
一种新型欠驱动机器人手的设计与静力学分析
2021-10-12 00:37蒋瑞斌厉佐葵刘柏海
食品与机械 2021年9期
蒋瑞斌 左 萃 黄 龙 厉佐葵 刘柏海
(1. 湖南生物机电职业技术学院车辆工程学院,湖南 长沙 410127;2. 长沙理工大学汽车与机械工程学院,湖南 长沙 410076;3. 湖南生物机电职业技术学院机电工程学院,湖南 长沙 410127)
机器人的末端执行器,又称机器人手,是直接执行作业任务的装置[1-2]。对于生产线上的搬运作业,机器人手的结构通常为根据具体任务要求而设计的单自由度夹持器。这种单自由度夹持器的功能单一,难以适应不同形状和尺寸的目标物体。机器人手的自适应性需要其机构的多自由度来实现,然而完全控制这些自由度需要较为庞大的驱动控制系统和较为复杂的控制算法。为了降低机器人手的控制难度,欠驱动机器人手被广泛应用于工业上。机器人手的欠驱动特性是指其驱动电机的数目小于其自由度数目[3-4]。在夹持目标物体时,其手指可自动适应目标物体的不同形状或摆放位置,从而实现稳定有效的夹持作业。
欠驱动机器人手的传动方式主要包括绳轮传动、刚性连杆传动、气压传动、齿轮传动等类型。夏海超等[5]基于绳轮传动提出了一种可实现双向平夹的自适应机器人手,通过在指段上设计压力传感器使得该机器人手具有感知功能,并对其夹持动作过程和夹持力进行了仿真分析。马涛等[6]基于绳轮传动设计了一种双指欠驱动机器人手,并进行了结构优化和运动学分析,有效简化了机器人手结构和控制系统。Birglen等[7]通过串联多个刚性连杆关节设计了一种欠驱动机器人手,具有较好的自适应夹持性能。宾朋等[8]基于变自由度与机构死点理论设计了一种连杆传动式机器人手,可满足制药厂对药盒夹持的要求。王宜磊等[9]提出了一种用于采摘猕猴桃的连杆传动式机器人手,可有效避免对猕猴桃果实的磨损。通过对称布置两个平行四边形机构,Zuo等[10]设计了一种欠驱动机器人手,实现了平行夹持运动。王通等[11]提出了一种夹持果实的欠驱动机器人手,实现了手指机构包络式夹持果实。郭晓峰等[12]通过共圆连杆齿轮实现了平行夹持运动的欠驱动机器人手。张文增等[13]基于闭环柔性齿轮传动设计了一种平夹自适应的机器人手。