基于人工智能技术的客运分流引导机器人的研究
2021-03-16 04:01万鑫兴姚自魁韩立刚芮立全
中国新技术新产品 2021年24期
万鑫兴 姚自魁 韩立刚 芮立全
(中国铁路兰州局集团公司银川车站,宁夏 银川 750011)
1 客运分流引导机器人需求分析
随着社会经济的快速发展,人工智能技术广泛应用于各个领域,各种类型的机器人也应运而生,例如观赏型机器人、体力劳动型机器人以及服务型机器人,它们的出现为客运分流引导机器人的研发提供了参考思路[1-3]。客运分流引导机器人必须满足客运服务的需求:首先,要能解答旅客提出的旅行问题。 其次,要具备自主导航功能,在旅客需要引导帮助时,将旅客引导至目的地。 最后,要对客票和身份进行识别,以便为旅客提供更加温馨的服务。同时,客运分流引导机器人还需要具备动态测温的防疫功能。
1.1 语言交流服务
语音交流是重要的客运服务方式,即通过语音广播传达旅客最需要了解的旅行信息。车站候车室通常采用广播对距离当前时间最近的出发列车的车次、检票口以及站台等信息进行重复播报。但是这种语音交流方式存在很大的局限性:1) 重复播报的时间是固定且有限的,因为需要重复播报的列车数量较多,所以只有在固定的时间段旅客才能听到对应的乘车信息。2) 与旅客语音交流的效率很低,因为长时间的重复广播容易让旅客的听觉处于疲惫状态,所以很容易忽略对自己旅行有效的语音信息。而旅客主动询问客运员是语音交流中效率较高的一种方式,但也存在一些问题:1) 客运员数量有限,不能及时回复所有问题。2) 因为客运员精神状态和服务水平存在差异,所以这种客运服务会因人为因素而存在稳定性较差的缺陷。
综上所述,客运分流引导机器人需要具备以下功能:1) 要具备识别旅客提出的旅行问题的基本功能。2) 要准确地将旅行问题的答案反馈给旅客。3) 要具备内容丰富的语音识别问题库和回答问题答案库。
1.2 自主建图导航服务
车站候车室客运员在部分弱势群体询问一些旅行问题(例如在哪里退票、如何找到自己乘车的检票口以及去哪里寻找卫生间等问题)时,可能需要将旅客引导送至目的地,但由于客运员数量不足和不同客运员的服务耐心、水平不同等因素,因此,容易降低客运服务质量。
综上所述,客运分流引导机器人需要在识别旅客旅行问题的基础上,具备将旅客引导至目的地的功能,即具备自主建图导航的功能。同时,还需要在运动过程中主动避开障碍物,例如其他旅客、候车室座位等。
1.3 客票识别及动态测温功能
为了可以方便、快速且准确地解答旅客的问题,客运分流引导机器人必须有选择性地为弱势群体提供更细心、更周到的引导服务,这就需要通过客票识别和筛选旅客年龄来提供相应的服务。
同时,客运分流引导机器人在闲暇时,能够不间断地在候车室的候车椅子间巡航测温,巡航期间在与旅客交流的同时进行动态测温,如果发现体温高于正常温度的旅客,则发出报警通知防疫人员。
2 机器人设计理念和思路
