
船用燃料电池混合供电系统仿真与分析
2021-03-10 13:31温小飞管慧敏孟文杰朱浩纲
中国航海 2021年1期
温小飞, 管慧敏, 孟文杰, 朱浩纲
(浙江海洋大学 船舶与海运学院,浙江 舟山 316022)
近年来,船舶混合供电系统逐渐向高效环保的混合供电系统发展,太阳能、风能和氢能等新能源在船舶上的应用成为热点[1-4],国内外学者对船用燃料电池进行大量研究。相比传统的柴油机,燃料电池能为船舶提供高效、低噪音和接近零污染排放的电力[5],其中质子交换膜燃料电池(Proton Exchange Membrane Fuel Cell,PEMFC)具有低温运行、体积质量小和模块化等优势,是目前最适合应用到船舶的燃料电池。[6]
单一的PEMFCs供电系统性能不稳定,动态调节能力较差,在船舶工况变化时无法瞬间提供较大电流,需增加辅助能源进行改善。PALADINI等[7]提出用功率密度高的超级电容作为燃料电池的辅助能源,可有效降低燃料电池的功率配额和功率波动,延缓燃料电池的衰减速率。另外,锂电池的能量密度高,作为辅助能源可迅速启动,补偿燃料电池伏安特性软并减少系统响应时间。[8]同时,锂电池与超级电容特性互补性很强,将2者耦合为辅助供能模块,兼备快速启动和降低燃料电池频繁波动的优势。因此,在PEMFCs系统的理论基础上,建立以PEMFCs 为主、锂电池和超级电容为辅的船用PEMFCs-B-UC系统,采用经典比例积分(Proportional Integral,PI)控制优化系统性能,并构建仿真模型分析PEMFCs-B-UC系统的性能。
1 PEMFCs系统
PEMFCs的工作原理是水电解的“逆”反应。PEMFC单体电池由阳极、阴极和质子交换膜组成,阳极是氢燃料发生氧化的场所,阴极是氧化剂还原的场所,2极都含有加速电极电化学反应的催化剂,H+由质子交换膜传递到阴极, H2失去的电子从外电路通过。PEMFC原理见图1。

图1 PEMFC原理
2极反应为
2H2→4H++4e-(阳极)
(1)
O2+4H++4e-→2H2O(阴极)
(2)
2H2+O2→2H2O(总)
(3)
PEMFCs由单体电池串联组成,燃料电池系统正常运行还需配备辅助子系统,见图2。PEMFCs系统由燃料电池处理器、水热管理器、PEMFCS和功率调节器组成。燃料处理器将碳氢燃料转化为H2,送入PEMFC阳极入口,若直接使用H2可省去[9],从而减少系统的复杂程度;质子交换膜的湿度和反应生成的水通过水热管理器处理,避免电池发生水淹现象,同时,将温度控制在电池工作温度范围内;功率调节器实现变压和交直流的转换,确保功率输出的稳定性。

