
食品拾放的3-PUU并联机器人轨迹规划
2021-03-05 04:37郭俊王新
食品工业 2021年2期
郭俊,王新*
1. 内蒙古机电职业技术学院机电工程系(呼和浩特 010070);2. 内蒙古农业大学职业技术学院车辆工程技术系(包头 014109)
随着工业的快速发展,机器人应用越来越广泛,特别是食品、医药等轻工业行业[1-2],机器人能够平稳高效地运动离不开有效的轨迹规划。有效的轨迹规划使机器人各部件能够平稳运动,如果各部件之间运动不平稳,各部件之间会存在摩擦和损伤,不仅使机器人的运动性能下降,而且会影响机器人的使用寿命。随着机器人的不断发展,对机器人轨迹规划的探索也在不断进行。Zhang等[3]以修正正弦运动规律为基础,在给定路径下对Delta机器人作了轨迹规划。Chen等[4]以笛卡尔空间为理论基础,对Delta机器人进行l轨迹规划,并得到运动控制算法。梅江平等[5]以B样条运动规律为基础对机器人进行轨迹规划,降低机器人振动,并减少电机功耗。李云辉[6]以修正梯形加速度为理论基础,对机器人进行轨迹规划,机器人的运动平稳性明显提高。因此,主要针对3-PUU并联机器人在食品拾放高速作业时的运动不平的问题,对机器人的运动轨迹进行轨迹规划,运用ADAMS和MATLAB联合仿真的方式,验证优化后运动轨迹能够提高机器人的运动平稳性。
1 3-PUU型并联机器人基本结构
3-PUU并联机器人主要由动平台、静平台、虎克铰和3个滑台铰链组成[7-8]。其结构模型如图1所示,铰链上装有驱动滑块和电动缸,铰链一端固定在静平台上,另一端通过虎克铰与动平台连接。3个铰链均匀分布于静平台上,且与静平台呈一固定角度。它具有3个自由度。通过改变滑块的位置,可以实现末端执行器的运动。

图1 3-PUU机器人结构模型
2 机器人的轨迹规划
3-PUU并联机器人用在食品行业,主要完成拾放动作,而拾放动作的运动轨迹一般采用门字形运动轨迹,门字形运动轨迹的竖直段与水平段之间的连接位置是直角,机器人在此位置时速度和加速度会因运动方向改变而突变,从而产生比较大的惯性力,会使机构产生较大的振动和冲击[9-10]。因此,需要将直角变为过渡曲线衔接竖直段和水平段,使其平滑过渡;另外,由于并联机器人高速的拾放动作易引起机构的冲击和振动,合适的运动规律可以有效减小这种冲击和振动,所以需要从合适的过渡曲线及合适的运动规律2个方面对机器人的运动轨迹进行规划,从而保证机器人具有良好的运动性能特性,能够高速平稳运行。
2.1 机器人运动轨迹设计
一般并联机器人的门字形轨迹的竖直和水平过渡部分会采用圆弧曲线过渡,一般圆弧与直线轨迹切换时会存在加速度突变,从而会影响机器人的平稳运动,采用回旋线-圆曲线-回旋线的过渡形式,实现加速度的连续变化。其轨迹设计如图2所示,整个运动轨迹分为9段,并且关于Z轴对称,AB和IJ为竖直运动段,设,BC和HI为变化率是α12的回旋线,设,CD和HG是半径为R的圆弧运动段,设,DE和FG是变化率为α22的回旋线,设EF为水平运动,长度为l4。

图2 运动轨迹设计图
2.2 机器人运动规律
因为3-PUU并联机器人在工作过程中具有较高的速度和加速度,所以存在较大的惯性负载和速度负载,为减小运动过程中的冲击,机器人在运动过程中需满足2个条件:1)在每段路经的起始点和终止点,末端执行器的速度和加速度都为零;2)在轨迹的中间点,末端执行器的速度和加速度曲线要连续可导。
一般电机的加速度曲线都采用梯形加速度曲线,速度达到较高时,其加速度会具有尖锐突变,所以继续加速度曲线拐点处需要增加过渡曲线,一般过渡曲线多采用多项式和正弦修正2种方式,这2种方式的效果基本相同,采用正弦修正的方式,修正后的梯形加速度函数如式(1)所示。