然而,现有的机器人手大多结构复杂,在夹持过程时仅考虑了对目标物体的自适应包络夹持,难以实现各手指位置的自适应调整。此外,为了保证机器人手有效实现自适应夹持操作,还须对其进行力学分析,建立夹持力与驱动力之间的映射关系。机器人手的力学模型一般通过虚功原理建立[14],即作用在系统上的所有主动力在任何虚位移中所做的虚功之和为零。
针对上述问题,试验拟结合食品加工厂对包装盒的夹持要求,基于绳轮传动原理提出一种新型欠驱动机器人手;同时,结合动滑轮机构和恒力弹簧,实现机器人手的指间自适应,从而适应食品包装盒在一定范围内的位置变动;并基于虚功原理分析机器人手末端对包装盒的夹持力,验证机器人手的可行性,旨在为实际控制提供理论依据。
1 夹持过程及要求
机器人手自动夹持食品包装盒的工艺流程为:机器人手在预定位置等待食品包装盒—水平移动夹持食品包装盒—上升一定高度—移动至另一条生产线上—放置食品包装盒—移动到原生产线,继续夹持方形食品包装盒。机器人手在操作过程中的状态如图1所示,当食品包装盒放置在机器人手的两手指中间位置时,两手指的夹持运动规律相同;当食品包装盒放置未在两手指的中间位置时,两手指之间需具有自适应夹持能力。
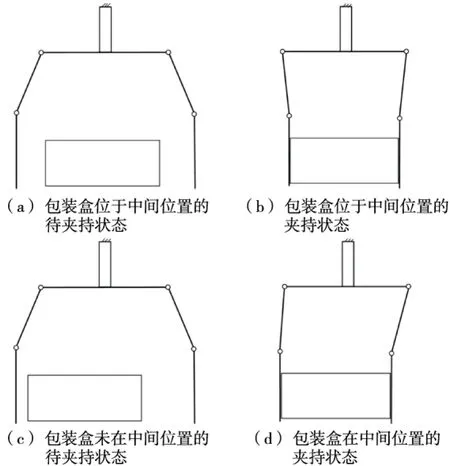
图1 机器人手的不同夹持状态Figure 1 Analysis of the motion mode of therobot hand
机器人手在夹持包装盒过程中需满足以下要求:① 当机器人手在流水线上做水平运动时,两手指不会触碰食品包装盒;② 机器人手在夹持过程中应保证足够的夹持力和摩擦力来提升食品包装盒;③ 在机器人手夹持状态下突然发生断电情况时,需保证机器人手仍然夹紧食品盒;④ 当生产线上的包装盒摆放存在较小误差时,机器人手指在平行夹取时需要保证两指间自适应的性能。
2 机构组成及欠驱动原理
2.1 机构组成

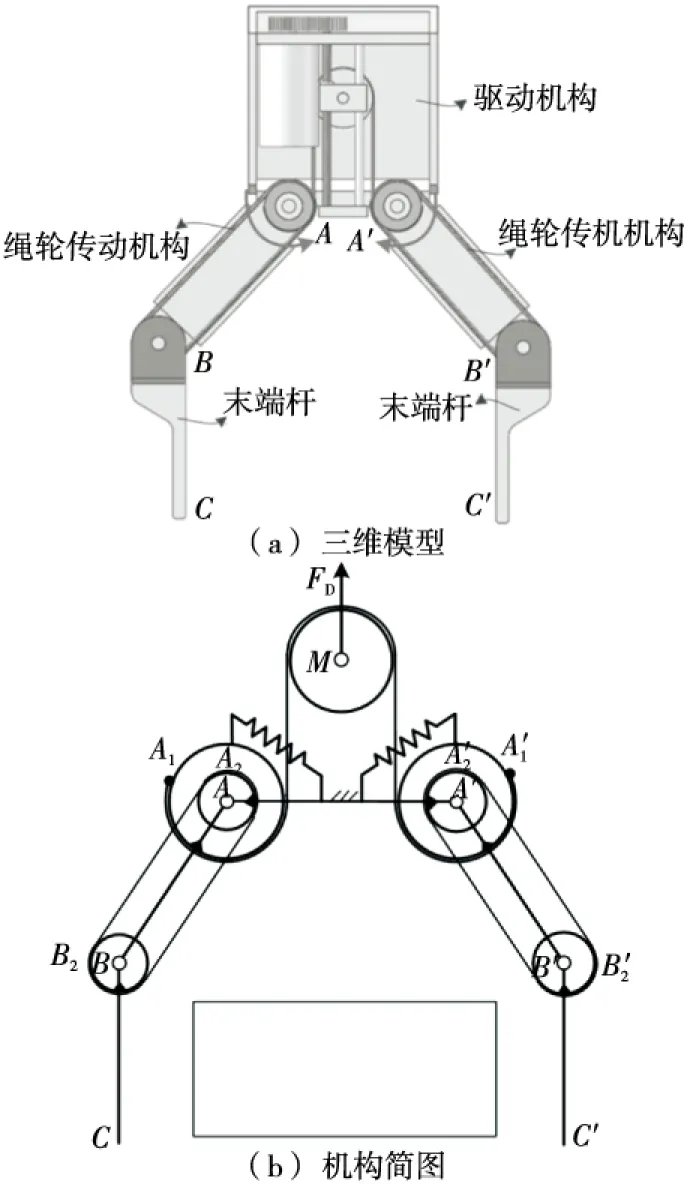
图2 欠驱动机器人手设计Figure 2 Design of the under-actuated robot hand
2.2 平行夹持原理