图2 PEMFCs系统组成
2 PEMFCs-B-UC系统
船用混合供电系统一般是由2种以上动力源组成的系统,最常见的有柴-电混合、气-电混合和电-电混合等。柴-电混合供电系统即以柴油机发电为主,增加新能源作为辅助发电,目前,能够应用在船舶上的新能源主要有太阳能、风能和氢能;气-电混合供电系统是由天然气发电机与储能电池混合的系统,如天然气-蓄电池动力系统;电-电混合供电系统是利用储能电池、新能源等作为动力源为船舶提供电能,如燃料电池、锂电池和超级电容等。[10]
柴-电混合供电系统和气-电混合供电系统的发电方式均是先将化学能转化为热能,进而转化为机械能以驱动涡轮转动,最后产生电能。这种方式经过多次转化,会造成能量的损失,从而降低发电效率;燃料电池则可直接将化学能转化为电能,发电效率为40%~60%,若与其他能源联合供电,系统发电效率可达80%。[11]因此,PEMFCs-B-UC系统,见图3,其结合多源混合发电的优势,可提高系统能源的有效利用。
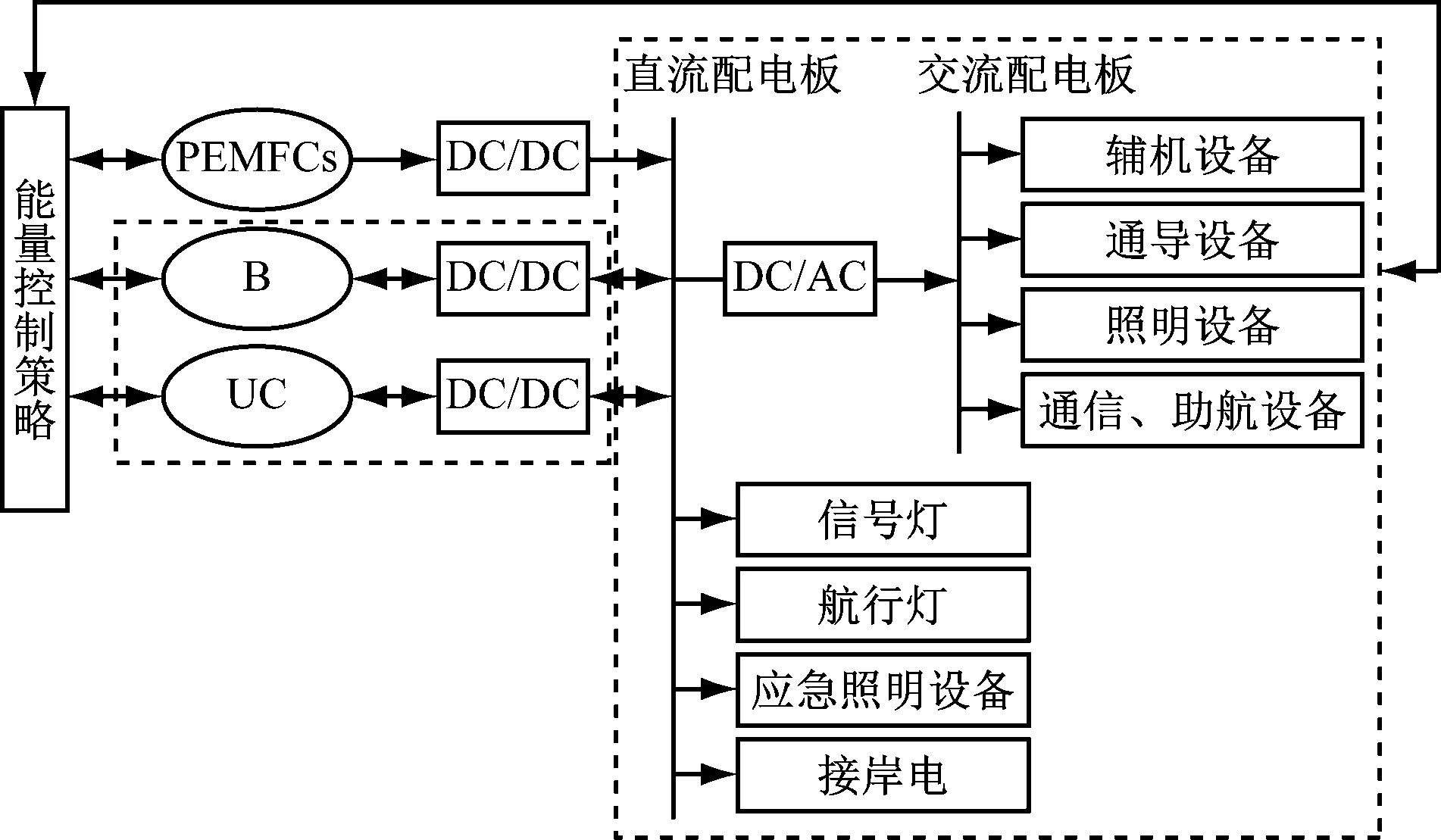
图3 PEMFCs-B-UC系统
PEMFCs-B-UC系统分为能源部分、负载部分和能量控制部分等3个部分。
1)能源部分由主动力源PEMFCs和锂电池、超级电容组成的辅助供能模块,以并联结构连接到直流配电板。
2)能量输出通过直流配电板和交流配电板转换成适用于船舶不同负载的电能,同时,多余能量还可被辅助供能模块回收存储再制动。
3)能量控制部分根据船舶不同的运行模式反馈给能量控制策略,经过能量控制策略的优化处理,系统能源部分做出响应,再对负载进行供电。
3 仿真模型
为进一步分析船用燃料电池混合供电系统性能的特性,根据上述PEMFCs-B-UC系统基本组成和作用,建立系统仿真模型,主要包括:建立PEMFC模型、辅助功能模块和船舶负载仿真模型,应用经典PI控制策略建立能量控制模型。
3.1 PEMFC模型
根据PEMFCs的原理,考虑到H2和空气的流量、组成等参数的变化会对其发电性能产生影响,采用通用型氢燃料电池堆模型。假设模型中输入的气体为理想气体,冷却系统保持阴极和阳极出口温度与电堆温度相同,水管理系统使电池内部的湿度保持恒定。模型忽略流道上的压降,电池电阻值恒定,其等效模型[12]见图4。