式中:T为机器人走完一段运动轨迹所用的时间,单位为s;αmax为运动过程中加速度的最大值,单位为mm/s2。
对式(1)两边两次积分可以得到位移函数。
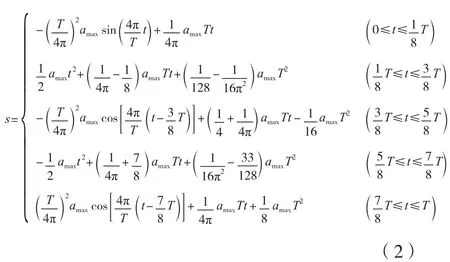
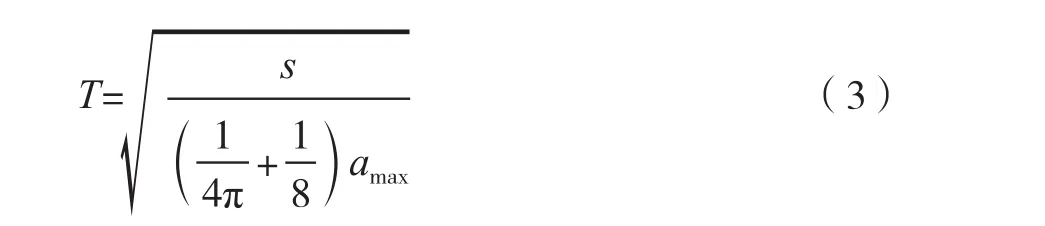
设给定位移为S,允许的最大加速度为αmax,所以机器人的运行周期为式(3)。
2.3 运动轨迹优化
3-PUU并联机器人在食品生产线上需要高速拾放目标物,这就要求其运行周期尽量短,所以基于运行周期最短的原则[11-12],对机器人的门字形运动轨迹参数进行优化。由式(3)可知,要使机器人的运行周期最短,在已知最大允许加速度前提下,需要位移S具有最小值,也就是门字形运动轨迹的路径最短。由图2可以得到如式(4)目标函数。

蚁群算法是一种可以用来寻找最优路径的概率型算法[13],其具有较强的鲁棒性,且较容易收敛,可以较快地得到目标值。其计算流程图如图3所示。

图3 蚁群算法流程图
以被广泛认可的美国Adept公司的标准门字形运动轨迹为例,确定算法的数学条件,如式(5)所示。

在MATLAB中采用蚁群算法,按上述数学条件编程,运行得到基于时间最短的个参数数值,为式(6)。
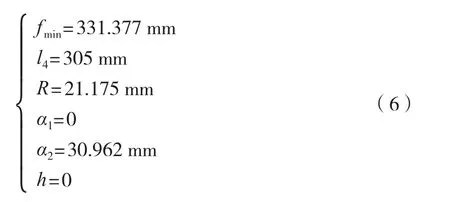
利用此方法,可对不高度和长度的门字形轨迹基于时间最短原则进行优化,并得到各个参数的数值。
根据分析计算,得到机器人优化后的运动轨迹,如图4所示,它由3段轨迹路径组成。
各段路径长度为s1=s3=55.897 mm,s2=219.583 mm。根据修正梯形加速度运动规律得到各段的运动时间,为
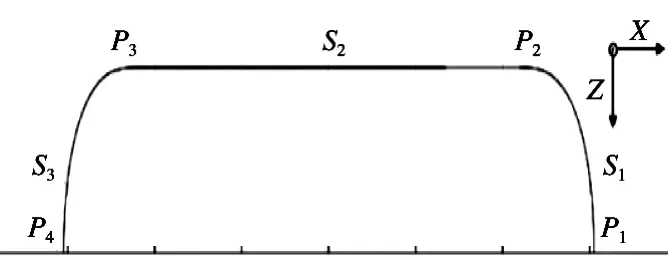
图4 优化后的门字形轨迹
3 ADAMS和MATLAB联合仿真
因为在ADAMS中对机械系统进行仿真不需要复杂的推导过程和大量的方程[14-15],所以可通过ADAMS和MATLAB进行数据交换,将MATLAB中设计的控制系统接入ADAMS中对模型进行控制仿真,得到模型的仿真结果。其具体步骤为:(1)将Solidworks中建立的模型存为通用格式导入ADAMS中;(2)分别以机器人的末端执行器和驱动滑块的位移、速度、加速度为控制变量,定义仿真的控制输入和输出,设定ADAMS和MATLAB的数据通信接口;(3)根据生成的虚拟样机模型的Simulink模块搭建仿真平台,如图5所示。
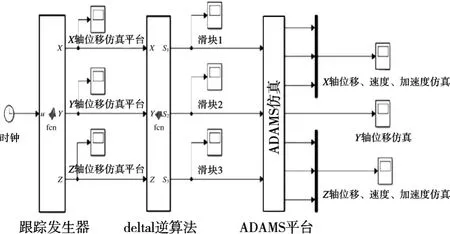
图5 联合仿真平台
分别以轨迹规划函数和半径20 mm的圆弧过渡门字形轨迹为仿真模型的输入,在MATLAB中完成轨迹函数仿真,输入到ADAMS中完成整个模型的轨迹仿真,通过ADAMS求解器得到轨迹优化后的机器人末端执行器的位移、速度及加速度仿真曲线,如图6所示。在圆弧过渡轨迹下的机器人末端执行器的位移、速度以及加速度仿真曲线如图7所示。
对比2种仿真结果可以看出,轨迹优化后机器人末端执行器的位移、速度及加速度曲线变化连续,能够平滑过渡,无突变,说明机器人运行平稳,无冲击产生;而圆弧过渡仿真,机器人末端执行器的位移和速度曲线能够连续变化,且光滑过渡,而加速度曲线虽然也连续变化,但是存在较明显的突变,且数值波动较大,说明机器人在运动过程存在较明显的抖动,运动性能不好。可以得到轨迹优化后的机器人运动更加平稳,运动过程中振动较小,说明优化后的门字形运动轨迹能够提高机器人运动的平稳性,从而可以减小机器人各个部件之间的摩擦和损伤,延长使用寿命。