要实现机器人手的平行夹持,需要使连杆BC和连杆B′C′在运动中始终保持平行。该运动特点可以通过滑轮A2与滑轮B2之间的钢丝绳传动来实现。假设滑轮A2的转速为nA1,滑轮B2的转速为nA2,连杆AB的转速为nBC。根据周转运动可知
nA2-nAB=iAB(nB2-nAB)。
(1)
根据各构件连接关系可知,nA2=0,nB2=nBC,传动比iAB=1。因此,nBC=0,即连杆BC始终做平面平移运动。若连杆BC的内表面在初始状态下与地面垂直,则该表面在运动过程中始终与地面垂直。同样约束下,连杆B′C′的内表面也始终与地面垂直。因此,连杆BC与连杆B′C′始终保持平行。
2.3 机构自由度
该机构中的可动构件数量n为6,低副数量pL为6,高副(绳轮副)数量pH为4,则机构的自由度为
df=3n-2pL-pH=2。

2.4 机构指间欠驱动原理
3 静力学分析

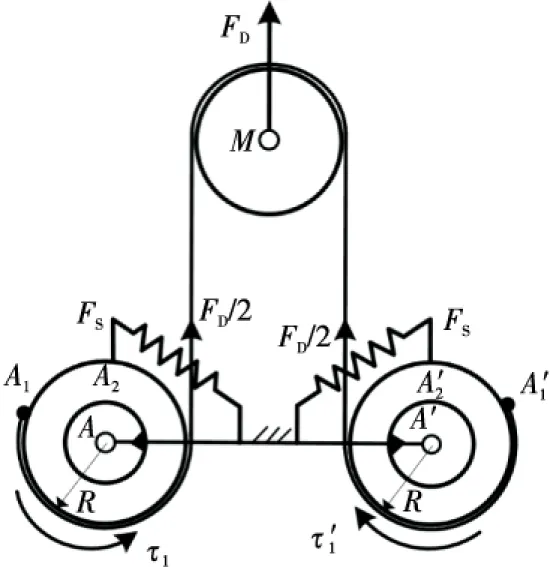
图3 机器人手的驱动机构受力分析Figure 3 Force analysis of driving mechanismof the robot hand

(2)
式中:
FS——恒力弹簧的回复力,N。
通过对机器人手驱动位置的特殊设置,可假设恒力弹簧在机器人手的两手指运动时FS为常数。
考虑食品包装盒放置在中间位置的情形,此时两侧手指的运动规律相同。由于该机器人手是对称式结构,在稳定夹取食品包装盒后,末端杆BC、B′C′上的夹持力和摩擦力分别相等,机器人手的受力如图4所示。
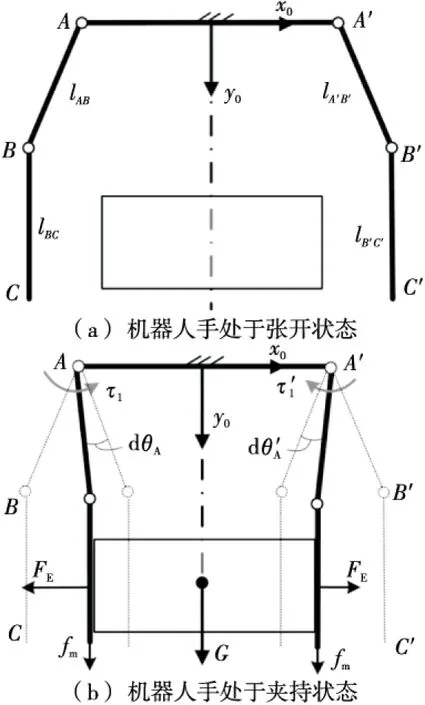
图4 包装盒位于机器人手的中间位置时力学分析Figure 4 Mechanics modeling when the box is in thenon-intermediate position
考虑左侧手指,假设在夹紧食品包装盒过程中,在铰链A处的虚转角为dθA,则力矩τ1产生的虚功为τ1·dθA。基于虚功原理可知:
τ1dθA=Fdx+fmdy,
(3)
式中:
F——末端杆BC、B′C′上的夹持力,N;
dx、dy——末端杆BC在水平方向和垂直方向上的虚位移,mm;
fm——摩擦力,N。