图4 PEMFC等效模型
PEMFC等效模型主要方程有
输出电压为
V=EOC-Vact-Vr
(4)
(5)
Vr=rohm×ifc
(6)
式(4)~式(6)中:EOC为开路电压;Vact为活化损耗电压;Vr为电阻和扩散损耗电压,V;A为塔菲尔斜率;i0为交换电流,A;Td为电流发生阶跃的设置时间,s;rohm为电池和扩散电阻,Ω。
当空气的压力、温度、组成和流量等参数发生变化时,会影响EOC、i0和A[13],有
EOC=KCEn
(7)
(8)
(9)
式(7)~式(9)中:R=8.314 5 J/molK;F=96 485 As/mol;z为移动电子数;En为能斯特电压即电池的热力学电压,V;α为电荷转移系数;PH2为电池堆内部H2的分压,Pa;PO2为电堆内部O2的分压,Pa;k为玻尔兹曼常数,值为1.38×10-23J/K;h为普朗克常数,值为6.626×10-34Js;Δv为活化势垒体积因数,m3;ΔG为活化势垒的大小,J/mol;T为电堆工作温度,K;Kc为在额定工作条件下的电压常数。
H2和O2的利用率为
(10)
式(10)中:Pfuel和Pair分别为燃料和空气的绝对供气压力,atm;Vlpm(fuel)和Vlpm(air)分别为燃料和空气的流量,l/min;x为燃料中H百分比;y为氧化剂中O2百分比;N为单电池数;常数60 000由1 liter/min=1/60 000 m3/s单位转换而得。
H2、O2和空气的分压和能斯特电压分别为
(11)
(12)
式(11)和式(12)中:PH2O为电堆内水蒸汽分压,atm;w为氧化剂中水蒸气的百分比;A可由制造商数据表中获得相关参数计算得出。
3.2 辅助供能模块模型
PEMFCs-B-UC系统要求锂电池在系统启动时能够快速响应,经典Thevenin模型相比于其他电池模型能较准确地描述电池的响应特性,其等效模型见图5。
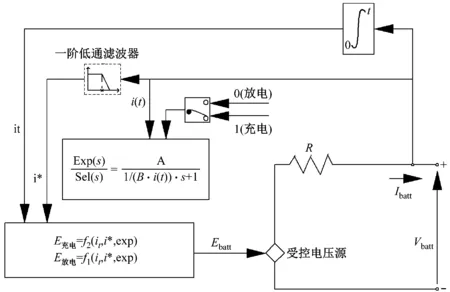
图5 锂电池等效模型
其充、放电的数学方程[14]为
1)放电模式(i*>0)
(13)
2)充电模式(i*<0)
(14)
式(13)和式(14)中:E0为恒定电压;K为极化常数;i*为低频动态电流;i为电池电流;it为电池可提取容量;Q为电池最大容量;A为指数电压;B为指数容量。
超级电容器等效模型基于Stern模型[15],该模型结合Helmholtz和Gouy-Chapman模型[16],不考虑老化效应和温度对电解质材料的影响,假设流过超级电容的电流是连续的,其等效模型见图6。