设计客运分流引导机器人的目的如下:1) 将客运员从重复枯燥的客运服务工作中解放出来,节约客运组织与管理的成本。2) 通过稳定成熟的机器系统给旅客提供更高水平的客运服务。3) 为旅客提供更智能、更美好的旅行体验。
机器人外观设计必须具有铁路文化特色,同时,尽可能地简化其结构,使机器人实用且新颖。例如客运分流引导机器人在面对不同身高的旅客时,可以自动调节自己的身高;在面对小孩询问时,回答声音模仿小孩子的声音。机器人的结构设计应能够满足机器人安装所有零配件的需求,以实现机器人的所有功能。机器人结构设计如图1 所示。
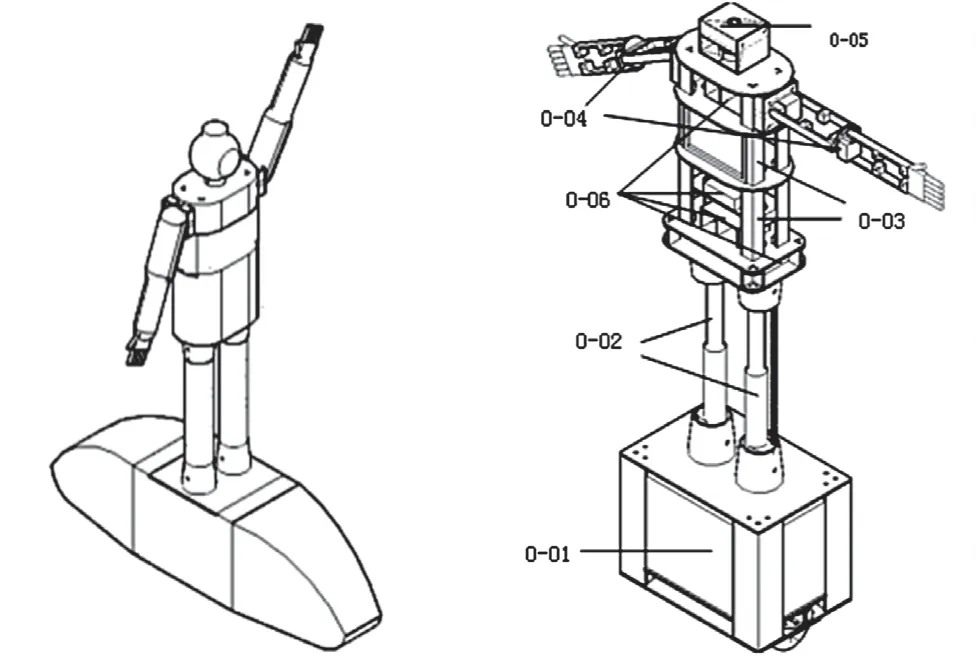
图1 机器人结构设计图
3 机器人各种功能的实现
根据设计机器人的思路,客运分流引导机器人必须要满足其工作的硬件设备条件和软件控制条件。机器人硬件设备在软件控制下协调动作,获取周围环境信息(主要包括候车室位置信息、旅客语音信息和机器人周边障碍物信息等),从而智能地做出决策,为旅客提供高质量的客运服务。
3.1 机器人硬件设备功能的实现
3.1.1 走行车的组成及功能
机器人走行车包括走行轮、走行轮固定支座、底层走行板、走行板中心连接架、中层走行板、双层走行架、上层走行板、电源箱、电源、充电接触桩、变压模块、走行车螺丝连接孔、万向轮以及走线孔,机器人走行车结构示意图如图2 所示。不同于市场上的其他机器人设计结构,因为客运分流引导机器人要长时间、不间断地工作,对电源储电量的要求是其他机器人的几倍,其体积和质量也是其他机器人的几倍,所以机器人走行车的质量约占机器人总质量的90%,这样就极大地降低了机器人整体的重心,使机器人很难被推倒,更加适合在人多的候车室工作。
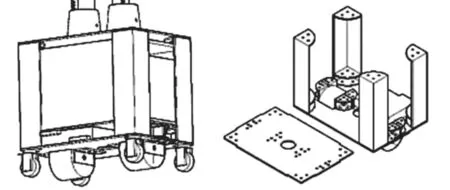
图2 机器人走行车结构设计图
首先,走行车可以辅助机器人向前、后、左以及右平稳地运行,通过2 个带编码器的伺服轮对和4 个万向轮承载整个机器人的质量,并通过它们实现精准运动的功能。其次,走行车主要用于承载电源的质量。最后,走行车上的自动充电装置能够自行为机器人充电。
3.1.2 伸缩双腿的组成及功能
机器人双腿包括机器人双腿固定底座、机器人伸缩固定架、机器人伸缩杆、伸缩步进电机、电机驱动、机器人伸缩双腿、弹簧线路管以及机器人双腿固定顶座,如图3 所示。机器人双腿能够上下伸缩,以实现改变机器人身高的功能。其工作原理为在电机驱动的控制下,伸缩步进电机转动的同时带动齿轮组转动,丝杠带动齿轮组转动,最终带动机器人伸缩杆上下运动,使机器人双腿变长或者变短。
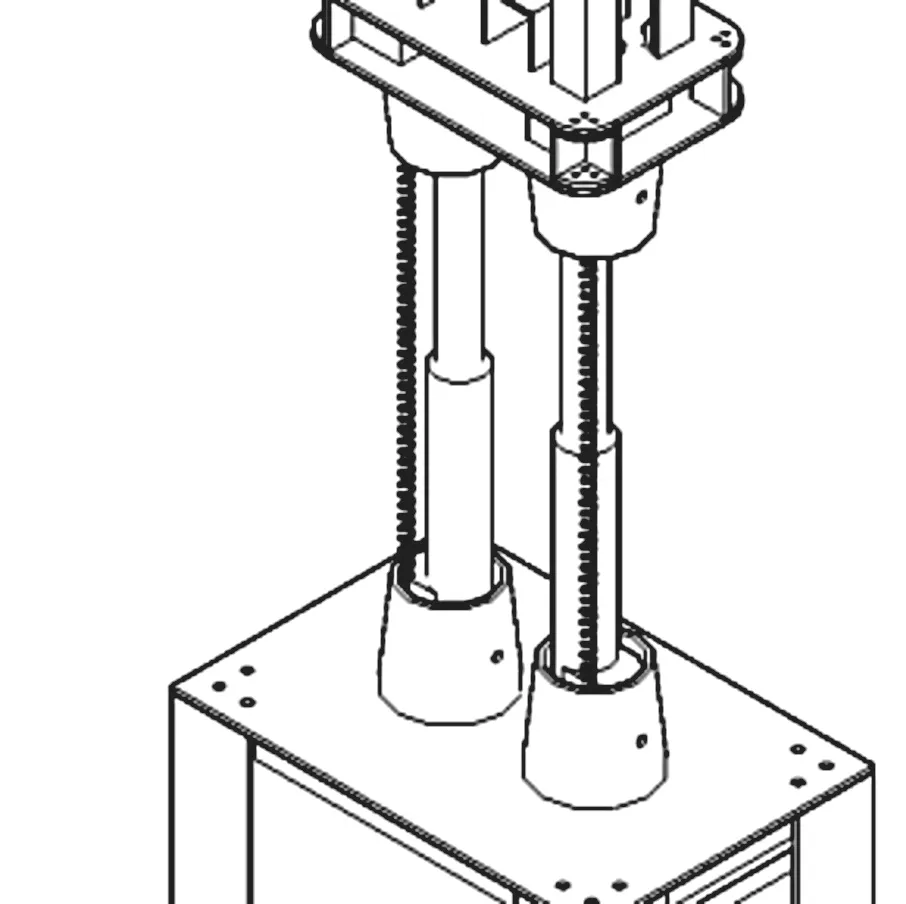
图3 机器人伸缩双腿结构设计图
3.1.3 躯体及头部的组成和功能
