基于虚拟阻抗的逆变器并联系统柔性功率调控策略
2021-07-19 02:57王林
船电技术 2021年6期
王 林
基于虚拟阻抗的逆变器并联系统柔性功率调控策略
王 林
(海装驻武汉第二代表室,武汉 430060)
下垂控制作为无互联线的并联系统功率环控制技术,在逆变器并联系统中应用十分广泛。但是,对于传统的基于感性或阻性阻抗的下垂控制,各逆变器输出阻抗之间的差异会对并联系统的功率调节精度造成较大影响。针对以上问题,本文提出了一种基于虚拟阻抗的柔性功率调控策略,在实现逆变器输出功率解耦的情况下改善并联系统的功率分配精度,提高下垂控制的鲁棒性和控制性能。最后,通过逆变器并联系统验证了所提方案的有效性。
下垂控制 功率耦合 虚拟阻抗 功率分配
0 引言
对于逆变器并联系统而言,由于各逆变器连接线路的长度不同,以及逆变器间元器件参数的不一致,各逆变器的输出阻抗不可避免的会存在差异,且一般呈阻感性,这将会影响并联系统的功率调节精度,甚至损害系统的稳定性。因此,针对各逆变器输出阻抗之间的差异,研究改善逆变器并联系统功率分配的功率调控策略显得尤为重要[1]。
目前,当线路阻抗呈现阻感性时,逆变器并联系统功率耦合问题的解决方案主要分为以下四类:虚拟功率法,虚拟电压频率法,电压前馈补偿法和虚拟阻抗法。文献[2]提出了一种基于虚拟功率的改进下垂控制策略,通过旋转实际功率矢量得到仅与端电压频率相关的虚拟有功功率和仅与端电压幅值相关的虚拟无功功率,实现有功功率和无功功率的解耦控制。文献[3]提出了一种基于统一功率旋转角的改进虚拟功率法,通过旋转同一阻抗角来解决传统虚拟功率法中线路阻抗角不一致造成的有功功率和无功功率分配误差问题,但该方案无法做到完全解耦,系统的稳定裕度仍然较低。文献[4]提出了一种基于虚拟频率和电压的解耦策略,其本质类似于虚拟功率法,将频率和电压转换为虚拟帧,来间接实现功率的解耦控制。文献[5]采用了虚拟阻抗法来实现直接解耦,通过加入虚拟电感来补偿线路阻抗,保障线路阻抗近似呈现感性。
针对线路阻抗不匹配造成的功率耦合和功率分配误差问题,本文基于传统虚拟阻抗法,在下垂控制系统中引入虚拟负电感来补偿线路阻抗中的感性成分来实现有功功率和无功功率解耦。在此基础上,在逆变器的控制系统中引入虚拟阻抗来平衡逆变器的输出阻抗和线路阻抗,从而减小各逆变器之间的差异,实现较好的功率分配效果,并加入二次控制补偿电压跌落。
2 下垂控制的基本原理
图1所示为逆变器单元的等效电路图。其中,∠为变换器端输出电压,U∠0为PCC点电压,∠为变换器单元到PCC点的线路阻抗,和表示逆变器输出有功功率和无功功率。

图1 逆变器单元等效电路
根据图1,逆变器的输出有功功率和无功功率可以近似化简为


式中,E、w分别为逆变器空载输出电压幅值和角频率指令值;k、k为有功功率和无功功率的下垂系数;、分别为逆变器输出有功功率和无功功率;、为逆变器指令电压的幅值和角频率。
3 基于虚拟阻抗的功率解耦策略