图6 超级电容模型的等效模型
其输出电压是由斯特恩方程为
(15)
(16)
式(15)和式(16)中:Nu为超级电容的串联数;NP为超级电容的并联数;QT为电荷数,C;d为分子半径;Ne为电极层数;ε为超级电容材料的介电常数;ε0为自由空间的介电常数;R为理想气体常数;T为工作温度,K;F为法拉第常数;c为摩尔浓度,mol/m3;Vuc、iuc和Ruc分别为超级电容的电压(V)、电流(A)和总电阻(ohms)。
3.3 船舶负载仿真模型
由于船舶负载中容性负载较少,因此,负载模型用三相并联RL负载表示。基于负载的本质特性是电阻、电感感抗和电容容抗的复合物,因此,采取等效动态阻抗的方法建立负载模型,见图7。

图7 负载模型
通常,负载功率采用拟合曲线和经验公式的近似表达式计算得到,拟合曲线从船舶功率需求曲线获取,近似表达式采用N变量采样函数为
y=F(x1,x2,x3,…,xN)
(17)
式(17)中:函数F为经验函数;xi为负载在i时刻功率需求,时间间隔的功率变化呈线性关系。
功率因数(Power Factor,PF)取决于负载的负荷性质,电阻负荷的功率因数为1,具有电感性负载的电路功率因数都小于1,PF衡量电力系统的电气设备效率的系统,数值上为有功功率与视在功率的比值。三相交流负载等效模型见图8。
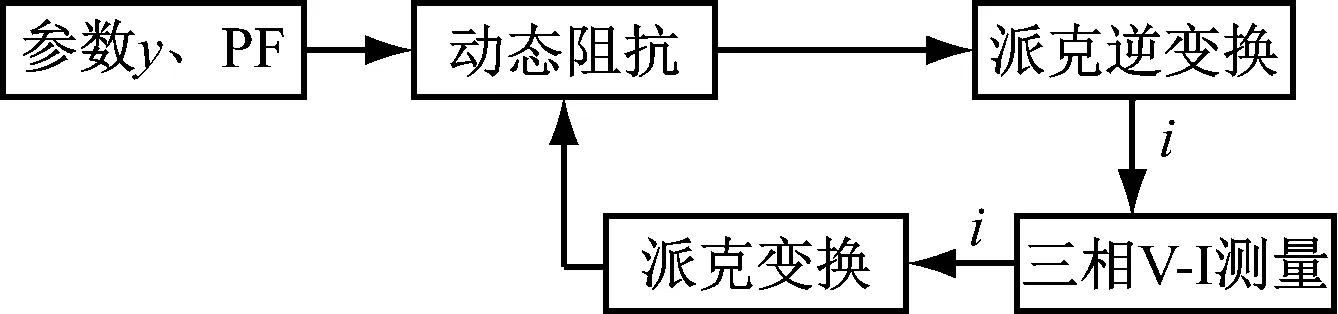
图8 三相交流负载等效模型
在三相交流负载中,将船舶负载消耗功率等效为动态阻抗Z消耗功率。负载功率、PF和动态阻抗关系式为
(18)
式(18)中:k为系统增益,是常量;δ为PF。当电流经过动态阻抗时,产生的功率等于船舶负载的功率消耗。
3.4 经典PI控制策略模型
PEMFCs-B-UC系统是一个多源混合供电系统,需要制定合理的能量控制策略。[17]经典PI控制策略采用PI控制器,对输入的参数进行偏差调整(见图9)。

