
基于STM32的智能搬运机器人的研究与设计
2021-06-28 12:23姚思嘉刘芸邵铭旭王鹏家
电子测试 2021年2期
姚思嘉,刘芸,邵铭旭,王鹏家
(北京信息科技大学机电工程学院,北京,100192)
0 引言
在中国,60岁以上的老年人口已经超过2亿。预计到2030年,老年人口可达4亿,养老问题日趋严峻,中国对护理人员需求约增加到两千万人次。由于护理老年人的工作量大,护理人员较少,寻找护理人员极为困难。研制养老服务机器人代替人工辅助老年人进行一些基本抓取活动,可有效缓解家庭负担,减轻护理市场人员短缺的压力,提升老年人的生活质量,保障社会的稳定发展[1]。目前市场上的服务类机器人多用于工厂方面,本文设计了一种操作简单、智能性高、能适应多种操作环境,基于STM32单片机,辅助老年人日常行为活动的智能搬运机器人。
1 总体结构设计思路
机器人系统的总体架构如图1所示,系统以STM32单片机[2]为主控,机器人主要由传感器系统、步进电机驱动装置、行进机构等模块组成。通过装载的超声模块,可以得到机器人与障碍物的距离,实现自主避障。红外模块对超声模块的测量死区进行补偿,倾角模块感知机器人的方位角度,辅助运动装置运行,保障机器人的平稳行进。

图1 总体架构
2 智能搬运机器人设计
2.1 行进机构设计
执行机构相对应的机械结构是机器人的行走装置,负责接收控制核心的命令,驱动机器人进行智能循迹,超声避障等操作。行走机构共有两种设计方案,均可满足控制需求。
(1)方案一轮式行走结构
轮式行走机构运行过程中,自身需要消耗一定的功率,一部分功率用于克服摩擦阻力,另一部分消耗在滑转上。四轮行走机构加装在机器人的机体下,提高了机器人的承载能力,其机械结构相对简单,易于控制。轮式行走机构的结构简图如图2所示。

图2 轮行走机构
(2)方案二履带行走机构
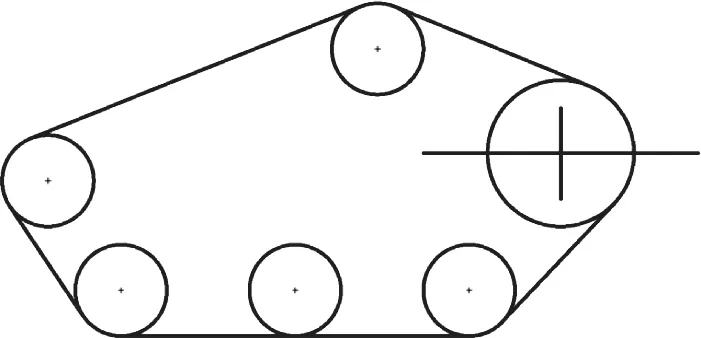
图3 轮履行走机构
相对于轮式行走机构,履式行走机构更为复杂。履式行走机构将轮子与机构相结合,可实现在复杂环境的稳定行驶。在复杂路面情况下正常工作,履式行走机构越障能力相比轮式更优越,具有较强的结构化适应力。履式行走机构的结构简图如图所示。
通过对比分析优劣,机器人的行走机构设计采用了方案二。
2.2 抓取机构
机械臂作为机器人最主要的执行机构之一,对它的研究是人工智能和机器人学的重要研究课题。目前,大多数机器臂都是安装在固定基座上的,它们的操作范围十分有限。
智能搬运机器人要求机器臂的抓持器能够以准确的位置和姿态移动到定点,机器人需要具有一定数量的自由度[3]。自由度是机器人的一个重要技术指标,由机器人的结构决定,直接影响机器人的机动性。机械臂能够对坐标系进行独立运动的数目称为自由度,机械臂能进行运动包括(图4):
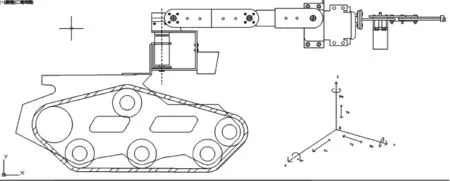
图4 机械臂自由度
沿坐标轴Ox,Oy和Oz的三个平移运动Tx,Ty,Tz;
绕着坐标轴Ox,Oy和Oz的三个旋转运动Rx,Ry,Rz。
一般来说自由度越多,机械臂的灵活性越大,通用性越广,其结构越复杂。机器臂的自由度是设计的关键参数,工作空间中机械臂要想达到任意位姿,自由度数目应该与所要完成的任务相匹配。
依据以上条件,抓取机构采用了六自由度链式关节。抓取器的三维建模如图5所示。