图6 轨迹优化后的机器人末端执行器的位移、速度以及加速度仿真曲线
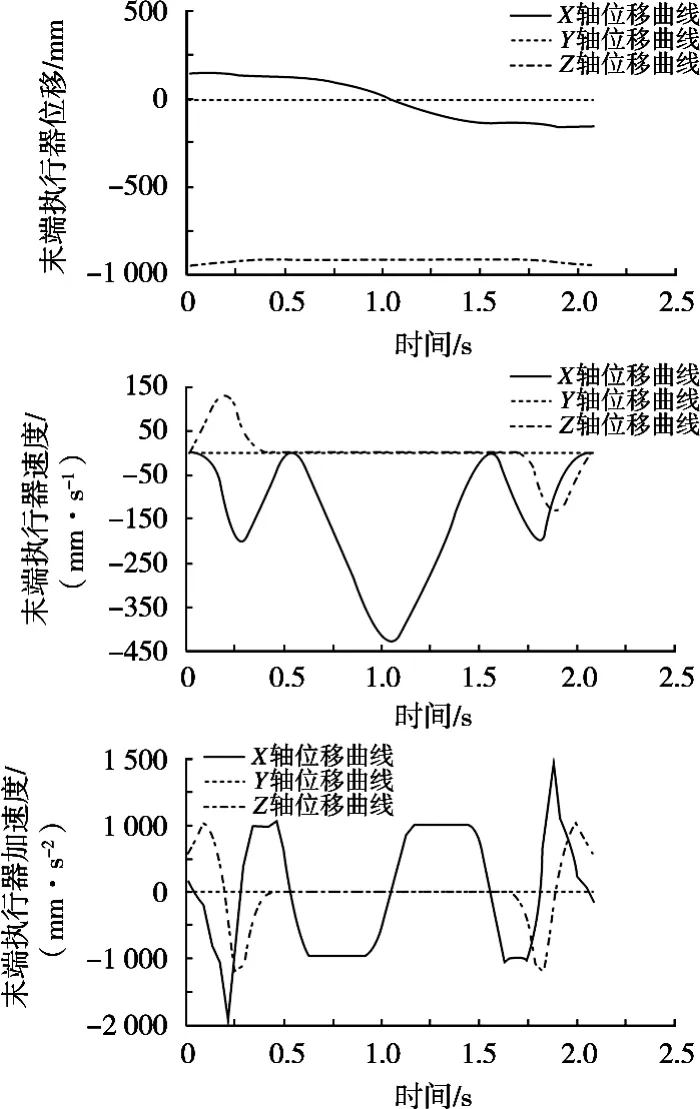
图7 圆弧过渡轨迹下的机器人末端执行器的位移、速度以及加速度仿真曲线
4 结论
采用回旋线和圆弧线组合的方式作为机器人运动轨迹中2段直线之间的过渡曲线,以修正梯形加速度运动规律为前提,以运动时间最优为目标,采用蚁群算法得到优化后的运动轨迹参数,ADAMS和MATLAB联合仿真得到优化后和以圆弧过渡曲线2种仿真结果,对比2种结果可得,轨迹优化后的机器人运动更加平稳,运动过程中振动较小。验证优化后运动轨迹能够提高机器人的运动平稳性,且会减小机器人各个部件之间的摩擦和损伤,为机器人的运动控制研究提供理论方法及依据。
猜你喜欢
建材发展导向(2022年4期)2022-03-16
科学技术创新(2020年6期)2020-04-18
三门峡职业技术学院学报(2019年4期)2019-05-20
汉字汉语研究(2019年4期)2019-03-04
测控技术(2018年12期)2018-11-25
小学生学习指导(低年级)(2018年5期)2018-04-24
制造技术与机床(2017年9期)2017-11-27
小学阅读指南·低年级版(2016年5期)2016-05-14
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
