一种红外探测器频域参考像元校正的设计方法
2021-06-13 17:30尤鑫川王华薄姝夏丹妮
航天返回与遥感 2021年2期
尤鑫川 王华 薄姝 夏丹妮
(北京空间机电研究所,北京 100094)
0 引言
红外探测器参考像元校正是在采样前从有效像元中扣除参考像元输出,从而降低探测器的读出噪声。国际上对于红外探测器的参考像元在过去很长一段时间并无深入研究,较早发射的哈勃空间望远镜(HST)宽视场相机WFC3采用的参考像元校正方法为用有效像元的输出值减去所在象限所有参考像元的中值[1],这与可见光探测器的校正方法相同。虽然红外探测器与可见光探测器具有相似的电学结构,但是由于红外探测器中参考像元和可见光CCD[2]以及CMOS[3]探测器常用的暗像元(遮光像元)不同,是通过不连接光敏管的方式实现不感光,其中不包含可见光探测器参考像元校正中必不可少的暗电流噪声,因此不应直接套用可见光校正方法。国内目前对于红外探测器的参考像元研究较少,直接套用可见光探测器的参考像元校正方法也因效果不明显而被舍弃,大部分红外探测器通常不进行校正[4-8]直接输出有效像元数据,这使得读出噪声较大,影响系统信噪比。
近年来,国际上提出了两种较为复杂的红外探测器参考像元校正方法。一种为欧洲航天局(ESA)研制的欧几里得空间望远镜(EUCLID)近红外光谱光度计(NISP)使用的均值校正法。该方法针对单个有效像元,使用其对应的参考像元组(64×4)的均值进行校正[9],突出特点是不同的有效像元使用不同的参考像元组。另一种为詹姆斯韦伯空间望远镜(JWST)近红外光谱仪(NIRSpec)所使用的读出及校正(Improved Reference Sampling & Subtraction,IRS2)方法[10-12]。IRS2法是目前国内外唯一一种从频域进行设计的参考像元校正算法,通过对比分析有效像元和参考像元的频谱,设计并使用合理的系数谱对有效像元进行校正。上述两种算法在其给定的测试环境中均取得较好的降噪效果。
但是EUCLID使用的均值校正法只对白噪声有较好的降噪效果,对于相关噪声部分效果极差甚至反而会增大噪声值。而IRS2的设计过程中只考虑相关噪声忽略了白噪声,在白噪声不可忽略时该校正方法的降噪效果极差;此外为了满足算法需要,IRS2算法必须使用其规定的独特的读出顺序,而目前国内红外探测器无论是噪声性能还是读出过程均无法满足该算法的要求。基于此,本文提出一种新的红外探测器频域参考像元校正的设计方法,该方法在均值校正和IRS2校正算法的基础上,在系数谱设计过程中对白噪声进行滤波处理。在白噪声可忽略时,本方法可以得到与IRS2方法基本一致的校正结果,根据探测器读出过程通过谱线合并放宽读出过程要求;在白噪声为主相关噪声可忽略时,本方法的校正结果与均值校正近似相同;在两种噪声均不可忽略时,可以得到比上述两种方法更好的降噪效果。
1 校正原理
