:00吕伟臻黄雪刚
振动与冲击 2021年2期
吕伟臻,宋 燕,黄雪刚,殷 春
(1. 上海理工大学 光电信息与计算机工程学院,上海 200093;2. 中国空气动力研究与发展中心 超高速空气动力研究所,四川 绵阳 621000;3. 电子科技大学 自动化工程学院,成都 611731)
随着航空航天事业发展以及人类在外太空活动的日益频繁,太空垃圾的数量与日俱增。这些太空垃圾与在轨航天器以数公里每秒甚至数十公里每秒的极高相对速度飞行,极大可能发生超高速撞击事件,对航天任务的顺利执行以及航天器和航天员的安全产生极大的威胁,甚至导致灾难性的事故发生[1-2]。因此,设计制造一些特殊的防护结构对于保障航天器在轨安全运行是必不可少的。
Whipple防护构型是Fred Whipple在1947年设计制造的一种经典的防护结构,它由两块具有一定间隔距离的金属板组成[3-4],前板缓冲屏用于破碎超高速来袭的空间碎片,并使其充分破碎形成不断扩张发展的形如空泡的碎片云结构,从而有效地降低对后板的动能损伤。为了研究防护构型的防护性能以及碎片云的形成机制,可以采用二级轻气炮加速弹丸来模拟空间碎片超高速撞击过程,记录并观察碎片云发展过程及其对后板形成的损伤状态,并且超高速撞击的实验结果对于防护结构的设计以及不同状态下太空垃圾对航天器的损伤预估是至关重要的[5]。
在超高速撞击问题研究的初期,研究人员主要关注的重点是超高速撞击对飞行器破坏时产生的力学损伤效应,之后又在理论、数值模拟和实验方面做了大量的工作。数值模拟的方法由于其花费较少,并且可以多次重复实验,已受到越来越多的关注。研究人员可以使用Euler[6]、SPH(Smoothed Particle Hydrodynamics)[7]等较为成熟的算法去模拟碎片云的动态形成过程。但是,数值模拟的办法也存在一定的局限性。首先,算法本身就会存在一定的计算误差,其次,数值模拟的过程过于理想化,这一类算法的本质是通过模拟每一个粒子的相互作用和运动过程去建立碎片云的动态模型,而实际碰撞实验中产生的碎片无法在仿真中被清晰和准确地描述。因此,使用真实的实验数据来构造碎片云的运动模型就变得十分重要。
从目前的研究成果中可以发现,大多数超高速撞击损伤结果分析主要是基于大量实验数据展开的,并积累了一些经典的损伤经验公式。例如经典的Piekutowski[8]模型,该模型通过改变实验条件,对不同材料、弹丸形状和发射速度等因素对超高速撞击产生的影响做了系统的研究。王猛等[9]通过使用超高速摄像机观察并记录不同形状的弹丸以不同速度正撞击产生溅射物形态以及分布情况。盖芳芳等[10]经过多次实验,建立压力容器后壁损伤预报模型,对压力容器后壁在碎片云、气体冲击波下发生损伤的过程进行了分析。迟润强等[11-14]不仅利用X射线相机对弹丸撞击薄板之后破碎的状态进行研究,而且创新性地使用撞击产生的声发射信号对铝合金蜂窝板的损伤情况进行识别。对超高速撞击形成的碎片进行研究较少的主要原因在于难以获得高质量的实验图片[15]。因此,如果能通过图像处理技术等方法从少量的超高速撞击实验图片中获得重要的碎片特征,就可以与传统数值模拟结果进行对比,寻找其中的差异,这对于碎片云的研究意义十分重大。
本文通过超高速序列激光阴影成像仪获取高质量的碎片云图片,结合二次碎片云的图像特点以及碎片的运动特性,提出了一种改进的碎片匹配二次特征提取算法。然后使用该算法对连续两帧碎片云图像进行处理,分析图像中碎片的运动轨迹及运动特性,获取二次碎片云相关运动特性,并通过与真实超高速撞击结果进行对比,验证其有效性。