假设包装盒所受重力为G,由垂直方向上的合力为零可知fm=G/2。
由图5可知,左右两侧手指上的杆长度分别相等,令连杆AB的杆长为l。根据该机器人手的平面几何关系可知,在夹紧食品包装盒过程中两方向上产生的虚位移为
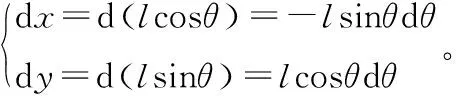
(4)
因此,式(3)可重新表达为
τ1dθA=-FElsinθAdθA+fmlcosθAdθA。
(5)
根据牛顿第三定律可知,当末端杆BC夹紧包装盒的同时,包装盒也同时给末端杆BC产生相同大小的法向力。因此,夹紧状态下,末端杆BC和包装盒间的最大静摩擦力fm=μFE。
根据式(5)和式(2)可知,末端杆BC、B′C′上的夹持力FE与总驱动力Fs之间的关系为
(6)
为满足在机器人手夹持状态下,该机器人手夹紧食品盒的要求,则当食品包装盒在机器人手的中间位置时,总驱动力Fs需要满足
(7)
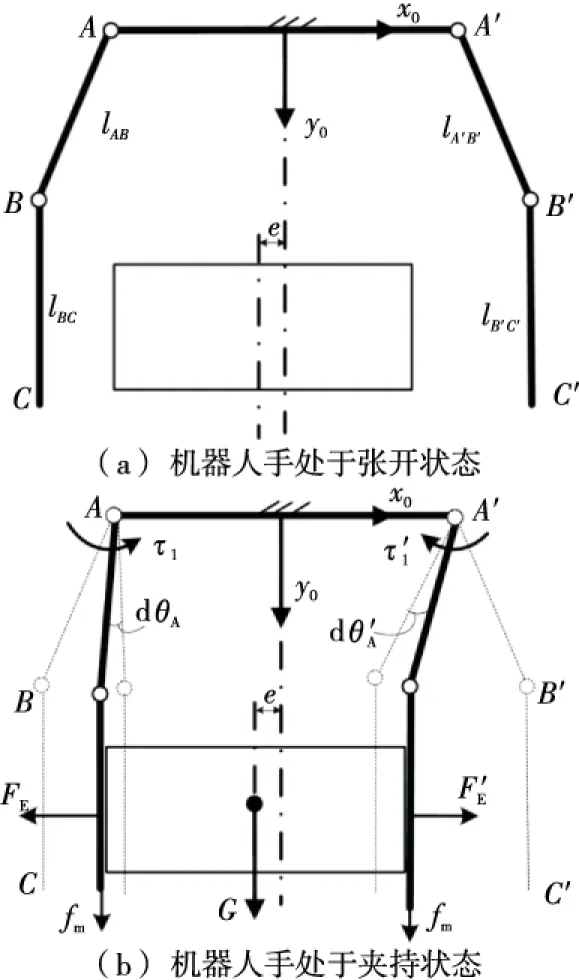
图5 包装盒位于机器人手的非中间位置时力学分析Figure 5 Mechanics modeling when the box is in thenon-intermediate position

根据图5所示,假设该机器人手的左手指先接触到食品包装盒,其左手指的末端杆BC上的夹持力仍可通过式(6)进行计算。综上,右侧手指上末端杆B′C′在水平和垂直方向上的虚位移分别为:
(8)
根据式(3)可知,右侧手指上末端杆B′C′的力平衡方程为
(9)
(10)
此时,式(10)可重写为
(11)
综上,右侧手指上末端杆B′C′上的夹持力
(12)
根据某生产线的夹持要求,给定机器人手的结构设计参数和夹持包装盒重量,即食品包装盒重1 kg,驱动力FD=200 N,恒力弹簧的回复力FS=50 N,杆的长度l=200 mm,大滑轮的半径R=15 mm。当包装盒位于中间位置时,两手指的夹持力FE随转角θA变化情况如图6所示。当包装盒位于图5所示的非中间位置时,两手指的夹持力FE随转角θA变化曲线如图7所示。
