
大疆精灵4ProRTK无人机航测成图像控点密度与成果精度研究
2022-02-25 02:42郑嘉立
福建建筑 2022年1期
郑嘉立
(福建省建江水利水电设计咨询有限公司 福建福州 350001)
0 引言
无人机低空航测受天气和起飞场地条件影响小,效率高,获取的影像分辨率高,具有对地快速、实时调查和监测的能力,在土地工程领域有着广阔的应用前景[1]。在无人机低空航飞领域,普通小型多旋翼无人机作业在飞行时,因飞行姿态不稳定,飞行器自身携带的定位定姿系统定位精度不高,不能完全满足测绘精度需求[2]。因此,需要在航带附近布设较密的像控点,以保证像对的位置的正确性。而一块区域下来,如要控制测区整体精度,需要布设的像控点较多。在野外布设过大密度像控点,增加了外业工作量,拖延外业工期,同时也是外业过程中成本投入比较大的一个部分。进行内业处理时,过多的像控点处理也需要花费大量时间来进行,影响到作业的进度与效率。
带RTK小型多旋翼飞机具有自动化、智能化、专业化的特点,广泛地应用于水利监测、公安反恐、小范围的违法用地监测、高精度的地图数据采集等方面[4]。该机具有普通小型多旋翼无人机的优点,同时具有RTK导航定位、相机与RTK系统实现微秒级时间同步等功能,通过网络RTK模块提高了定位精度,可以减少野外像控点的布设密度,达到寡像控点无人机大比例尺地形测量作业的目的。
本文以大疆精灵4ProRTK和中海达高精度航测PPK套装为基础,以小面积违法用地测绘为例,在大比例尺航摄成图中像控点的密度对成图精度的影响进行探讨,以达到节省野外工作量、降低生产成本、提高生产效率的目的。
1 大疆精灵4proRTK作业流程
在大疆精灵4proRTK作业开始前,应先对测区进行全面踏勘,进行技术设计。根据航摄区域选择基站架设的位置,布设像控点用于提高空三精度,进行规划航线。对飞行器进行安装,检查飞行器的各项指标,设置好后,上传数据至飞行器,起飞进行外业采集。
外业结束后,进行数据归集,使用UAV-PPK解算每张像片的POS数据。计算好后,POS数据和图片导入PIX4D进行初始化、点云和纹理等一系列图形图像处理,把处理好的图形图像导入EPS三维成图软件进行成图。具体流程如图1所示。

图1 项目作业流程图
2 像控点布设密度与成图精度的探讨
2.1 测区概况
测区位于连江县潘度乡和江南乡,为带状地形,长约4000 m,宽约50 m,以丘陵为主,最大高差60 m。测区以连江纵二线104国道改线工程施工工地为主,本次测绘的目的是监测施工地违法占地的情况及绘制施工区内的数字线划图,坐标系采用2000国家大地坐标系,高程系统采用85高程系。
2.2 航测作业实施
2.2.1 像控点布设
带状测区正常情况需布设13至16个像控点,本研究中采用布设9个、6个以及3个像控点,属于寡像控点,均匀分布于测区起止及中央。像控点采用预制标靶板铺设地面上,或者采集明显线状地物交角。
2.2.2 像控点采集
利用福建省CORS系统直接采集2000国家大地坐标系,高程使用区域似大地水准面精化模型将采集的大地高转化成1985国家高程,每个点2次不同时间段独立采集,将两次的结果进行比较,其平面较差小于±3 cm,高程较差小于±5 cm。
2.2.3 架设基准站
基准站架设于测区中心位置的已知点上,该点上空无遮挡,周围无其他信号发射台,无大水面反射面,通视条件良好,可以很好地接收卫星信号。通过Hi-UAV软件,输入基站高,设置1秒的采样间隔,进行静态采集。
精灵 Phantom 4 RTK无人机通过机载GNSS系统和惯性测量装置IMU,获取在曝光瞬间航摄仪的位置信息以及姿态信息。把无人机获取的数据与地面站观测数据使用UAV-PPK进行联合后处理,从而获得每张像片的外方位元素。
2.2.4 图像采集
精灵 Phantom 4 RTK无人机起飞前,根据操作手册对无人飞行器进行设置。飞行器将进行自检。根据天气及测区地形地貌情况,进行航摄参数的设置,本次航摄地面分辨率为0.1 m,航摄相对航高100 m,航向重叠度为80%,旁向重叠度70%,航线尽量和平行短边,可以获得较多的航空影像。航线规划好后,上传数据至飞行器,等待无人机搜索到卫星可以定位返航点后,起飞作业。在采集过程中,可以通过移动终端实时查看影像状况。待飞行任务结束后,飞行器会自动返回起飞点。
2.2.5 图像数据处理
飞行结束后,将采集的影像和机载数据文件、拍照点时刻文件及基站数据文件导入计算机,将外业数据归集到一个数据文件夹中。通过目视检查,选取合格的影像数据。然后导入UAV-PPK软件解算每张的照片POS数据。将生成的POS数据文件导入Pix4D中,同时输入空三解算所需的参数信息,而后进行自动空三解算等一系列自动化操作,并自动生成质量报告。
根据飞行器飞行方向找出有像控点的照片,通过Pix4D用不同的刺点方案(9个、6个和3个像控点)对影像进行刺点。每个像控点应在5张照片中刺出点位。Pix4D软件采用光束法平差的算法自动进行相对定向和绝对定向,同时自动剔除粗差。空三成果如图2所示。