1 基于碎片云图像的特征匹配算法
1.1 常用的特征提取算法介绍
图像处理技术又称为数字图像处理,旨在使用计算机对图像进行分析,以达到所需要结果的技术[16]。通过对碎片云图像的处理,可以建立图像帧与帧之间每一个碎片之间的联系,从而构建碎片云轨迹模型。同时,通过获取每一个碎片在相邻帧图像中的位置变化,来分析碎片的速度分布以及飞行角度分布,从而更好的加深对碎片云发展过程和损伤机理的理解。
图像处理主要分为三个步骤:图像预处理、图像分割以及特征提取。图像预处理是用于去除图像中的噪声;图像分割是用于将图像中的前景与背景分离,消除无用信息,方便下一步的特征提取;特征提取是使用计算机提取图像中属于特征信息的一种方法与过程。
图像的特征提取是图像处理重要的环节之一,在模式识别中,进行不同图像的匹配识别或者针对不同物体分类识别的主要依据就是图像的特征。图像的特征大致可分为三个部分,分别是颜色特征、纹理特征和形状特征[17]。不同的特征提取算法,针对不同的应用场景具有各自的优势。例如纹理特征,它是一种基于像素点的描述物体表面的特征,常用于人脸识别领域;而形状特征通常用于对图像中某些物体的轮廓特征提取,达到物体识别的目的。
表1所展示的是目前比较常用的特征提取算法,并对每一个算法的优点、缺点,以及特征描述子的特点做了简单的介绍。为了选取最适宜碎片云特征提取的算法,需要对碎片云图像的特点进行分析。针对目前由超高速序列激光阴影成像仪所获得的碎片云图像,其图像特点可归结为:①在碎片云图像中,碎片与背景的对比度较高,碎片整体呈黑色颗粒,形状较为明显;②不仅整个碎片云一直处于扩张发展状态,其中的每一个碎片也在不停的旋转,需要结合其运动特性提取相应的特征。
基于上述两个特点,不难发现,由于碎片为黑色颗粒,很难对其进行颜色特征和纹理特征提取,并且碎片云一直处于变化状态,提取的特征会受到多种因素干扰,匹配精度很难保证。经过上述分析,在表一所展示的5种特征提取算法中,Hu矩特征相对来说比较适合完成碎片的特征提取及匹配工作。但是需要说明的是,若只对碎片云提取某种单一的特征会受到碎片本身运动状态变化的影响,很难完成两帧图像间相同碎片的匹配,所以,本文提出了一种结合碎片云运动特性的碎片云二次特征提取算法。

表1 常用特征提取算法介绍
1.2 改进的碎片云二次特征匹配算法
由于碎片云在三维空间中形成,而摄像机只能将其映射在二维空间,碎片在飞行过程中发生的翻转现象,在图像中所反映出的是碎片的形变。如果单独对每一个碎片进行特征提取之后寻找帧与帧之间相同碎片的联系,图像中碎片的形变会对其造成很大的干扰,所以本文采用的策略为先从碎片云整体出发,找出碎片云每一帧的变化规律,之后再化整为零,建立相邻帧图像中每一个碎片之间的联系。
1.2.1 碎片粗定位
基于以上讨论可知,由于碎片云在三维空间中会发生翻转现象,所以在二维碎片云图像中就会被描述为碎片的形变,这种形变所造成的结果就是碎片的特征会急剧的变换。所以要将碎片云看成一个整体,通过分析碎片云整体的变化特征来进行碎片的粗定位。
首先对相邻两帧碎片云图像中的碎片进行遍历,并分别计算出两张图中所有碎片的质心,可以得到两张碎片云图中各自4个碎片云顶点的坐标。如图1所示:xleft和xright分别为碎片云在X方向上的最大和最小值;ytop和ybottom分别为碎片云在Y方向上的最大和最小值。