参考像元校正需要依据探测器的实际噪声特性进行设计,否则无法达到预期的降噪效果。探测器的输出信号里除了图像信息外还混杂了多种白噪声和相关噪声。白噪声指功率谱密度在整个频率内是常数的噪声,如电阻产生的热噪声、pn结产生的散粒噪声、温度噪声等均为白噪声[13-14]。而相关噪声的功率谱密度不为常数,如光电耦合器件的产生-复合噪声(g-r noise)、闪烁噪声(1/f noise)、随机电报信号噪声(RTS)等均为相关噪声。法国里昂大学研究团队针对Teledyne 公司H2RG红外探测器进行了一系列测量,使用直接证据证明该探测器电学结构会产生1/f噪声,且在系统噪声中占有重要成分[15-16]。g-r噪声、1/f噪声具有长程相关性[17-18],即噪声序列不同时间的观测值具有显著相关性。参考像元和有效像元的输出中部分噪声为同源噪声,同源噪声在有效像元和参考像元输出中的噪声分量为同一噪声序列。频域校正就是利用同源噪声的相关性实现降噪效果,相关性越显著,降噪效果越好;相反,均值校正针对同源噪声的白噪声,利用统计学特性进行降噪。而对于非同源噪声部分则无法通过参考像元校正降低。
对于不同种类噪声,本文将从单点校正、均值校正和频域校正三种角度进行分析。单点校正可视为均值校正的极端情况,即使用一个参考像元的输出数据进行校正,该参考像元一般选择同时刻采样或相邻时刻采样的参考像元。均值校正即扣除多个参考像元的均值或加权值,通过统计方法减小噪声方差。频域校正即先将有效像元和参考像元信号转换至频域,在频域内完成扣除后再反变换回时域得到校正结果。
1.1 白噪声
白噪声指功率谱密度为常数的随机信号,根据其幅值分布可以进一步细分为泊松白噪声、高斯白噪声等。白噪声在任意时刻的幅值是随机的,与其前后幅值均无关。参考像元和有效像元中不可能在同一时刻由同一白噪声源引入同种白噪声,无论是同一白噪声源不同时刻引入的白噪声,还是不同噪声源引入的白噪声,都不具有任何相关性。
因此,采用单点校正会导致输出结果不仅包含有效像元的白噪声,还包括新引入的参考像元的所有白噪声,造成总白噪声的增加。
采用均值校正则可以通过统计均值的方法降低白噪声。以高斯白噪声为例,n个噪声信号相互独立,都服从高斯分布(μ,δ2)。由于相互独立,n个噪声信号的加权累加和仍服从高斯分布由于加权系数和为1,因此多个噪声信号的加权累加和的方差会变小,即总的白噪声降低。
图1 为参考像元和有效像元均包含多种不相关的泊松白噪声和高斯白噪声时不校正、单点校正和均值校正的MATLAB仿真结果,横坐标参考像元的个数对范围为1至50,对应使用1至99个参考像元,纵坐标为输出噪声总的电压均方根(RMS)值即(系统噪声)。其中,对称均值校正指其使用的参考像元组的采样时刻关于该有效像元对称,即使用与该有效像元同时刻采样的参考像元以及前、后时刻采样的若干个参考像元;非对称均值校正使用与有效像元相同时刻采样的参考像元及已经完成采样的若干参考像元,所有参考像元的采样时刻均在有效像元采样之前;单点校正和不校正分别固定使用1和0个参考像元,与横坐标无关,图中仅做对比。使用对称参考像元组时,在频域中其采样冲激函数的虚部会恰好相互抵消,整个采样冲激对的相位为0。因此,对称均值校正的显著特点是计算均值的过程中不会出现相移,均值的相位与有效像元同时刻采样的参考像元的相位保持一致。而非对称均值校正根据选择参考像元组的不同,会产生不同程度的相移。

