
堤防堤顶路面车辙检测方法研究
2021-03-05 07:27薛增光刘念武常力夫姚艳茹
水利规划与设计 2021年2期
薛增光,刘念武,常力夫,题 晶,姚艳茹
(1.浙江理工大学 建筑工程学院,浙江 杭州 310000;2.北京崇理科技有限公司,北京 100081)
1 概述
长江、黄河流域洪涝灾害防治工程是水利工程的重中之重。堤防堤顶道路是水利工程的重要组成部分,不仅起到防洪防汛作用,而且是周边居民的主要通行方式,截止至2019年底我国堤防建设长度达到32.7万km。随着堤防堤顶道路的建成、通车、运营,在自然因素和交通荷载作用下,路面陆续出现各种损坏、变形、松散等病害问题,道路养护势在必行。道路检测作为养护的先决条件,其重要性愈加突出[1- 2]。
从路面破损现象分析,车辙作为最主要、最常见的道路病害被人们重点关注。车辙是车辆通行产生的轮迹带在自然环境综合影响下道路产生的变形病害,路面车辙深度直接影响了车辆行驶的舒适度以及路面的安全性和使用年限[3- 5]。
传统的路面车辙检测方式有如下缺陷:①取样间隔过大,可能出现误差;②主要针对测点处的车辙深度,对于车辙横截面信息无法描述;③人工检测过程需要封闭道路,影响正常交通,效率低下、存在较大人工误差且安全性无法保障。随着技术的进步,车辙检测方式已经从早期的人工检测发展到了现在的机器自动化检测,现有的检测技术及检测方式见表1[6- 9]。
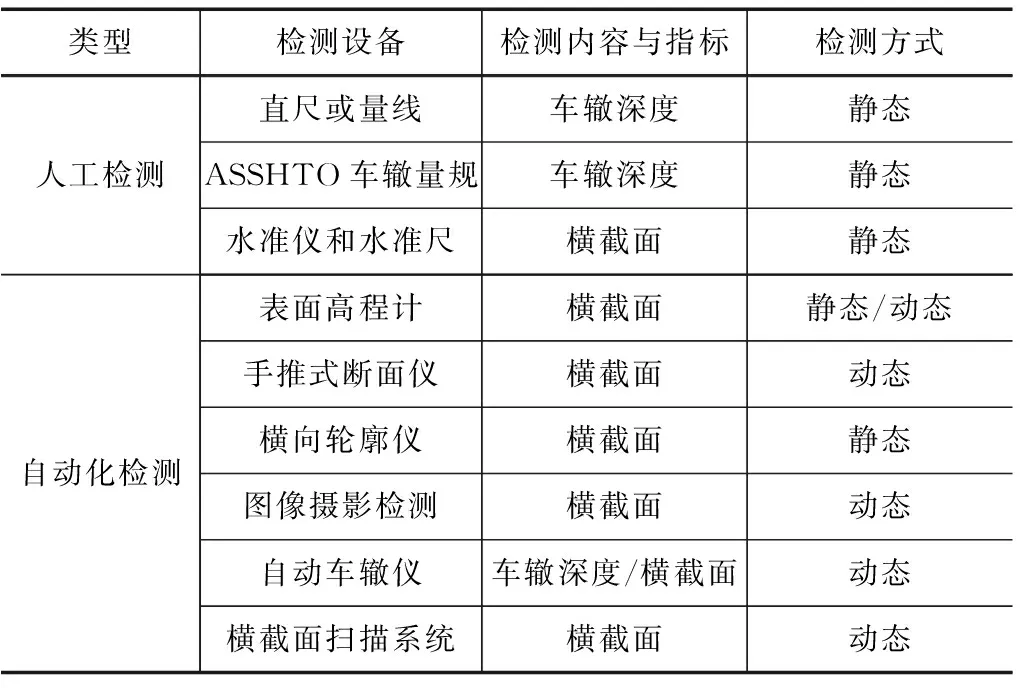
表1 常用路面车辙检测设备
随着计算机技术和图像处理技术的发展,在人工检测的基础上,开发出了多功能路面信息采集设备车,即在检测车上利用不同的路面信息采集设备获取道路信息。在车辙检测方面主要使用红外激光传感器或者声波测距来检测路面的横截面信息,很大程度上提高了检测效率[10]。声波检测系统针对车辙深度利用超声波反射传播时间得到车辙深度信息,缺陷在于测量间隔大,容易受到外界道路杂物影响[11]。激光检测系统利用点激光扫描直接测距或者线激光扫描路面激光条纹变化信息能够快速获取目标物体的三维空间信息,实现无损接触测量[12- 18]。