经过上述对两张图各自边缘点的计算,就可以得到碎片云在连续的两帧图像中的X方向和Y方向的膨胀比例xrate和yrate,计算公式为
(1)
(2)
在获取碎片云X方向的膨胀系数xrate和Y方向的膨胀系数yrate之后,就可以对第一帧图像中的碎片确定在第二帧图像中的大致坐标位置。首先,对第一帧图像中的每一个碎片取其质心坐标(xi,yi),之后使用xrate和yrate计算其在下一帧图像中的位置,具体计算公式为
xbase=xleft
(3)
(4)
x′=(xi-xbase1)×xrate+xbase2
(5)
y′=(yi-ymid1)×yrate+ymid2
(6)
在式(3)和式(4)中:xbase为每一帧图像中碎片云X方向基准位置,规定它与这张图中的xleft值相等;ymid为每一帧图像中碎片云Y方向基准位置,它的值为碎片云图像Y方向的中点(见图1)。在式(5)和式(6)中,xbase1,xbase2,ymid1,ymid2分别为相邻两帧碎片云图像各自的X方向和Y方向基准位置。通过式(5)和式(6),就可以计算出第一帧图像中的碎片在第二帧图像中的大致坐标(x′i,y′i)。为了增加碎片匹配的鲁棒性,在图像中以(x′i,y′i)为中点,10个像素为半径,规划出每一个碎片的(Region of Interest, ROI)区域,之后将在该区域内搜索与此碎片最相近的碎片。以上即为碎片的粗定位工作。
图1 碎片云结构示意图Fig.1 Schematic drawing of debris clouds
1.2.2 碎片特征定义及初步匹配
碎片的粗定位只是提供碎片在两帧图像中大致位置变化区域,如果想准确的定位碎片,还得用数学的方法去描述碎片的特征。
就如之前所提到的,在碎片云的形成过程中,每一个小碎片都会发生不同程度的翻转,这种翻转在二维图像中就表现为碎片的形变。所以如果使用传统的特征描述方法,去提取碎片的轮廓特征,显然会对后期的碎片匹配造成很大的误差。再次观察经过预处理和图像分割之后的碎片云图片,可发现图中基本不存在碎片的角点特征或纹理特征。因此,为了能更好地描述碎片特征,方便之后的碎片精确匹配,本文自定义了一个碎片的特征描述公式为
A=Rarea+Rblackrate
(7)
式中:R为每个碎片的外接最小矩形;Rarea为每个矩形框的面积;Rblackrate为黑色像素点占整个矩形框面积的比率。
通过式(7),可得到每一个碎片的特征值,再结合碎片粗定位得到的结果,将第一帧图像中的每个碎片在第二帧图像中对应的ROI区域内搜索与其特征值最相近的碎片,从而完成了碎片的初步匹配工作。
1.2.3 碎片的精确匹配
虽然之前已经完成了碎片的初步匹配,第一帧图像中的碎片根据式(7)已经在第二帧图像中找到与之最相似的碎片,但是这种匹配的结果还是存在误差。接下来将运用透射变换的概念完成碎片的精确匹配。
透射变换主要是利用透视中心、像点和目标点三点共线的条件,使用透射旋转定律将投射面按照透射轴旋转某一角度,但仍能保持投影之后的几何图形不变形的变换方法[18]。透射变换也可以理解为一种改变图像中物体尺寸和形状的操作,一个经过透射变换后的平面可产生立体效果。透射变换的具体公式为
(8)