由于下垂控制系统的输出功率耦合现象主要由线路阻抗的阻感特性引起,因此,可以通过添加虚拟电感来补偿线路阻抗,使得线路阻抗近似呈阻性,来实现有功功率与无功功率的解耦。通常来说,逆变器的电压、电流双环控制器的带宽相对工频较高,因此如果需要完全补偿线路阻抗中的感性成分,则应引入虚拟负电感来补偿线路阻抗中的感性成分来实现有功功率和无功功率解耦。
4 逆变器并联系统的柔性功率调控策略
由于各逆变器输出阻抗之间的差异,下垂控制存在功率分配精度和输出电压精度之间的矛盾。为了保障功率分配精度,需要引入较大的虚拟阻抗。但是,较大的虚拟阻抗会导致输出电压有较大跌落。因此,为了减小下垂控制和虚拟阻抗对输出电压精度的影响,需要补偿输出电压的幅值和频率。
考虑到逆变器并联系统输出电压精度和频率精度均和输出功率有关,因此,可以根据并联系统总的输出有功功率和无功功率实现输出电压和频率的二次控制。
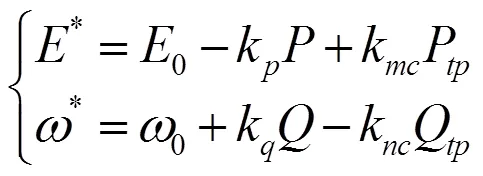
其中,P、Q为逆变器并联系统的输出有功功率和无功功率;k、k为有功功率和无功功率的补偿系数。
5 调控策略验证与结果分析
通过逆变器并联系统来验证所提方案的有效性和可行性,每台逆变器额定容量为10 kVA,通过CAN通信传送各逆变器的输出功率信息。各逆变器的线路阻抗为:逆变器1的连线阻抗Z1= 0.03+j0.01 Ω,逆变器2的连线阻抗Z2= 0.01+j0.02 Ω,逆变器3的连线阻抗Z3= 0.02+j0.01 Ω。其他电路参数如表1所示。由于各逆变器的输出线路阻抗均有较大的感性成分,因此,以感性成分较大的逆变器2为例,验证本文所提控制策略的有效性。

表1 三相逆变器电路参数
先将逆变器2并网运行,并在给定时刻提供1kW的有功功率阶跃。定义=|Δ/ΔP|为逆变器输出无功功率与有功功率的耦合系数,当采用传统下垂控制时,=49%,无功功率与有功功率存在较强耦合。同样设定ΔP=1 kW,ΔQ=0 Var。图3(a)和3(b)为采用基于虚拟阻抗的下垂控制下逆变器的输出有功功率和无功功率曲线。如图中所示,当基于虚拟阻抗的下垂控制启动后,无功功率Δ=-95Var,=9.5%。因此,该策略可以有效实现无功功率与有功功率的解耦。
图4、图5为采用相同的硬件参数下,逆变器控制中不加入虚拟阻抗和加入虚拟阻抗时三台逆变器的输出有功功率和无功功率曲线。从图中可以看出,在不加入虚拟阻抗时,由于逆变器参数的差异,并联模块的有功功率无法实现均分,并且误差随着负载功率增大而增大,误差功率接近平均功率的20%左右;在引入虚拟阻抗和电压幅值、频率二次控制之后,如图5所示,此时各逆变器输出输出阻抗基本一致,输出功率也接近相同,各逆变器模块之间能够实现功率均分,验证了本文所提出的并联控制策略的有效性。