马贵荣等[19]提出一种融合GPS和横截面车辙数据的三维重构模型,能够直观的展示道路车辙及部分坑槽检测数据。曹霆等[20]利用三维激光点云扫描技术获取路面信息,通过动态阈值特征值法拟合,能够有效的获得坑槽深度信息。吴付峰等[21]提出一种基于局部逼近法的车辙近似深度信息提取方法,其难点在于车辙峰值点的选取。以上研究在车辙深度和路面横截面信息提取方面取得一定成果,但在检测设备制造成本高和针对不同横截面信息提取方面仍有改进空间。
本文利用新型智能多维路面信息采集设备,采用结构光面扫描技术,能够快速、精确地采集路面信息。针对车辙病害,提出基于模拟直尺法的车辙深度提取方法,能够准确的提取不同轮廓的道路车辙横截面信息。
2 三维结构光检测技术
2.1 数据采集
基于激光结构光技术的智能多维路面信息采集设备来获取道路三维数据信息如图1所示。路面信息采集设备主要由两大模块构成:①路面三维数据信息采集模块,主要由面扫描结构光发射器和高清工业相机两个模块构成。面扫描结构光发射器和高清CCD(charge coupled device)相机布设在检测车后车顶,距地面布设高度1.8m,根据布设高度来调整角度以达到最佳效果。结构光发射器在道路上打出2.6m×4.2m(图1中标黄范围)的面扫描激光,通过CCD相机捕捉被测路面病害处光线条纹的变形,使用matlab软件进行数据解析获取被测路面的三维数据信息,并对数据进行相应处理进而获取路面病害信息。②辅助功能模块,主要由北斗定位系统和螺旋编码器两模块组成。螺旋编码器能够根据车速来控制相机的采集速度,在车速60Km/h下沿前进方向连续拍摄,获得涵盖行车道的路面车辙连续信息,如图2所示,并配合北斗定位系统准确定位病害位置,为后续养护方案实施提供巨大帮助。
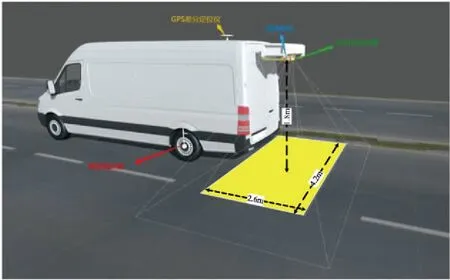
图1 基于激光结构光技术的智能多维路面信息采集设备
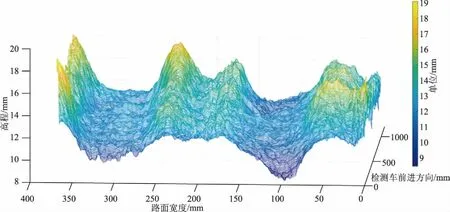
图2 路面连续车辙病害
2.2 数据处理