图9 PI控制器原理
当输入参数为r(t),实际输出为c(t),则参数的偏差为
e(t)=r(t)-c(t)
(19)
将偏差的PI通过线性组合构成控制量,并对输入参数进行线性控制,则PI控制器的输出u(t)为
(20)
式(20)中:KP为比例系数;TI为积分时间常数。
经典PI控制策略通过对主要性能参数的偏差控制,如:电池电荷状态(State of Charge,SOC)、超级电容器电压或直流母线电压的控制,PI控制器很容易地在线整定以便更好地跟踪。因此,需要确定输入的控制参数和PI参数的设置,参数输入根据具体系统性能设置(见图10)。

图10 经典PI控制模型
4 仿真与分析
为验证PEMFCs-B-UC系统模型构建的合理性和控制策略的有效性,进行基本参数设置,并运用 MATLAB/Simulink的SPS工具箱搭建仿真方案。根据仿真结果输出的PEMFCs-B-UC系统参数变化曲线,进行船用燃料电池混合供电系统性能分析。
4.1 船型基本信息
船用燃料电池混合供电系统没有标准测试工况,因此,基于具有代表性的“Alsterwasser”号燃料电池混合动力船的功率需求参数设计规则。[18]选取小功率负载的沿海交通船作为母型船舶。[19]该船航行时间不超过4 h,最大航速约为10.5 n mile,续航力为300 n mile,其参数见表1。
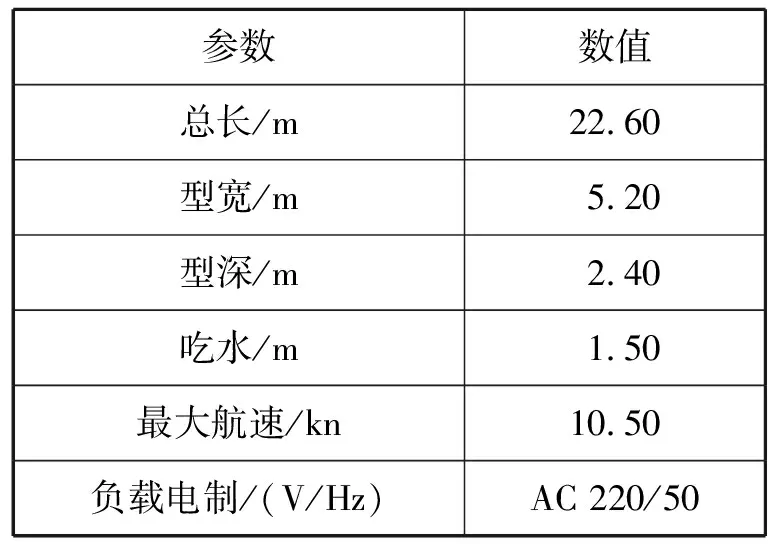
表1 沿海交通船参数
沿海交通船的典型工况包括航行状态、进出港状态、工作状态和停泊状态等,各工况下负载用电功率见表2。