图1 白噪声电压仿真结果Fig.1 Simulation results of white noise voltage
从图1中可以看出:1)使用单点校正反而会增大白噪声,图中校正后系统噪声高于不校正时的噪声。2)使用对称参考元和非对称参考元进行均值校正时,相比单点校正和不校正的系统噪声更低;使用均值校正可以有效降低系统噪声,并且图中随着使用的参考像元数目的增多,系统噪声不断降低,降噪效果越好。3)当参考像元数目增加至21个,对应图中横坐标为11时,均值中的白噪声大小已经远远低于有效像元自身的白噪声大小,再增加参考像元数目不会对总的噪声产生明显影响。4)对称参考元和非对称参考元的频域特性截然不同,但降噪效果完全相同。采用时域加权的效果与加权系数的频谱、参考像元和有效像元的时间差均无关,仅与使用的参考元数目及时域加权系数有关。不可能通过IRS2即频域校正的方式降低白噪声。
因此,对于白噪声占主要成分的系统可以使用均值校正的方式降低白噪声,相比最简单的单点校正,仅仅额外使用几个参考像元进行校正就可以很大程度上降低白噪声。
1.2 相关噪声
探测器中可能出现的相关噪声种类过多,不过在许多性能较好的红外探测器中,1/f噪声是探测器读出噪声的主要组成部分。因此这里以1/f噪声为例介绍相关噪声的降噪原理。
自相关函数不为冲激函数的噪声信号称为相关噪声,维纳-辛钦定理指出信号的功率谱密度是其自相关函数的傅里叶变换,因此相关噪声的显著特点是其功率谱密度不为均匀分布的常数。参考像元频域加权校正的频域、时域形式分别为:

式中Gd'ata为校正后的输出;Gdata为有效像元输出;refoutG为参考像元输出;K为频域加权系数;f为系统频率;gd'ata、gdata、grefout、K、t分别为对应变量Gd'ata、Gdata、refoutG、K、f经离散傅里叶反变换后的时域值。将t=0代入式(2)可得

式中gdata(0)为某个有效像元数据;grefout(n)为与该有效像元间隔为n的参考元数据;k(-n)为对应的时域加权系数;gd'ata(0)则为该有效像元校正后的输出数据。通常在系数谱设计完成后将其反变换至时域即利用式(3)进行工程实现。针对每个有效像元依次进行式(3)的计算后校正完成。
理想情况下,噪声能量谱的幅值代表所含噪声在各个频率谱段上的能量,相位代表噪声各个频率上的初始相位。然而,由于噪声成分过于复杂,总采样时间不可能恰好是噪声周期的整数倍,因此通过快速离散傅里叶变换(FFT)得到的相位谱本身就有很大的误差。更关键的是,实际噪声信号几乎都为功率信号,周期内能量不收敛,不满足狄利克雷绝对可积条件,其能量谱很可能不存在。工程中得到的是截断的功率信号,截断的功率信号能量有限,可以进行离散傅里叶变换,但变换后的频谱并不是信号的真实能量谱,而是截断信号的卷积谱。由于截断的信号包含随机过程,其卷积谱仍含有复杂的随机过程,具体表现为不同截断信号变换后的频谱不稳定且难以反映真实的频域信息。为此,文中采用经典谱估计中的周期图法来得到信号的功率谱近似估计[19-21]。图2为未使用周期图法和使用周期图法叠加不同次数的频谱对比结果,当叠加次数足够多时就可以近似得到理想的功率谱。