激光结构光三维数据采集系统是利用快速高精度三维无损面扫描技术,路面的破损类和变形类病害特征信息都能够从原始数据中提取。对采集到道路三维原始图像进行滤波等数据预处理,提取出3D高精度道路信息即路面变形类病害低频三维特征信息与破损类病害高频三维特征信息。将三维特征信息与二维图像相结合,获得含有深度信息的三维图像。
经过数据处理获得的路面三维数据图像如图3所示,图像每一点都含有其实际位置的三维坐标,如P1(497,298,12.404)和P2(498,114,11.676)为图像中任意一点,x值代表路面的宽度信息,y值代表检测车的前进方向,z值代表路面的深度信息。
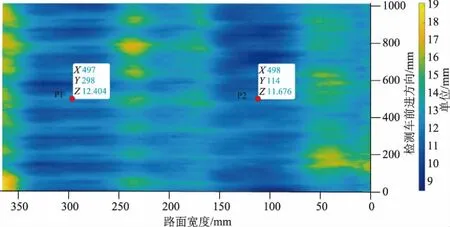
图3 车辙三维数据图像
3 车辙测量方法研究
依据JTG 3450—2019《公路路基路面现场测试规程》中路面车辙自动化测量规范,对路面横截面信息进行模拟3m直尺法,每10m采用一个统计值代表路面车辙深度(RD)。提出基于模拟3m直尺法的车辙深度信息提取方法,如图4- a所示,基于高精度的三维道路数据,沿检测车前进方向采用最小取样单位50mm选取连续车辙横截面。在图4- b中选取峰值点1-4,采用模拟直尺法,计算左右车辙最深点距离两峰点连线的距离RDL和RDR,取max(RDL,RDR)作为该横截面的车辙代表值RD,计算10m的平均车辙代表值(average(RD1,……,RD200)),能够更加准确地反应真实道路连续车辙信息。
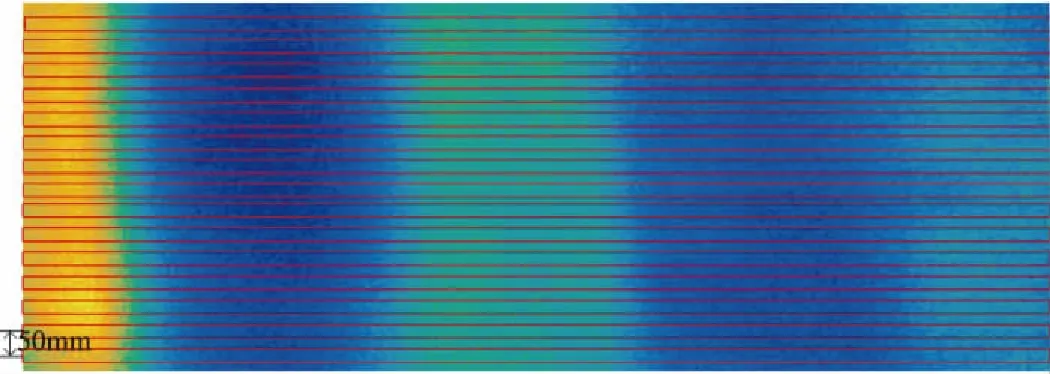
图4- a 车辙取样位置 最小取样间隔50mm
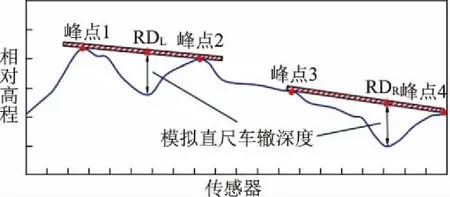
图4- b 模拟3m直尺车辙深度
为校准算法检测数据与实际车辙深度之间的误差,进行室外车辙模拟实验。如图5所示在实验场地路面上利用砂砾和碎石子搭建出不同形状的车辙,为了保障路面车辙信息的连续性和准确性,取样间隔为50mm,面扫描范围采用2.6m×4.2m为基本单元,对路面连续车辙信息进行拼接,采集到的数据利用matlab软件进行数据处理,连接峰值点构造直线计算车辙深度和横截面信息。