机器人躯体包括躯体固定板、固定板连接架、躯体底板、底板连接架、躯体小隔板、屏幕固定底板、固定底板连接架、屏幕固定顶板、顶板连接架、躯体顶板、手触操作屏、语音模块固定板、语音模块、躯体走线孔以及躯体螺丝连接孔,如图4 所示。机器人躯体一方面是为了维持机器人外在的人型形象,另一方面是为了安装机器人控制软件赖以工作的各种芯片,并利用机器人躯体保护它们。在机器人躯体安装了控制机器人全身协调运动的核心控制板、机器人运动的驱动板、机器人的语音识别板、机器人语音转换板、激光雷达转化板以及手触操作屏等用于协调控制机器人运动的设备。
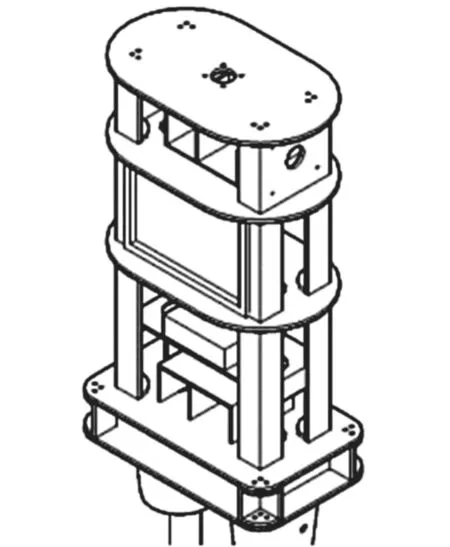
图4 机器人躯体结构设计图
机器人头部包括脖颈、头部支架、直角固定板、面部屏幕、激光雷达安装座、语音喇叭安装座、激光雷达模块、语音喇叭以及远距离测温模块,如图5 所示。在机器人头部安装了面部屏幕,当语音喇叭发出语音工作时,可以显示机器人配套的面部表情,使机器人更加生动、形象。机器人头部的激光雷达模块是机器人SLAM 自主建图导航的核心部件,同时也可以用来避开障碍物。远距离测温模块主要在机器人自主巡航时对候车室所有旅客进行动态测温,从而实现自主防疫的功能。
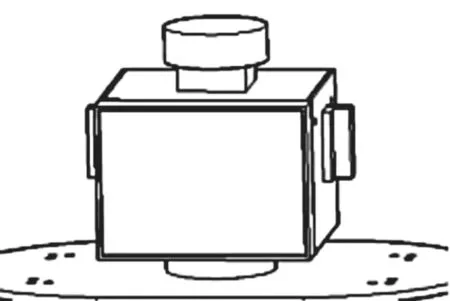
图5 机器头部结构设计图
3.1.4 双臂的组成及功能
机器人胳膊包括胳膊固定架、大臂支座、大固定旋转臂、大动力旋转臂、大臂连接板、大动力舵机、连接肘关节、小固定旋转臂、小动力旋转臂、小臂连接板、动力舵机、橡胶手以及舵机驱动板,如图6 所示。机器人胳膊固定在机器人躯体上,可以在与旅客交流时展示简单的肢体语言。机器人胳膊由大臂、小臂以及手组成,机器人的胳膊能够在舵机驱动板的驱动下控制大动力舵机和动力舵机,从而实现机器人胳膊的运动功能。

图6 机器胳膊结构设计图
3.1.5 机器人外壳的组成及功能
机器人外壳包括走行车外壳、机器人双腿外皮、机器人躯体外皮、机器人胳膊外皮以及机器人头部外皮,如图1 所示。走行车外壳两头均为动车车头形状,能够包裹固定在机器人走行车外侧,走行车外壳两侧均呈流线型,可以在避免机器人走行车被碰撞的同时展示铁路文化元素。机器人双腿外皮、机器人躯体外皮、机器人胳膊外皮以及机器人头部外皮均为橡胶材质,可以避免出现机器人因意外碰撞而被损坏的情况。机器人双腿外皮拥有足够的弹性,可以满足机器人双腿伸缩时维持美好外观的需求。机器人胳膊外皮、机器人躯体外皮以及橡胶手能够粘连在一起。机器人头部外皮可以维持客运分流引导机器人的美好外观。此外,还可以在机器人躯体外皮上套装铁路制服,模拟客运员的外形。
3.2 机器人软件控制功能的实现
3.2.1 语音交流功能的实现
语音交流功能的实现必须依赖于语音识别模块、语音喇叭、核心板以及语音转换板4 类硬件设备。即通过语音识别模块来获取旅客的问询信息,将获取的信息传输给核心板进行处理运算,通过分析旅客的询问信息,智能匹配对应“语音数据库”中的问题及解答语音,并通过语音喇叭解答旅客的询问。