图5 机械抓取装置
2.3 传感器模块
传感器模块是机器人的“感知器官”,负责采集外部信息,将被测量按照数学函数法则转换成可用信号,提高机器人的自主性。其中搬运机器人的超声模块发出超声波碰到杂质或者分界面会产生显著反射形成反射回波,碰到活动物体能产生多普勒效应。依据此原理,机器人常采用渡越时间法[4]有效躲避障碍。超声模块的工作方式如图6所示。

图6 超声模块工作方式
机器人装载的ADXL345倾角传感器可检测自身状态,调控机械臂实现侧翻恢复。不同的传感器收发装置共同组成传感模块。
2.4 步进电机驱动装置
主控模块是机器人的大脑,负责处理感知机构所收集的外界环境信息,形成指令下发给执行机构。步进电机驱动装置设计采用高精度数字舵机,机器人行进发生堵转时,舵机内部自动进行保护,调控履带的行进方式。
3 程序设计
机器人使用32位基于ARM的微控制器控制,所编译的程序建立于定义的固态函数库之上,每一个器件的驱动程序的编写都在Keil上完成。在程序驱动下,STM32单片机完成系统初始化,串口与使用工业标准NRZ异步串行数据格式的外部设备之间进行数据交换,检测当前运行模式,控制机器人实现超声避障、定距抓取等功能。机器人采用模块化编程,功能模块控制程序编写成各个功能子程序,分为循迹,抓取,智能跟随等。
3.1 循迹子程序
在行走环境和空间结构变化不大的情况下,单片机获取传感器传输有效信号完成循迹避障。当超声波传感器检测到障碍物时,减速慢行,红外模块检测障碍物返回低电平,机器人停止直行调转方向,精准调控行进方向,完成规划路径。
3.2 定距抓取子程序
当有控制信号传输给单片机时,首先锁定物品,待机器人移动到最佳区域,输出停车信号驱动舵机控制高自由度舵机进行抓取。
3.3 智能跟随子程序
单片机首先将4个IO口初始化为输入口,通过预设代码确定两个变量speed1,speed2控制两条履带的速度,同时设置另外两个变量Ar1、Ar2判断履带转向,驱动机器人完成智能跟随。电机驱动函数配合定时器执行,由PWM来控制电机速度。定时器中调用另一函数,满足100us调用一次的条件即达到1KHz的频率,就由控制函数实现超声模块和电机装置的联结。程序通过判断超声波距离来确定小车是否前进或者后退,不满足设定条件则后退,小于则前进,运行流程如图7所示。

图7 智能跟随流程
4 结语
本文设计了一种基于STM32的智能搬运机器人,该机器人可运用于家庭等小空间场合,配合行为困难者完成一些简单的抓取活动,此种搬运机器人切合当今社会需求,对养老助残机器人的研究设计具有一定的参考价值和指导意义。分析比较履带式行走机构与轮式行走机构的优劣,对机器人的履带行走结构传动布局进行了简单的运动学和动力学分析。简述机器人机械臂的结构和控制问题。机器人通过传感器模块识别路径、发现目标,实现定距抓取,智能循迹等功能,研究了机器人的算法问题。以下是样机成品图8。
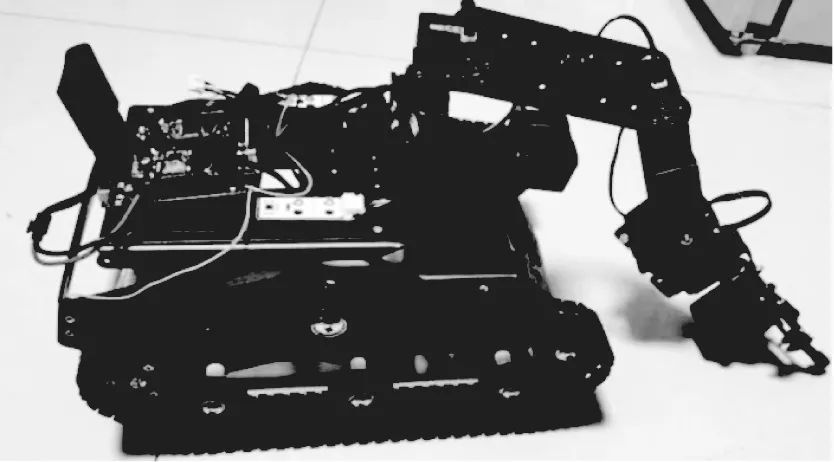
图8 实物样机
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
农业装备与车辆工程(2021年8期)2021-08-28
军民两用技术与产品(2021年10期)2021-03-16
南方农机(2021年1期)2021-01-20
港口装卸(2020年3期)2020-06-30
现代营销·理论(2019年10期)2019-09-10
制造技术与机床(2018年8期)2018-10-09
中国军转民(2018年1期)2018-06-08
电子制作(2017年1期)2017-05-17
电子制作(2016年11期)2016-11-07