车辙检测结果如图6所示,图6- a为部分的模拟车辙三维模型,可以直观判断路面的车辙的形状和起伏趋势;图6- b和6- c为图6- a中不同车辙长度处的车辙横截面图,可以看出算法针对不同横截面采用多段尺法,能够精准的提取车辙深度。

图5 室外车辙实验
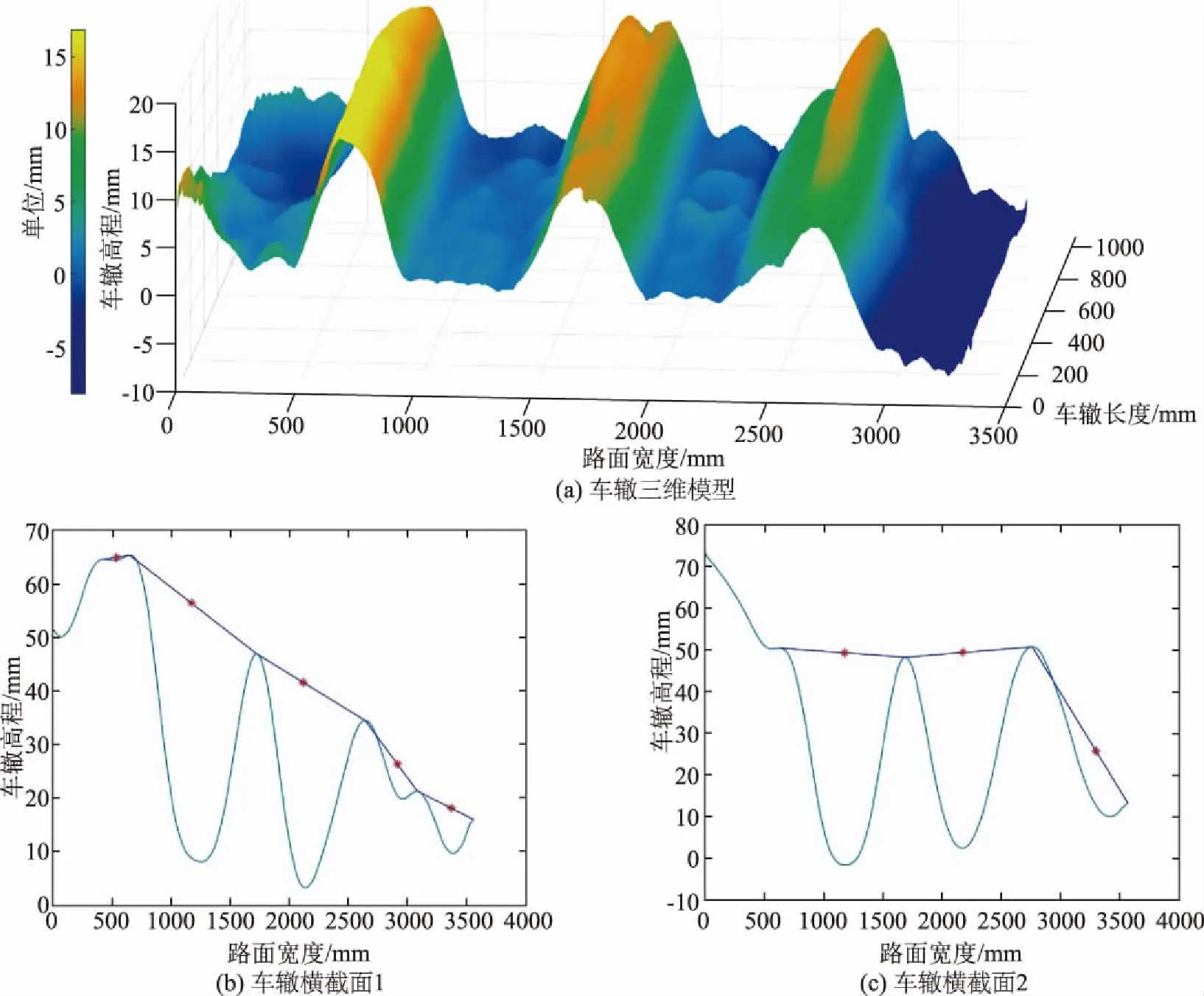
图6 车辙检测结果
室外车辙模拟实验部分车辙轮迹带3D检测车辙深度与人工检测对比图如图7所示,由图7可以看出车辙深度数据与实测数据趋势基本一致,平均差值2.41mm,误差为4.7%,能够较好的反映真实道路车辙信息。
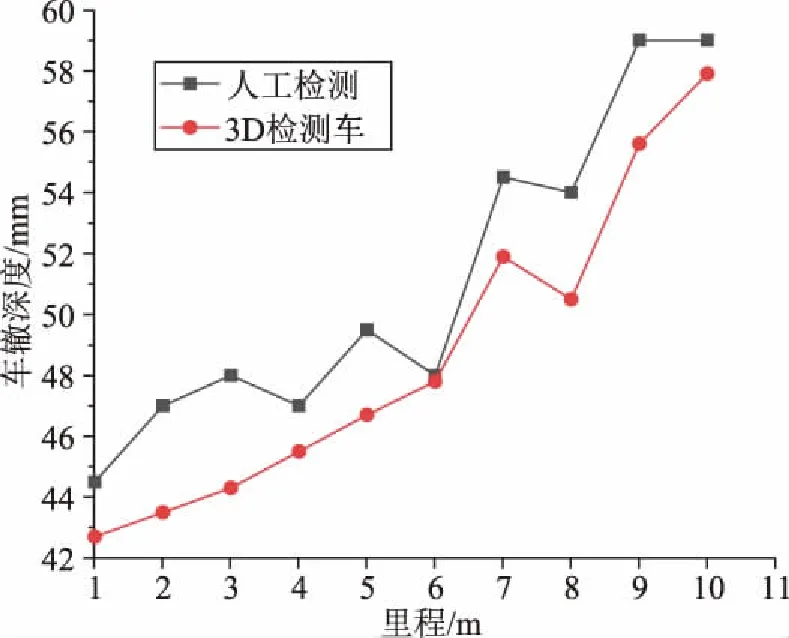
图7 人工检测与3D检测车辙深度对比图
4 结论
激光结构光面扫描技术能够获取丰富的路面三维信息,易于识别分析、识别准确率高、抗干扰能力强且检测设备搭建成本低,操作简便,在堤防堤顶公路车辙检测中有良好应用,符合国家的新型道路检测标准,拥有良好的应用前景。针对高精度的连续横截面信息,本文提出的车辙深度计算方式针对不同车辙形状均有良好表现,该道路车辙病害检测方式能够很好地适用工程检测,为堤顶沥青混凝土路面的预养护方案设计提供了坚实的数据基础。由于在自动检测过程中部分V型起伏等干扰因素,后期需要对数据进行筛选,后续会对峰值点选取算法进一步改进优化,以达到更精准的车辙定位效果。
猜你喜欢
今日农业(2022年3期)2022-06-05
趣味(作文与阅读)(2021年9期)2022-01-19
今日农业(2021年8期)2021-11-28
烟台果树(2021年2期)2021-07-21
今日农业(2020年19期)2020-11-06
山东交通科技(2020年1期)2020-07-24
北方交通(2020年4期)2020-06-01
疯狂英语·新悦读(2019年11期)2019-12-18
北方交通(2016年12期)2017-01-15
专用汽车(2015年4期)2015-03-01