表2 负载用电功率 kW
负载用电功率不作具体分析,仅考虑在不同工况下负载总功率消耗和PEMFCs-B-UC功率分配情况。仿真中涉及5种工况下负载功率需求。前20 s为船舶启动出港开始航行,需锂电池快速启动,补偿PEMFCs伏安特性软,减少系统响应时间。船舶正常运行后,工作状态和航行状态的切换使得负载用电功率需求波动大,超级电容需减弱功率频繁变化对PEMFCs的影响,功率需求曲线见图11。
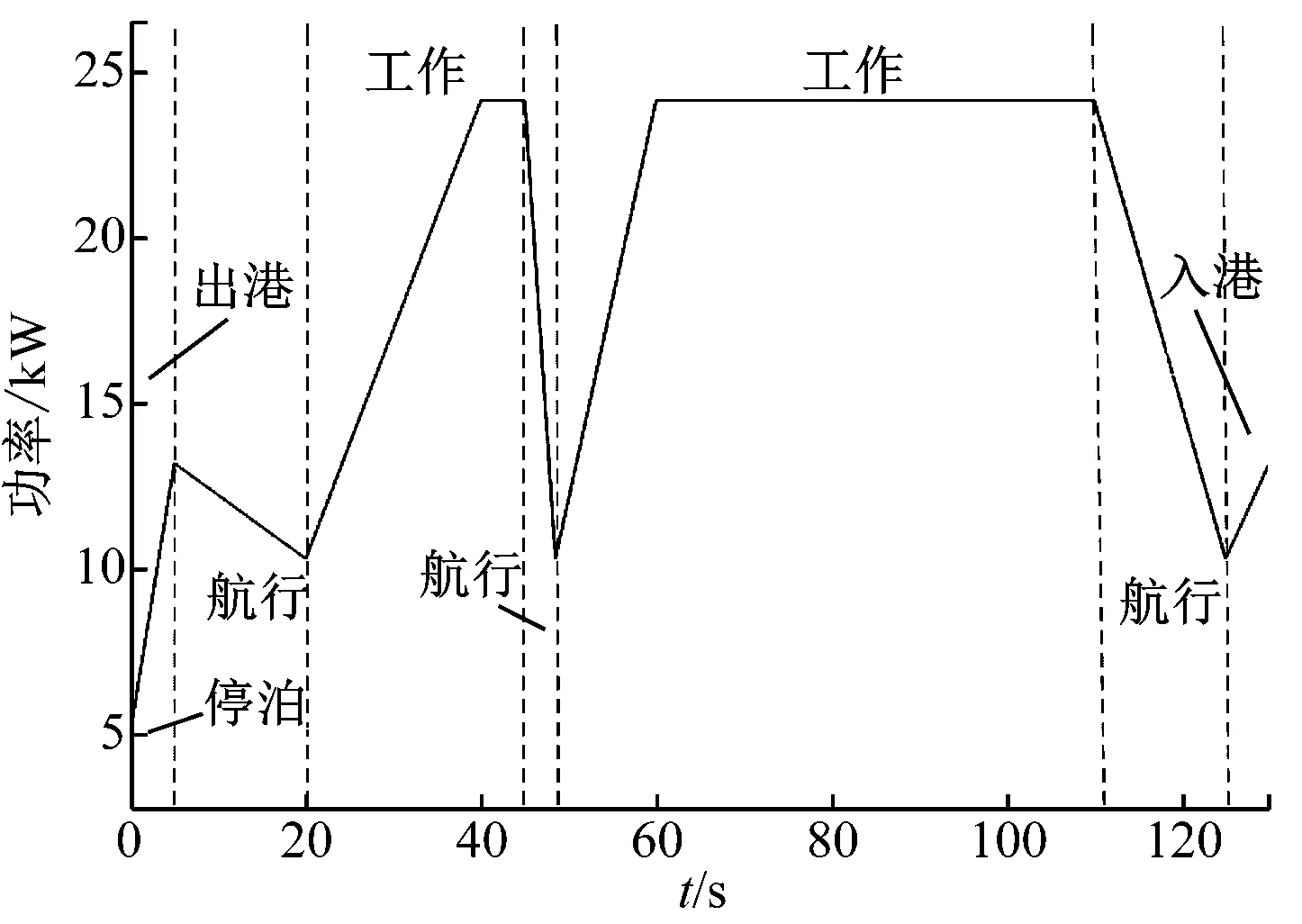
图11 功率需求曲线
4.2 基本参数设置
PEMFCs系统参数配置为一组25 kW的PEMFCs与30 kW的DC/DC变换器构成的PEMFCs发电系统,PEMFCs参数见表3。
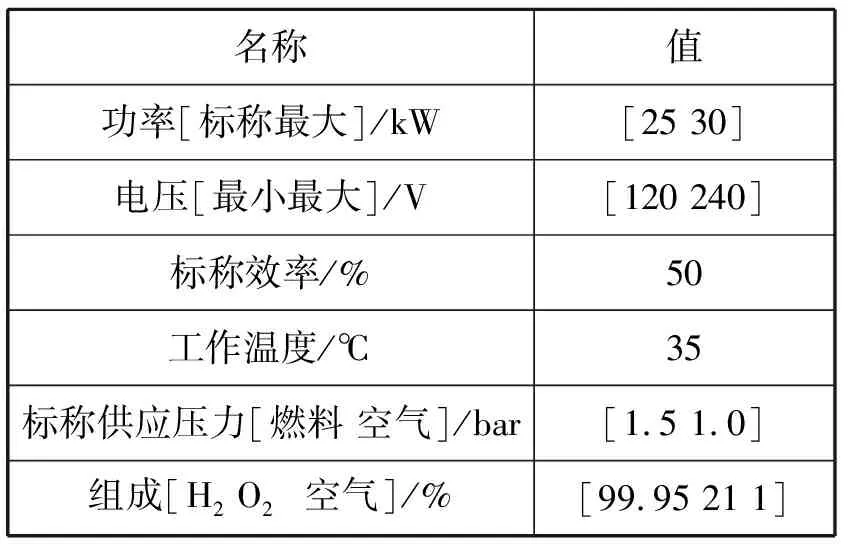
表3 PEMFCs参数
辅助功能模块系统配备了1个4.0 kW的升压变换器和1个1.2 kW降压变换器,直流母线电压为270 V,锂电池和超级电容的参数见表4。