由图6和图7可知,该机器人手的两手指末端夹持力随转角的增大而增大。当包装盒处于中间位置时,该机器人手的左右两手指的末端夹持力相等。当包装盒处于非中间位置时,偏距e≠0。因此,当机器人手的左侧手指先接触到包装盒,且其末端的夹持力保持不变时,右侧手指的末端杆件还需继续移动偏距e,使得末端夹持力与左侧手指的末端夹持力相等。综上,该机器人手的两手指之间可实现自适应夹持运动,满足夹持要求。
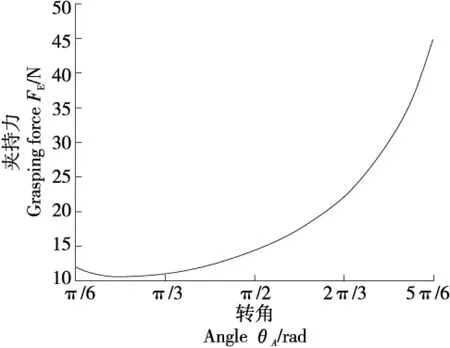
图6 包装盒位于中间位置时末端夹持力分析Figure 6 The grasping force analysis when the boxis in the middle position
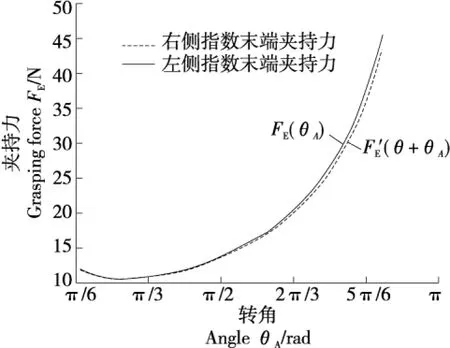
图7 包装盒位于非中间位置时两手指的末端夹持力分析Figure 7 The grasping force analysis when the boxis in the non-middle position
4 结论
基于绳轮传动提出了一种新型欠驱动机器人手,可用于生产线上不同尺寸的包装盒的夹持作业。通过机构组成和运动原理分析可知,该机器人手具有平行夹持运动模式,并且具有指间欠驱动特征,可通过一个电机驱动,实现对不同摆放位置的包装盒的夹持。综上,无论包装盒是否位于中间位置,该机器人手的两指夹持力能保证包装盒的有效夹持。试验只对该欠驱动机器人手的机构组成、欠驱动原理以及静力学进行了分析。为了更好地适应实际的工作环境,后续有必要搭建机器人手样机,并对其进行动力学分析和夹持试验分析。
猜你喜欢
物流技术与应用(2022年8期)2022-08-26
机械工业标准化与质量(2022年3期)2022-08-12
石油矿场机械(2022年3期)2022-06-17
小天使·一年级语数英综合(2021年8期)2021-08-17
物流技术与应用(2020年4期)2020-05-06
数学大王·中高年级(2020年2期)2020-03-13
学生天地(2019年36期)2019-08-25
汽车实用技术(2017年16期)2017-09-21
汽车实用技术(2015年8期)2015-12-26
小天使·三年级语数英综合(2015年5期)2015-06-06