图3 基于虚拟阻抗的下垂控制输出有功功率及无功功率曲线
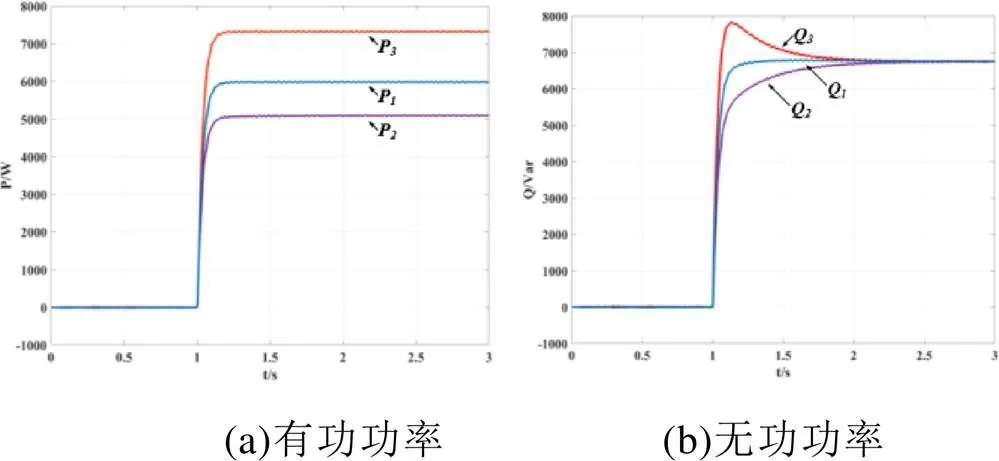
图4 无虚拟阻抗下并联系统各逆变器输出的有功功率和无功功率
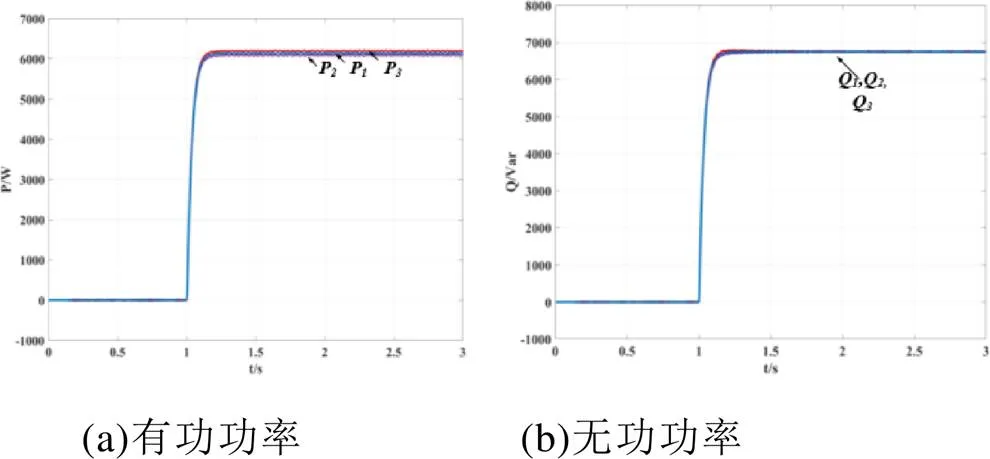
图5 有虚拟阻抗下并联系统各逆变器输出的有功功率和无功功率
6 结论
本文针对逆变器并联系统,分析了三相逆变器的输出阻抗特性,引入虚拟阻抗实现了逆变器输出功率的解耦,提高了下垂控制的控制精度。在此基础上,提出了基于虚拟阻抗和电压幅值、频率二次控制的混合控制策略,以降低各逆变器间输出阻抗的不平衡度,提高并联系统功率分配特性和电能质量。最后通过三台逆变器组成的并联系统验证了所提控制策略的可行性与有效性。
[1] Zhong Q C, Wang Y, Ren B. UDE-based robust droop control of inverters in parallel operation[J]. IEEE Transactions on Industrial Electronics, 2017, 64(9): 7552-7562.
[2] De Brabandere K, Bolsens B, Van den Keybus J, et al. A voltage and frequency droop control method for parallel inverters[J]. IEEE Transactions on power electronics, 2007, 22(4): 1107-1115.
[3] Wu T, Liu Z, Liu J, et al. A unified virtual power decoupling method for droop-controlled parallel inverters in microgrids[J]. IEEE Transactions on Power Electronics, 2015, 31(8): 5587-5603.
[4] Li Y, Li Y W. Power management of inverter interfaced autonomous microgrid based on virtual frequency-voltage frame[J]. IEEE Transactions on Smart Grid, 2011, 2(1): 30-40.
[5] 程军照, 李澍森, 吴在军, 陈江波. 微电网下垂控制中虚拟电抗的功率解耦机理分析[J]. 电力系统自动化, 2012, 36(07): 27-32.
Flexible Power Control Strategy for Parallel Inverters Based on Virtual Impedance
Wang Lin
(The Second Naval Representatives Office in Wuhan, Wuhan 430060, China)
TM464
A
1003-4862(2021)06-0026-03
2021-03-18
王林(1979-),男,硕士,工程师,研究方向:电力系统自动化。E-mail: 754515422@qq.com
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
山东纺织经济(2021年5期)2021-08-13
中国环境监察(2016年7期)2016-10-23
新闻传播(2016年9期)2016-09-26
现代工业经济和信息化(2016年8期)2016-05-17
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年24期)2016-04-12
通信电源技术(2016年5期)2016-03-22
西部广播电视(2015年10期)2016-01-18
当代教育论坛(2015年4期)2015-11-08