在分析旅客需要的引导服务时,提示旅客进行客票识别操作,即将身份证放在手触操作屏的识别区域,根据身份信息及图像识别功能等综合判断旅客是否属于弱势群体,再决定是否给予引导服务。确定旅客属于弱势群体后,通过语音信息转化板将旅客提供的位置信息转化为控制驱动板的运动信息,从而实现将旅客引导至目的地的功能。
机器人的语音数据库是机器人处理核心通过局域网即时获取的动态数据库,一部分来自车站的接发列车即时信息库,另一部分来自客运员人工动态维护增加的语音数据库。这种提前为系统准备识别问题和对应解答语音的方法可以实现机器人单机自主服务运行的功能,无须联网运行。它的优点在于机器人在运行时无须连接互联网,在避免网络安全风险的同时节省了电信网络服务的成本。
3.2.2 SLAM 自主建图导航功能
客运分流引导机器人的设计采用单机方案,即1 台机器人自成1 套独立系统,无须连接互联网。因为使用互联网不仅会增加机器人的使用成本,使机器人的设计变得更加复杂、不便维护;而且铁路候车室距离铁路线路较近,铁路线路附近的接触网具有高压电,高压电的电流变化也跟随其负载的变化而不断变化,最终严重影响互联网信号的传播。客运分流引导机器人不论采用GPS 定位导航,还是更加精准的北斗定位导航,都会在工作中因信号传输中断而导致机器人工作出现不稳定的现象。
因此,客运分流引导机器人采用SLAM 自主建图导航的技术[4-6]实现机器人为旅客提供精准引导服务的功能。首先,客运分流引导机器人需要通过激光雷达模块充分地对候车室周围的环境进行扫描和识别,通过激光雷达转化板和核心板将扫描和识别的区域建成激光雷达模块能够识别的地图,并将该地图储存在核心板上。其次,对该地图上的位置信息进行人工标记和区别处理,对旅客经常想去的关键位置信息数据进行提取储存(备用)。当旅客通过语音模块或手触操作屏将需要引导地点告知机器人系统时,对比之前提取的关键位置信息数据,将该数据传输给机器人驱动板,驱动板控制走行车运动。在运动过程中,激光雷达模块不断扫描候车室周围环境并与事先建好的地图数据进行对比,逐渐靠近关键位置信息的目标数据,直到与关键位置信息的目标数据值重合为止。最后,到达目的地,导航任务结束,机器人胳膊作出简单的肢体动作,并通过语音喇叭告知旅客已到达目的地。
因为激光雷达的测距精度很高,所以采用激光雷达模块自主建图导航的精确度也非常高。但是激光雷达导航对候车室周围物体环境的依赖非常强,除运动中的旅客外,候车室其他物体位置的变化都会影响导航的准确性。
3.2.3 图像识别及动态测温功能的实现
机器人图像识别主要分2 种情况:1) 为了更方便地为旅客提供客运服务,即身份证客票识别,机器人根据读出的客票信息主动提示旅客去哪个检票口、哪个站台乘坐列车。2) 当旅客提出为其提供引导服务时,机器人判断其是否满足弱势群体条件,是否能为其提供引导服务,避免出现浪费客运服务资源的现象。这种图像识别主要通过手触操作屏上的摄像头获取旅客外貌特征等信息,然后根据身份证年龄进行人群筛选。