式中:u,v为原始图片的坐标;x,y为经过透射变换之后的图像坐标。使用透射变换之前,需先求得透视变换矩阵。根据式(8),可发现求解的目标矩阵维度为3×3,所以需要4组由式(7)得到的匹配点才能计算出此矩阵。为保证选取匹配点均匀分布,将碎片云图像划分为左上、左下、右上和右下4个同等大小的部分(见图1),并在每个部分中,选取一个特征值最相似的匹配点对。根据上述步骤,可完成4组匹配点对的选取,并成功地计算出相邻两帧图像的透射变换矩阵。
计算完透射变换矩阵之后,就可实现碎片的精确匹配。通过提取第一帧图像中碎片的质心,使用式(8),得到透射变换后的新坐标。接着在第二帧图像中,寻找是否有碎片包含此新坐标,如果包含,则代表两张图像中相对应的碎片匹配成功,从而完成碎片的精确匹配工作。
2 实验与结果
2.1 超高速撞击实验
2.1.1 实验条件及装置
图2展示的是由中国空气动力研究与发展中心,超高速空气动力研究所提供的二级轻气炮超高速撞击实验平台。装置中的二级轻气炮为7.62 mm口径,最高可使实验所用铝球加速至7.36 km/s,弹丸对防护构型前板的撞击速度由三站光电探测器测得。

图2 超高速撞击实验装置图Fig.2 Facility of the hypervelocity impact experiment
为进一步说明本文中所提出算法的有效性,将采用三组不同撞击速度的实验图像数据进行相同的图像处理,并进行验证。三组实验使用相同的Whipple防护板结构,材质为AL-6061铝合金,材料密度为2.73 g/cm3,屈服强度为273.6 MPa,前板厚1 mm,后板厚2 mm,板间距为80 mm,尺寸均为200 mm×200 mm。实验1中所采用的弹丸材质为2A12铝合金,直径为2.5 mm,撞击角度为0° ,撞击速度为3.24 km/s。具体实验参数如表2所示。
表2 超高速撞击实验1参数
实验2的参数如表3所示。实验2与实验1的参数只是在弹丸直径与弹丸撞击速度略有不同,增加实验2的目的是为了验证本文中提出方法具有一定的普适性。
表3 超高速撞击实验2参数
为了证明该方法再较高速度下也有较佳的处理结果,实验3中所采用的弹丸材质为2A12铝合金,直径为4.0 mm,撞击速度为5.18 km/s,撞击角度也为0°。具体实验参数如表4所示。
表4 超高速撞击实验3参数
由于本文所使用的三组实验撞击速度均低于5.7 km/s,并且采用的铝合金材质在此速度下通常不会发生熔融和汽化现象[19],所以忽略这两种现象对图像中碎片特征提取的影响,只考虑材料由于撞击从塑性形变到动态破碎阶段的变化,材料始终保持为固体。
2.1.2 碎片云原始图像
本次实验获得的碎片云图像由超高速序列激光阴影成像仪拍摄获得,在碎片云形成的前期,碎片重叠情况比较多,原因是碎片云的形成是在三维空间中,但超高速序列激光阴影成像仪拍摄的照片为二维,碎片云形成前期碎片没有得到充分扩张,使得投影到二维图像中时重叠情况比较严重,这对于之后的碎片图像特征提取是不利的,所以在本次实验中所选用的连续两帧图片处于碎片云成型的后期阶段。由于实验1与实验2图像采样间隔时间相同,所以选取两次实验中拍摄时间相同的图片,拍摄时间分别为超高速撞击发生后20 μs和25 μs,实验1如图3(a)和图3(b)所示,实验2如图3(c)和图3(d)所示。而实验3与实验1、实验2图像采样时间不同,所采用的图片拍摄时间分别为超高速撞击发生后16 μs和20 μs,具体如图3(e)和图3(f)所示。