图2 截断后1/f噪声信号FFT后的卷积谱Fig.2 Limited 1/f noise signal with the FFT periodogram method
周期图法有两个弊端[19-21]:1)分段后采样点数变少,频率分辨率变差;2)谱估计得到的是信号的功率谱,相位信息会全部丢失。在本文应用中这两个弊端都可以忽略,原因是:1)快速离散傅里叶反变换后时域卷积系数与频率加权系数的点数相同,因此实际操作中也会对频谱中相邻谱线进行合并以控制时域卷积窗的大小,频率分辨率变差不会产生很大影响;2)参考像元和有效像元的相关信号相位一般都保持一致。图3所示为不使用周期图法时1/f噪声混杂较多高斯白噪声时有效像元和参考像元的相位谱及相位差,其中图3(a)和(b)显示有效像元和参考像元各自的相位谱十分混乱,但在图3(c)中1/f噪声集中的低频谱段内(低于1000Hz的区间)两者相位差近似稳定为0。由此可知,在相关噪声所在的谱段中,尽管各自的卷积谱相位不确定,但两者之间的相位差仍近似为固定值,因此可以通过这种方式得到相位差信息。
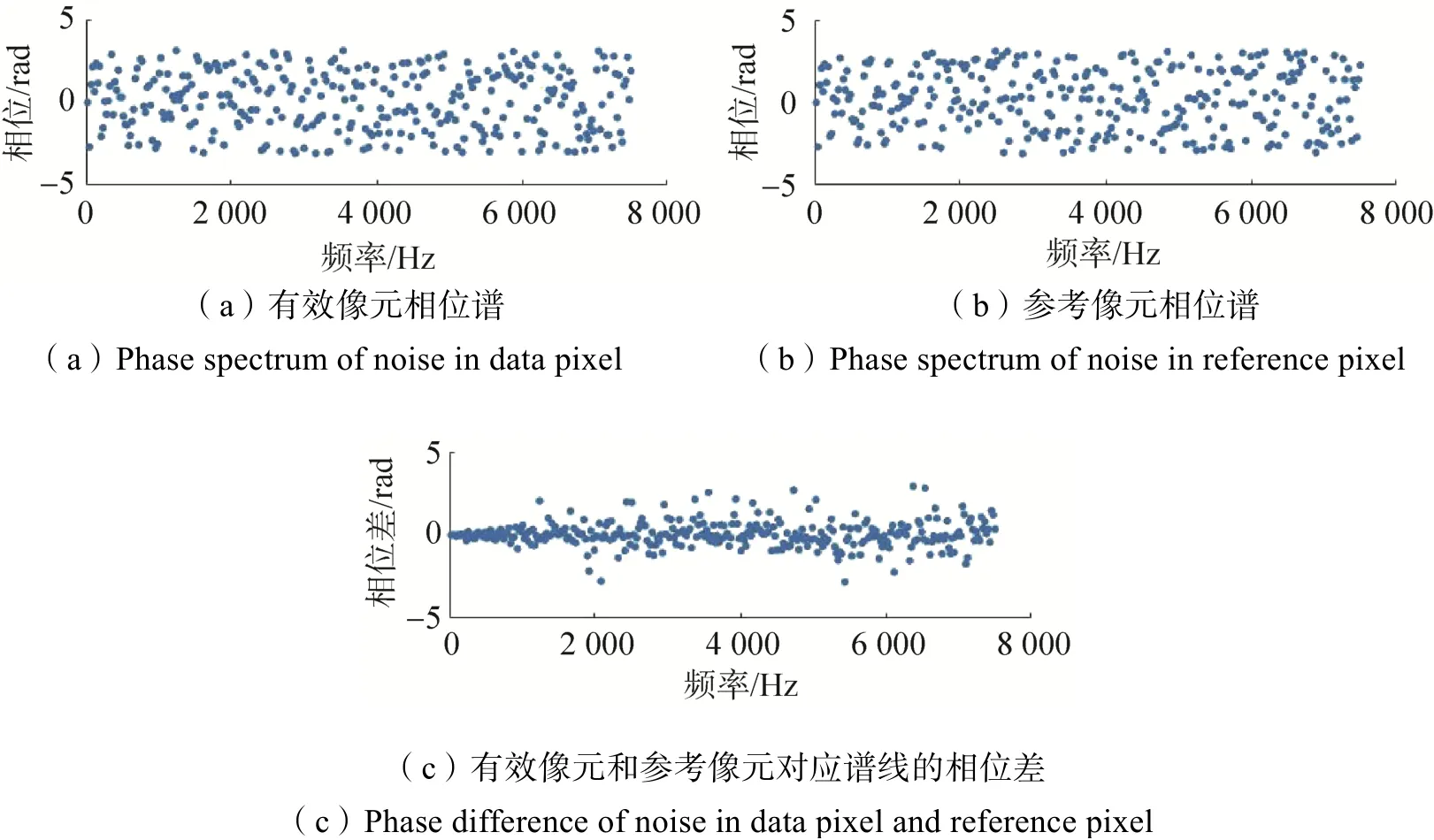
图3 不使用周期图法时有效像元和参考像元输出的相位谱及相位差Fig.3 The noise in reference pixel and data pixel in Fourier domain and their phase difference
采用不同校正方式的1/f噪声均方根仿真结果如图4所示。当系统只含1/f噪声时,由于其具有很强的相关性,单点校正直接扣除同时刻或相邻时刻采样的参考像元即可极大地降低1/f噪声,图4中单点校正为完全消除相关噪声的极端理想情况。相反,采用均值校正反而会增大1/f噪声,且加权的点越多、
降噪效果越差,这与白噪声的情况刚好相反。除此以外,相关噪声的降噪效果与校正所用的频域系数谱有关,均值校正中所用参考像元组是否对称会显著影响降噪效果,这也与白噪声的情况完全不同。由于此项仿真中有效像元和参考像元中添加的为同一1/f噪声,且其相位差为0,所以校正所用系数谱的相位越接近0降噪效果越好。因此,系数谱相位在整个频域内恒定为0的对称均值采样的降噪效果优于非对称均值采样。
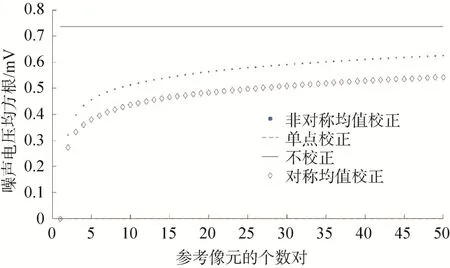
图4 采用不同校正方式的1/f噪声电压仿真结果Fig.4 Simulation results of 1/f noise voltage RMS
2 设计方法
根据前文白噪声和相关噪声的校正原理可以看出,EUCLID中使用的均值校正可以有效抑制系统白噪声分量,但会放大相关噪声分量;相反,IRS2使用的频域校正可以有效抑制相关噪声分量,但会放大白噪声分量。工程实际中很可能系统白噪声与相关噪声均不可忽略,这时无论采用哪种方法都无法得到较好的校正效果。综合两种噪声的降噪原理,本文给出在白噪声与相关噪声均不可忽略时频域参考像元校正的设计方法,具体步骤为:
1)测量噪声的频域特性,包括幅值和相位两部分。将有效像元和参考像元的输出序列分别进行快速离散傅里叶变换得到两者的卷积谱,再通过周期图法或其他谱估计方法得到功率谱,功率谱中包含噪声的幅值特性。如果功率谱近似为常数,则系统噪声以白噪声为主;若不为常数但高频部分近似为0,则以1/f噪声等相关噪声为主;若高频部分近似为非零常数则两种噪声均不可忽略。将两者卷积谱相除,比值的相位谱即代表两者噪声的相位差。
2)将第一步中由谱估计得到的功率谱以及卷积谱比值的相位谱进行谱线合并。通过插值使得每根谱线的宽度与探测器的采样频率保持一致。如果谱线宽度与采样频率不同,则无法得到算法所需的所有数据,导致算法无法实现。相比IRS2方法,新加入的谱线合并操作可以适当放宽对探测器读出频率、顺序的要求,但相应也会影响降噪效果。
3)设计频域系数谱的幅值和相位。IRS2方法中直接将两者卷积谱的比值作为系数谱,这种处理存在两个问题:①卷积谱中两者幅值比值不为稳定值,使用不同的数据序列会得到不同的比值。不过其使用近百万个参考像元数据进行计算,超长数据序列确实会有稳定的卷积谱,但如此庞大的计算量对于星上存储空间、计算速度都提出了极高的要求。②其探测器噪声性能优越、无需滤除白噪声,这也直接导致了在其他探测器中使用该算法反而会放大白噪声分量的致命问题。基于这两点,本文算法在设计频域系数谱时额外加入了滤波处理:①记录功率谱中幅值几乎不变的谱段(即只包含白噪声的谱段),计算这些谱段的幅值均值。将功率谱中白噪声谱段的幅值固定为0,其余谱段的幅值减去白噪声谱段幅值均值。使用处理后功率谱的比值作为频域系数谱的幅值。②白噪声谱段范围内系数谱的相位固定为0,其余谱段的相位仍与卷积谱相位差一致。
4)将频域系数谱开根号后进行快速离散傅里叶反变换,保留实部即可得到对应的时域系数。在时域中计算只需要存储预设的时域系数,无需同时存储所有参考像元数据,可以极大地降低星上数据处理的压力。
3 仿真分析
由于g-r噪声、偏置电压波动引起的噪声、奇偶列固定模式噪声很难完整仿真,仍用多种1/f噪声、高斯白噪声和泊松白噪声的混合噪声作为仿真条件。给出不同噪声条件下不校正、单点校正、均值校正、本文设计的方法频域校正及未经过滤波处理的IRS2方法校正的仿真结果。其中单点校正是指能完全消除相关噪声的极端理想情况,均值校正细分为使用所有参考像元参与计算和只使用5个参考像元参与计算两种类型。
在以1/f噪声为主时不同校正方法的仿真结果如表1所示,可以看出:1)在以相关噪声为主时,频域校正方法会优于均值校正,但两种均值校正方法都会导致系统噪声增大,且使用参考元越多、降噪效果越差。2)两种频域校正方法对于相关噪声的降噪效果很好,相比不校正系统噪声均大幅降低。3)由于1/f噪声在高频区和白噪声无异,本文频域校正方法在设计频域加权系数的过程中,会不可避免地错误滤掉了部分1/f噪声成分,甚至白噪声幅值扣除过多,这种情况错误地判断白噪声谱段范围会影响降噪效果。因此在以相关噪声为主时,跳过白噪声滤波步骤会更好。