动态测温功能是机器人在候车室自主巡航时,通过安装在机器人头部的远距离测温模块来实现的。远距离测温模块能够快速对周围3 m 内的所有人或物体进行测温,即在机器人运动巡航的过程中进行持续测温,实现动态防疫的功能,同时也能够动态发现一些潜在的火灾隐患。在发现发热旅客后,远距离测温模块发出警告,将该信息反馈给机器人核心板,机器人核心板通过无线网络将信息快速反馈给客运总控室,启动人工隔离疏散应急流程。
3.2.4 机器人软件编程控制的实现
因为ROS 系统功能包[7]中包括足够丰富的功能包集合,且其属于开源功能包,能够满足客运分流引导机器人的研发需求。所以该控制系统首先在树莓派4B+8G 的高配开发板安装了Ubuntu 软件库,并配置了ROS 机器人系统。其次,对客运分流引导机器人的走行驱动板、胳膊驱动板、激光雷达模块以及语音识别模块等传感进行个性化系统配置。例如使用代码安装伺服电机所需的功能包和驱动程序,代码如下。

在对该控制系统进行配置时,可以使用安装Ubuntu 的虚拟机或实体计算机对其进行操作配置,具体方法如下:采用Wi-Fi 连接同一路由器的网络,通过配置IP 地址的方法达到计算机对机器人控制系统进行远程操控和资源配置的目的。最后,使用Python 编程语言对不同硬件进行协调控制,例如,协调语音控制与自主导航之间的逻辑控制关系,即语音识别模块在识别关键位置信息时发送信息指令,以操控自主导航模块完成动作[8]。
4 结语
该文分析了客运分流引导机器人的研发需求,介绍了客运分流引导机器人的硬件构成和软件工作原理。通过介绍客运分流引导机器人的各项功能论证了客运分流引导机器人具有节约客运组织成本、提升客运服务质量以及提升旅客旅行体验的优势,能够促进铁路客运服务朝高质量方向发展。
此外,该机器人采用单机控制模式,避免了因采用互联网终端在铁路车站控制机器人而引起的信号传输不稳定的缺陷,同时也节约了维护互联网的费用。目前,国内外铁路车站尚未出现类似的服务型机器人,客运分流引导机器人的研究对后续类似机器人的研发具有较高的参考价值。
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
中国民间疗法(2021年14期)2021-08-30
中国特种设备安全(2021年8期)2021-02-10
文学港(2019年5期)2019-05-24
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
上海铁道增刊(2017年3期)2018-01-22
汽车与安全(2016年5期)2016-12-01
诗林(2016年5期)2016-10-25