观察图3(a)和图3(b)可知,由于实验1初速度较低,所撞击之后形成的碎片颗粒较大,轮廓较为清晰。实验2初始条件与实验1基本相似,但由于弹丸初速度以及直径较小,所以在相同时间段内形成的碎片云体积比实验1较小,具体见图3(c)和图3(d)。而实验3由于撞击初速度的增大,碎片尺寸变小,数量增加,通过观察图3(e)和图3(f)可知,在内核云部分,碎片数量较多,碎片图像重叠情况较为严重。
图3 碎片云原始图像Fig.3 Raw images of debris clouds
2.1.3 前后板图像
图4分别展示的是三次实验中经过铝合金弹丸撞击过后的前板照片。可以清晰地发现,在图4(a)与图4(b)中,由于实验1与实验2的初始条件基本相同,所以两次实验中的弹丸撞击前板后形成的穿孔大小也基本一致,实验1约为8 mm,实验2约为7 mm。实验3的弹丸不仅初速度更快,而且弹丸直径也大于实验1与实验2,所以在前板上形成了一个较大的穿孔,直径约12 mm(见图4(c))。由于铝合金材质强度和硬度较低,在三次实验图片中穿孔的周围都形成了一定的翻边现象。
图5为由碎片云撞击后板形成的损伤特征。从图5可知,在三次实验中,整个后板的撞击损伤都是呈圆形散布。其中实验1与实验2由于碎片初速度较低,碎片对后板的损伤程度较轻,但实验1相对于实验2在弹丸直径和初速度略有提高,所以碎片撞击坑的分布也相对较大,大致为65 mm(见图5(a)),实验2所造成的损伤范围较小,大致为53 mm(见图5(b))。而实验3由于弹丸撞击初速度更快,质量也更大,撞击之后形成的内核碎片云体积较大,所以对后板中心部分形成穿孔损伤,与此同时,其外泡碎片云的体积也较大,较实验1与实验2会对后板造成更大的损伤面积,通过观察图5(c)可知,实验3后板撞击坑的分布半径约为85 mm。
图4 前板上撞击形成的孔洞Fig.4 The penetrated hole of the front bumper
图5 超高速撞击后的后板表面Fig.5 Surfaces of the rear wall after hypervelocity impact
通过图4和图5,可以清晰地知道三次试验分别对前板和后板形成的损伤,这里获得的结果可用于对后期碎片云图像处理所获得的结果进行验证。
2.2 碎片云图像处理结果
2.2.1 图像预处理及图像分割
为了更好地进行分析,首先,对实验1、实验2和实验3中的原图像进行裁剪,删除反溅碎片云等对后墙不产生损伤的多余部分,只保留前板与后板之间的正向碎片云图像,再将原图的RGB图转换为灰度图像,这样方便后期的处理。接下来对图像进行滤波处理,其目的是消除图像中的细小噪声。由于高斯核函数的特性,其中心具有较大的权重,在消除噪声的同时,不会对碎片图像造成形变,所以图像滤波所采用的算法是高斯滤波。
接着进行图像分割,由于碎片云图像中碎片与背景之间具有较好的区分度,所以采用阈值分割算法。阈值分割算法通过设定一个阈值,将灰度图所有的像素点按照其灰度值分为两个部分。通过阈值分割,可将原图中碎片与背景进行更为清晰的区分。
在实验1中,对获得的碎片云原图3(a)和图3(b)进行如上所述的处理,获得图6(a)和图6(b)。由于实验1中弹丸初速度较低,形成的碎片颗粒较大,轮廓也较为清晰,从图6中清晰可见碎片的轮廓有着较好的保留,这有利于之后进行的碎片特征提起及匹配工作。对实验2中的图3(c)和图3(d)也进行相同的处理,得到图7(a)和图7(b),由于实验2与实验1初始条件相同,所以在图片中大部分碎片都有较清晰的轮廓。图8所展示图片分别为由实验3中碎片云原图3(e)和图3(f)进行如上所述的处理得到的图片。实验3由于弹丸初速度较高,质量也较大,相比于实验1和实验2,形成密集的内核碎片云部分,使处理后的碎片云图像头部碎片堆叠情况严重,形成大片的黑色连续区域,而碎片云的中部和尾部碎片图像较清晰,分布也较均匀,方便后期处理。