表4 辅助供能模块参数
4.3 仿真方案
根据本文所建立仿真模型以及设置的基本参数设计系统仿真方案,搭建PEMFCs子系统、辅助供能模块子系统、负载子系统和控制策略子系统(见图12)。

图12 系统仿真方案
PEMFCs子系统中变化参量设置为H2流量和空气流量,锂电池和超级电容的辅助供能模块子系统中,考虑系统负荷过载问题,以锂电池的SOC和超级电容的输出电压Vdc的范围等2个参数作为条件限制系统负荷过载的发生,其限制规则见表5。
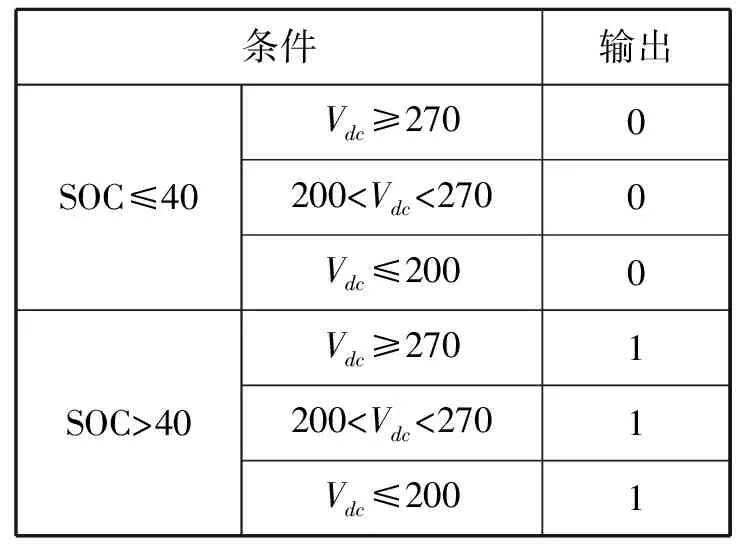
表5 限制规则
由表5所知:当输出为0时,系统发生过载或锂电池电荷低于最小值,系统无法正常运行;当输出为1时,系统正常运行。
负载子系统将船舶负载假设为电阻负载,则PF设为1,负载功率输入由船舶负载用电功率导入。在控制策略子系统中,控制参数的输入参量为:燃料电池电压、电流;锂电池电压、电流和SOC值;超级电容电压、电流;负载电压、电流。控制策略调整分配之后,仿真可得出PEMFCs-B-UC系统相关特性曲线。
4.4 结果分析
运行仿真方案得到PEMFCs的电压、电流、耗氢速率和耗氢量等参数曲线、锂电池的参数变化曲线和PEMFCs和超级电容的输出功率分别见图13~图16。
由H2消耗速率和PEMFCs输出电流的曲线比较可知:H2的消耗速率影响PEMFCs的电流输出。