表1 1/f噪声为主时不同校正方法的仿真结果对比Tab.1 The simulation results of different correction methods with 1/f noise dominant 单位:mV
在只以白噪声为主和两种噪声均不可忽略时,不同校正方法的仿真结果分别如表2和表3所示。由表2可以看出,在只包含白噪声时,两种均值校正的仿真结果噪声最小,IRS2方法的噪声最大,本文改进的频域校正方法处理得到的系统噪声与均值校正相近,解决了IRS2方法无法处理白噪声的问题。分析表3可以发现,在两种噪声均不可忽略的情况下,无论是采用均值校正还是IRS2方法噪声大小都接近甚至高于不校正,而使用本文提出的频域校正方法时系统噪声在不同条件下均低于其他方法,此方法可以更大程度地降低系统噪声。

表2 白噪声为主时不同校正方法的仿真结果对比Tab.2 The simulation results of different correction methods with white noise dominant 单位:mV

表3 1/f噪声和白噪声都不可忽略时不同校正方法的仿真结果对比Tab.3 The simulation results of different correction methods without noise dominant 单位:mV
4 结束语
本文通过MATLAB仿真对红外探测器中使用参考像元校正降低白噪声、相关噪声的作用原理进行了探究,针对目前国际上较为先进的均值校正法和IRS2频域校正法的工作原理进行了研究分析,结果显示:均值校正法可以有效降低系统白噪声分量,但同时会明显放大系统中的相关噪声分量;利用相关噪声的自相关性使用频域校正方法,可以有效降低相关噪声,但此方法也会显著放大系统中的白噪声分量;当系统中白噪声成分和相关噪声成分均不可忽略时,上述两种方法均无法有效降低系统噪声。
在IRS2频域校正方法的基础上,本文提出了一种新的红外探测器参考像元校正方法。该方法使用周期图法等谱估计的方式得到系统噪声功率谱更为准确;利用插值法进行谱线合并大幅降低了原方法对探测器读出顺序、星上数据处理能力的要求,使其能够适配更多探测器;本文方法选择在设计频域系数前先进行滤波处理,去除功率谱中白噪声成分后再进行频域校正,有效解决了原方法会放大白噪声成分的致命问题。
猜你喜欢
装备维修技术(2022年7期)2022-07-01
人民长江(2021年9期)2021-10-18
振动工程学报(2019年2期)2019-05-13
大众摄影(2018年6期)2018-06-19
中国新技术新产品(2018年22期)2018-01-05
佛山陶瓷(2017年8期)2017-09-06
筑路机械与施工机械化(2016年12期)2017-01-13
物联网技术(2016年11期)2017-01-12
科学与财富(2016年18期)2016-12-22
能源研究与信息(2015年3期)2015-11-18