2.2.2 连续帧碎片云匹配结果
使用本文提出的结合碎片云运动特性的二次特征匹配算法对三组实验所对应的图6、图7和图8中的碎片完成相同的匹配工作。图9、图10和图11分别展示的是三组实验碎片匹配的结果,图中数字标注相同的碎片代表同一实验相邻两张图片中匹配成功的碎片。在实验1和实验2所对应的图9和图10中,由于碎片分布较为均匀,碎片颗粒清晰,所以两组实验中大部分碎片完成匹配工作,匹配效果较好,实验1共有93个碎片完成匹配,实验2中共有78个碎片完成匹配。在实验3对应的图11中,由于内核碎片云部分碎片数量较密集,图像堆叠情况严重,在此部分匹配效果较差,而在碎片分布较为均匀的碎片云中部和尾部,碎片匹配效果较好,有131个碎片完成匹配。
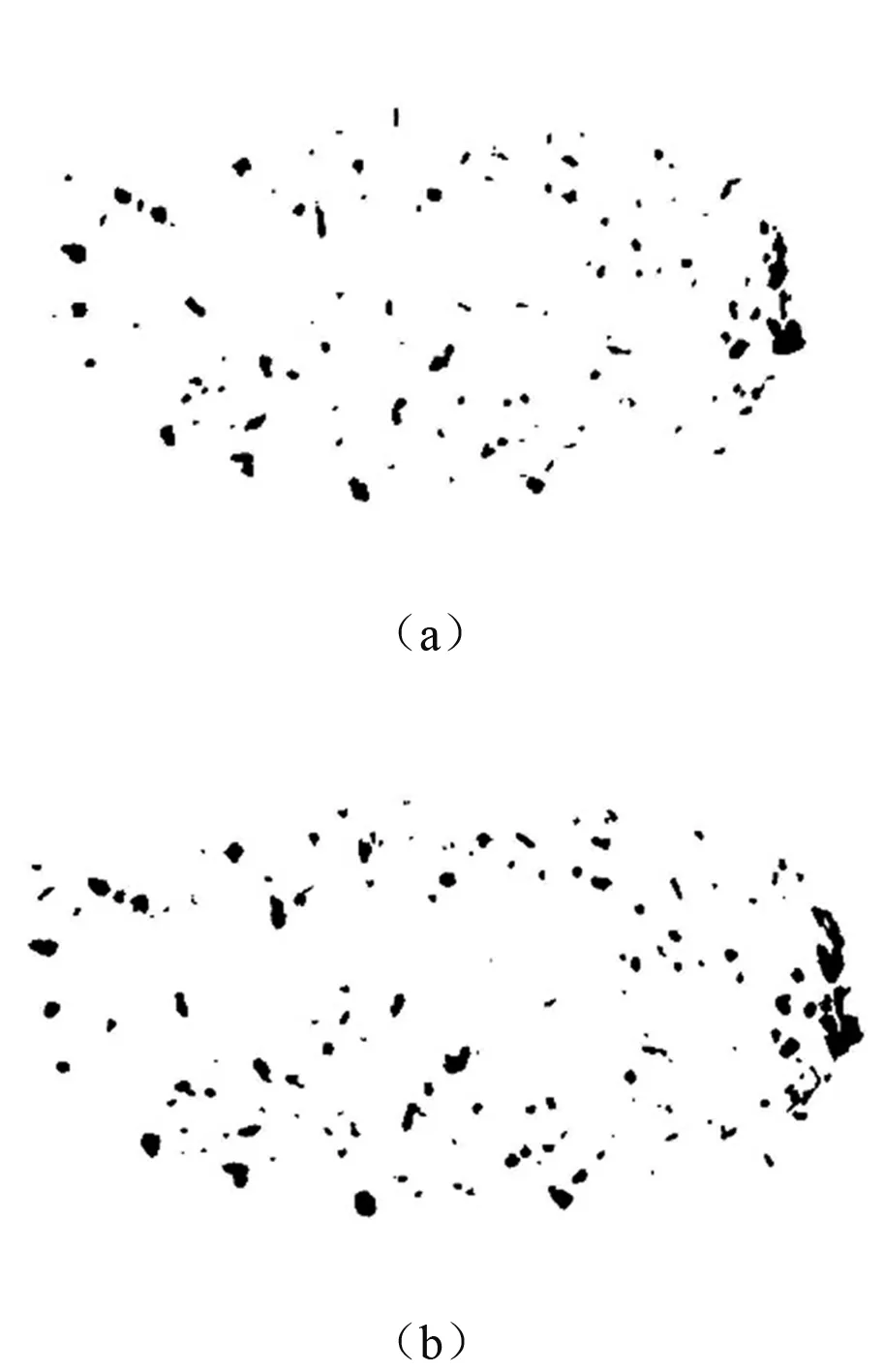
图6 实验1经过图像预处理及图像分割之后的碎片云图像Fig.6 Fragments of debris clouds after pre-processing and image segmentation in experiment 1
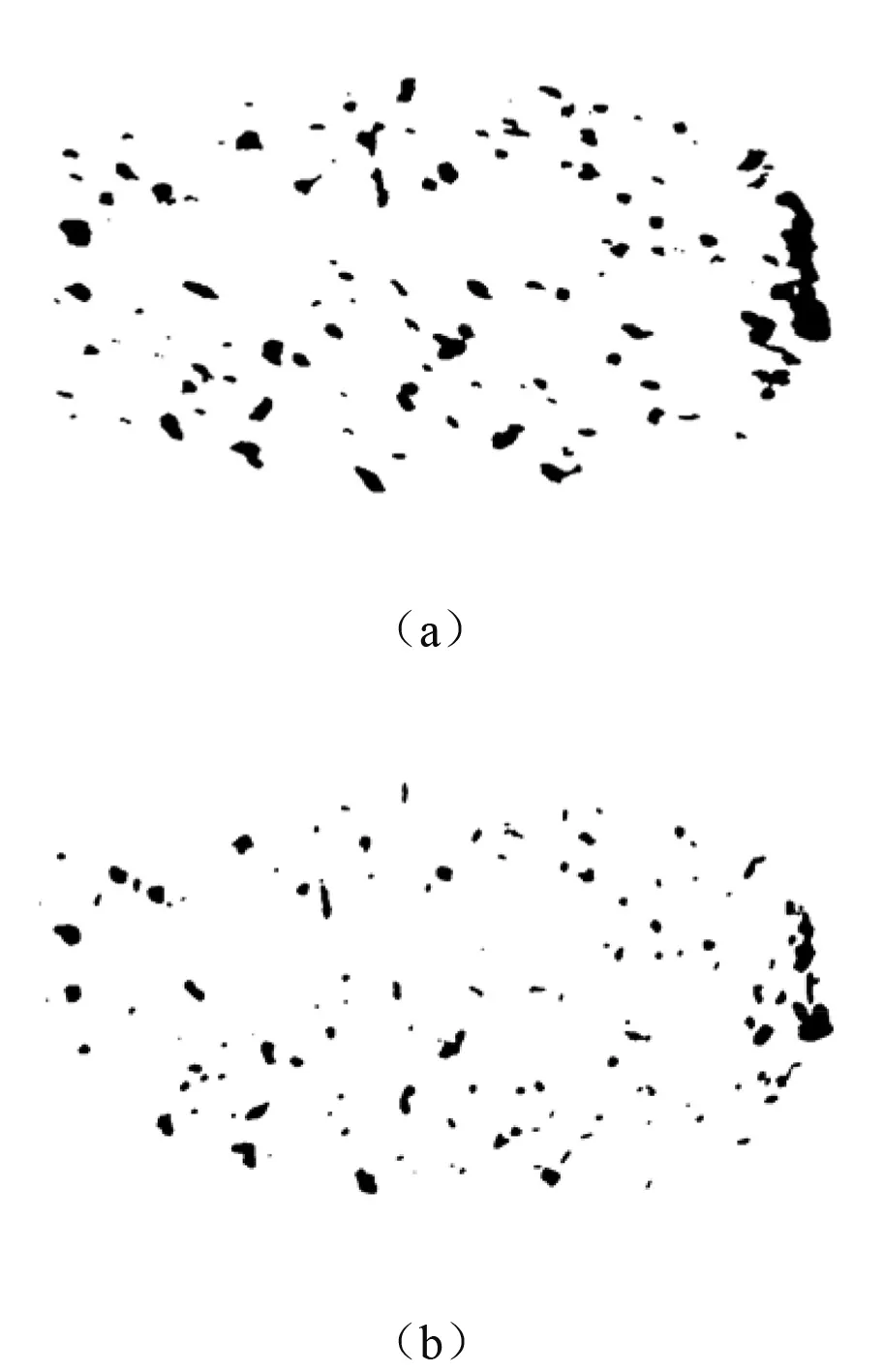
图7 实验2经过图像预处理及图像分割之后的碎片云图像Fig.7 Fragments of debris clouds after pre-processing and image segmentation in experiment 2

图8 实验3经过图像预处理及图像分割之后的碎片云图像Fig.8 Fragments of debris clouds after pre-processing and image segmentation in experiment 3
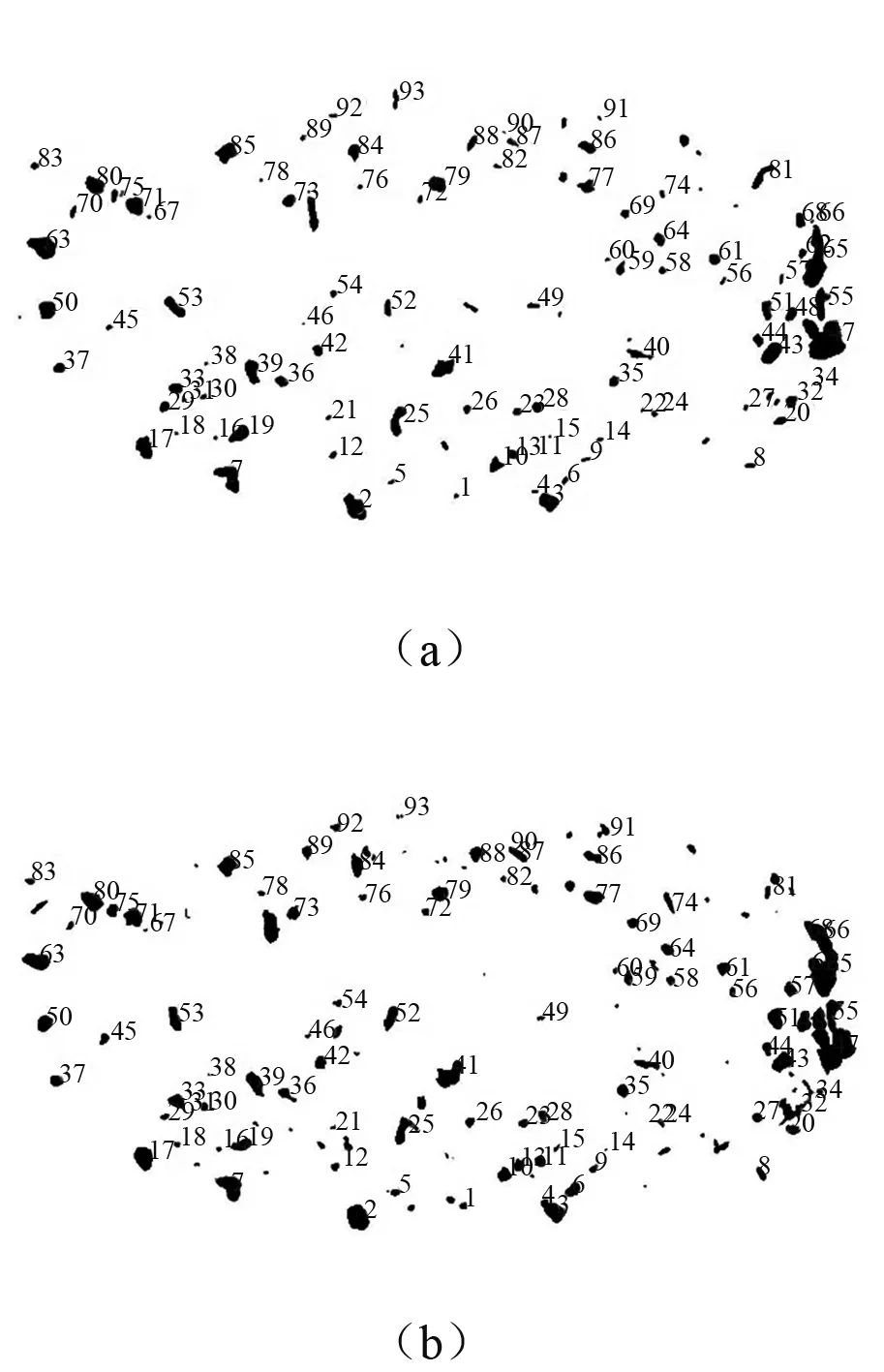
图9 实验1碎片匹配结果Fig.9 Fragment matching results in experiment 1

图10 实验2碎片匹配结果Fig.10 Fragment matching results in experiment 2
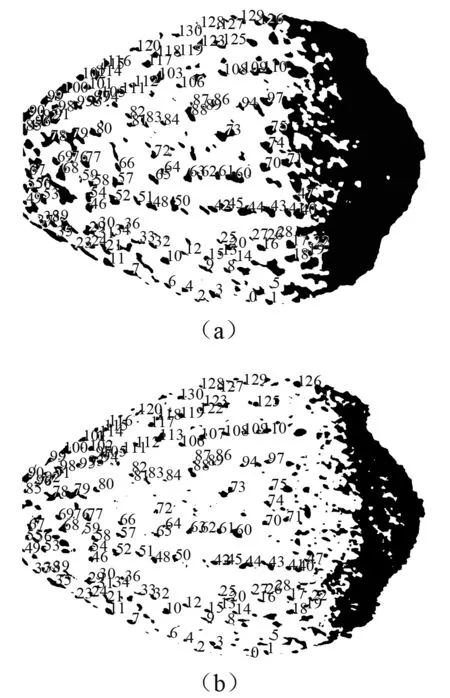
图11 实验3碎片匹配结果Fig.11 Fragment matching results in experiment 3
3 碎片云模型建立及验证
在第2章中,已经分别对三组实验图片中的碎片建立了联系,找出每一组实验中处于不同时刻的相同碎片。为了能更好的分析碎片云的特征,本文将利用之前的结果,进一步分析碎片的速度分布、飞行角度分布以及获取二次碎片云相关运动特性。
3.1 碎片的速度分布
根据图9、图10和图11中计算得到的结果,对于每一组实验,都可以分别获取同一个碎片在相邻帧图片中的质心像素坐标,由于两张图片的分辨率相同,且图片在水平方向实际的宽度正好为前板与后板的板间距,所以可以将碎片的像素坐标统一转化为毫米坐标,方便之后的速度统计。