a)PEMFCs电压

b)PEMFCs电流

d)燃料消耗量

a)锂电池电流
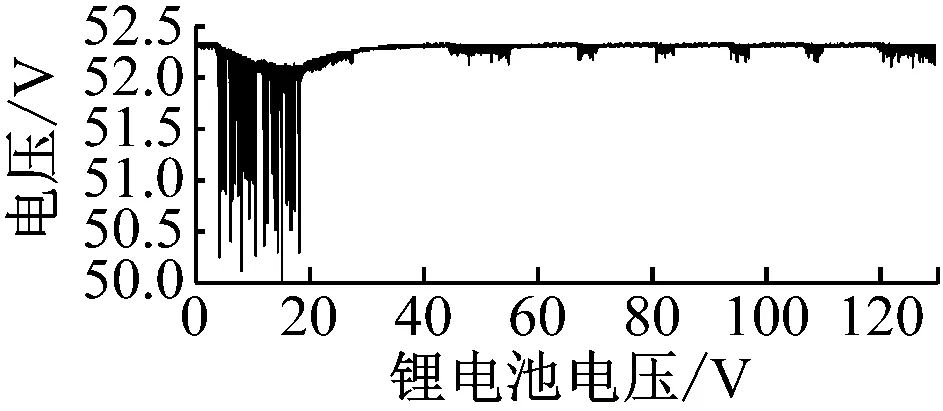
b)锂电池电压

c)SOC
c)SOC

图15 PEMFCs输出功率

图16 超级电容输出功率
成正比关系即H的消耗速率减慢时,电流输出也会随之减小,反之亦然。前40 s内,H2消耗速率较高,最大值为239.4 lpm,且电堆的电压、电流变化较大。在 40 s后,H2消耗速率达到稳定(均值约为100 lpm),PEMFCs输出电压、电流也达到稳定。
在锂电池响应时间内,船舶处于启动阶段,锂电池快速放电,提供较大电流,从而缓解PEMFCs启动慢的状况。同时,SOC值从65.00%到64.75%的变化范围较窄,延缓锂电池寿命的耗损。
由图15和图16可知:船舶启动开始航行时(即仿真前20 s),PEMFCs和超级电容共同承担负载消耗用电,占比约为1/2;PEMFCs功率处于稳定输出时,承担船舶全部负载用电消耗功率,同时,多余能量由超级电容储存;在船舶工况变化时(即船舶在工作、航行和入港之间的工况切换)超级电容迅速进行功率输出,避免PEMFCs功率频繁波动。
在负载消耗功率动态变化过程中,系统各能源能够有效稳定输出,缩短响应时间,减少部件寿命损耗,提高系统的经济性,验证PEMFCs-B-UC系统仿真方案的可行性。
5 结束语
PEMFCs-B-UC系统通过能量控制策略优化实现能源特性互补,提高系统混合供电效率,降低船舶电力系统突发故障机率,从而改善燃料电池作为单一动力在船舶应用中存在的不足。总体而言,PEMFCs-B-UC系统具有以下几个方面的特点和不足:
1)锂电池快速放电有效缩短船舶启动时间,锂电池响应时间较短使SOC值保持在较窄范围(在20 s内放电变化量为0.25%),从而避免锂电池的耗损。
2)超级电容的功率输入和输出波动频繁(在130 s内充、放电循环6次),增加系统的动态调节能力,多余能量进行回收再利用,提高系统经济性。
3)系统模型中假设H2和空气均为理想气体,PEMFCs的输出功率仅受燃料速率的限制。在实际应用中,可在此基础上将H2、空气成分占比作为变量,能进一步完善本文所述混合供电系统的发电性能。
猜你喜欢
中学生数理化(高中版.高二数学)(2020年2期)2020-04-21
车迷(2017年12期)2018-01-18
电子制作(2017年10期)2017-04-18
电源技术(2016年2期)2016-02-27
电源技术(2015年1期)2015-08-22
电源技术(2015年7期)2015-08-22
电源技术(2015年7期)2015-08-22
河南科技(2014年12期)2014-02-27
汽车与新动力(2014年4期)2014-02-27
储能科学与技术(2014年5期)2014-02-27