在计算碎片速度之前,需要注意到在三组实验中,较短飞行距离的超高速碎片由空气阻力引起的减速在真空实验环境下是微不足道的,并且重力的影响在以几微秒的碎片云飞行过程中可以忽略,在碎片云的后续扩展阶段可近似认为碎片按照原轨迹飞行,并基本保持匀速直线运动。根据表2、表3和表4中提到的三组实验条件可知,前两组实验相邻两张实验图的时间间隔分别为5 μs,而第3组实验图像采样时间为4 μs,所以可以通过相邻两张图片中碎片飞行的位置差除以时间间隔,得到碎片的飞行速度,具体计算结果如图12所示。
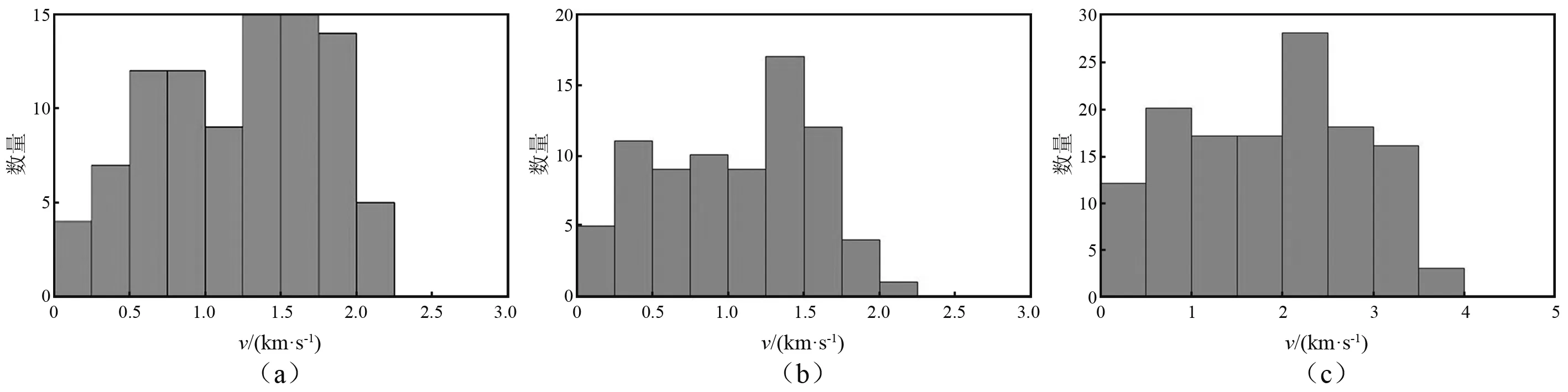
图12 碎片的速度分布Fig.12 Velocity distribution of fragments
图12分别展示的是三组试验的碎片速度分布图,图中横坐标表示不同的速度区间,纵坐标表示处在每个区间的二次碎片数量。图12(a)为实验1中碎片的速度分布情况,通过观察可以发现,实验1中计算得到的二次碎片速度均低于弹丸初始速度3.24 km/s,并且,速度处于1~2 km/s的碎片数量较多,达到总数的57.6%。与实验1相同,在实验2的碎片速度分布(见图12(b)),所有二次碎片速度低于弹丸初始速度3.06 km/s,处于1~2 km/s的碎片数量较多,达到碎片总数的58.1%。而对于实验3,弹丸的初始速度较实验1和实验2有所增加(见图12(c)),二次碎片速度均低于弹丸初始速度5.18 km/s, 速度处于约2 km/s的碎片数量较多,达到总数的56.3%。
3.2 碎片的飞行角度分布
首先,定义碎片的飞行角为碎片的位移向量与y轴正方向之间的夹角α,如图13所示。
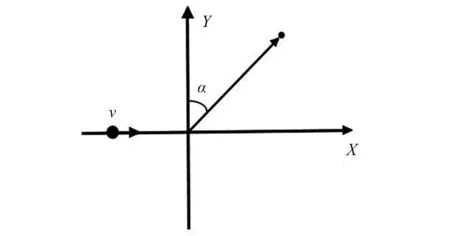
图13 碎片飞行角度的定义Fig.13 Definition of leap angles of fragment
接着,根据2.2.2节中获得的两张图片中相同碎片的位置信息,就可以分别计算得到三组实验碎片的飞行角度分布,具体结果如图14所示。图14(a)、图14(b)和图14(c)分别为实验1、实验2和实验3对应的碎片角度分布图。实验1和实验2由于初始条件相同,所以碎片飞行角度分布情况也基本一致。相比于实验1和实验2,实验3的角度分布图14(c)中碎片数量较多,分布也较为分散。同时观察三组实验的角度分析图,可以发现,实验1中碎片的飞行角度在70°~100°占总数的63.4%,而实验2和实验3中在此区间内的碎片数量分别占总数的67.5%和46.9%,也就是说三组实验中大多数碎片以近似正面撞击后板,对后板的中心区域造成较多的损伤。从图5的后板实际损伤图也可知,中心区域的损伤较为严重,这与分析结果相吻合。

图14 碎片的飞行角度分布Fig.14 Distribution of leap angle of fragments
3.3 获取二次碎片云相关运动特性
通过两张相邻帧碎片云图像建立碎片云的运动特性,可以有效的分析整个碎片云的形成过程,能更好的加深对碎片云的理解。
假设碎片云在后续扩展阶段,可近似认为碎片按照原轨迹飞行,利用2.2节中获得的三组实验相邻两帧碎片云图像中相同碎片的位置信息,可以分别计算得到每个实验中的碎片运动线性轨迹方程。通过上述计算得到的三组碎片运动轨迹模型结果,如图15所示。与此同时,分别对图5中三组实验中损伤坑的位置进行测量,将测量得到的真实数据与碎片轨迹方程预测数据进行对比。为了统一坐标系,这里只取损伤坑的垂直坐标,并在图15中,用黑色点进行标记。在图15中,当横坐标X=0时,为前板所在的位置,而X=80 mm时,为后板所在的位置,这样设计的目的是为了模拟真实的二次碎片在前后板间完整运行轨迹。
对于实验1获得碎片轨迹图(见图15(a)),所有轨迹在X=0时,处于聚集状态,集中在约9 mm的范围内,由此可以推算出前板的穿孔孔径约为9 mm,这与在图4(a)所观察到的实际穿孔孔径大小基本吻合。另外,当轨迹在X=80 mm,也就是后板所在位置时,可以看到碎片到达后板时的坐标,同时可以预测碎片对后板的损伤范围。在图5(a)中,碎片造成的损伤坑在±65 mm内,这与图15(a)中碎片轨迹终点的分布情况一致。
实验2相对于实验1,弹丸直径和初速度略小,所对后板造成的损伤面积也略小于实验1。在图15(b)中,轨迹在X=0处预测的前板穿孔为8 mm,这与图4(b)中所观察到的情况一致。而在X=80 mm处,轨迹的预测损伤范围与图5(b)实际测量的损伤范围相一致,损伤半径约为53mm。
用相同的方法观察实验3的轨迹(见图15(c))可知,由于其匹配到的碎片数量较多,所以图中轨迹比实验1和实验2密集许多。其次,图中对前板穿孔预计大小为14 mm,这与图4(c)中实际穿孔大小基本一致。同时,对后板损伤的区域预测,与实际损伤区域范围也基本一致,约为±83 mm。
经过上述对比发现,使用本文提出的图像处理算法得到的碎片运动轨迹结果与真实超高速碰撞实验结果相吻合,充分说明了该算法的有效性。
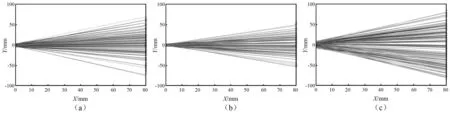
图15 碎片运动轨迹Fig.15 Trajectory of fragment
4 结 论
本文使用图像处理技术对二次碎片云进行运动特性分析并建立了一种新型碎片云处理模型。在图像处理技术方面,通过观察碎片云图像特点以及连续帧图像中碎片的运动变化特性,发现碎片运动时的翻转会对其图像特征提取产生干扰,提出了一种结合碎片云运动特性的二次特征提取算法。该方法通过碎片粗定位、特征定义及初匹配和碎片精确匹配三步策略,仅使用相邻的两帧图片就可以完成碎片的高效匹配及获取二次碎片云相关运动特性。之后,使用该方法对三组不同速度下的超高速碰撞时间进行分析,并对获得的数据分析碎片的速度、角度分布以及碎片的碰撞结果预测,与真实碰撞实验产生的结果进行对比,进一步验证了本文建立模型的有效性,该方法能便捷、高效地处理实验所获取的碎片云图片,可以与传统数值模拟结果进行对比,寻找其中的差异。
通过观察本文的图像处理算法对不同速度下的三组超高速撞击实验处理结果可知,目前对低速条件下的碎片云图像处理结果较为理想,而对较高速度下产生的密集内核碎片云部分处理结果较差,未来将对设备以及算法进行相应的修改与更新,提升处理的效果。
猜你喜欢
广东石油化工学院学报(2022年4期)2022-09-13
小学生必读(中年级版)(2021年12期)2021-12-02
电子制作(2018年19期)2018-11-14
金桥(2018年1期)2018-09-28
四川冶金(2018年1期)2018-09-25
自动化学报(2017年11期)2017-04-04
北京航空航天大学学报(2016年8期)2016-11-16
弹箭与制导学报(2015年1期)2015-03-11
噪声与振动控制(2015年4期)2015-01-01
电子设计工程(2014年6期)2014-02-27