图2 空三示意图
待解算完成后,经点云和纹理及DSM、正射影像和指数的步骤处理,自动生成数字表面模型(DSM)如图3所示及正射影像图(DOM)如图4所示。
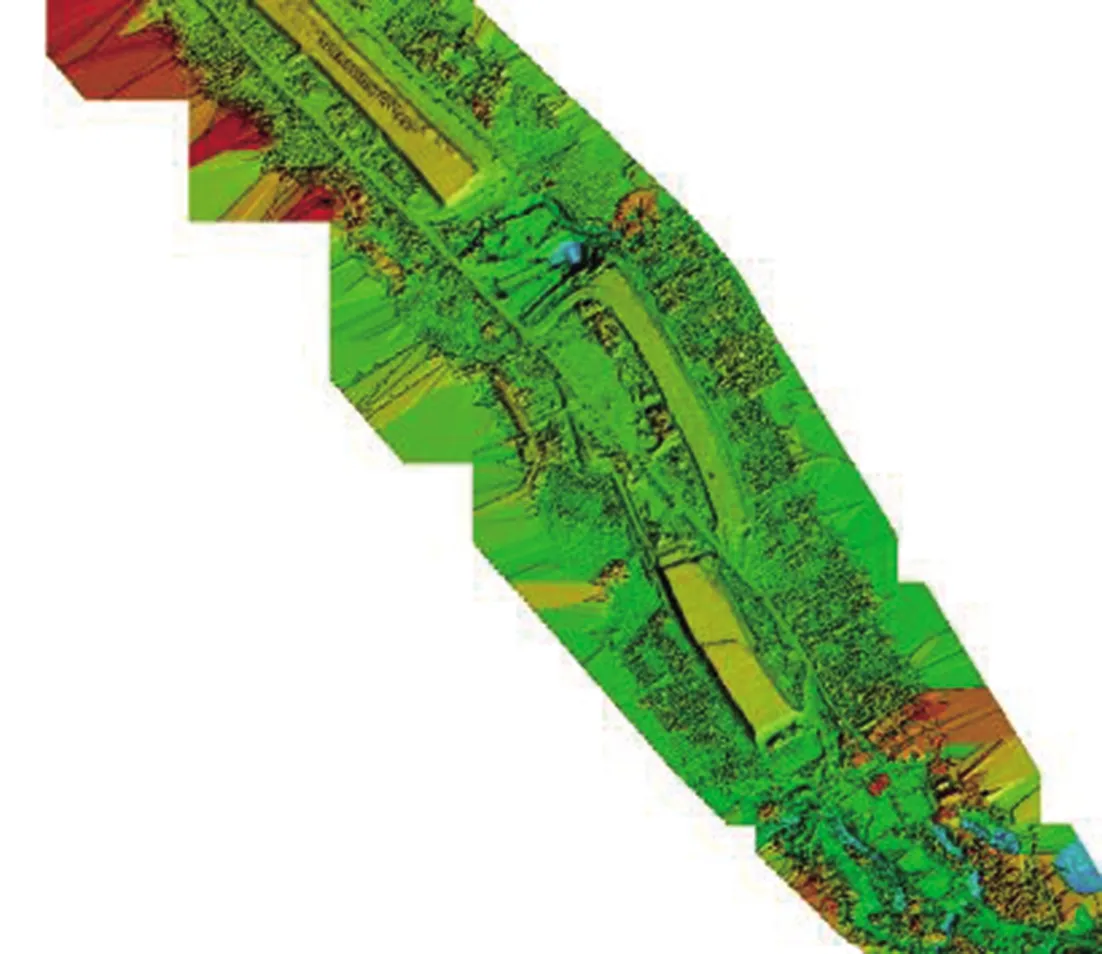
图3 数字表面模型示意图

图4 正射影像图示意图
2.3 精度评定
对航摄影像的质量检查及重叠度分析按常规进行,本文重点进行9个、6个和3个像控点条件下的成图精度分析。通过在生成的立体模型中量测检查点的三维坐标。用GNSS-RTK和全站仪对检查点进行野外实地进行实地测量,通过比对,分别检验检查点的平面精度和高程精度,检测用寡(少量)像控点进行航测成图的可行性。
检查点由多余的像片控制点及均匀分布于整个测区的明显的线状地物特征点构成。每种布点方案均选取20个同名检查点,进行外业实测坐标和高程,然后将其与在PIX4D输出的模型上量取的坐标和高程进行对比,以确定精度是否满足1∶1000测图的要求。
从表1中可看出,使用大疆精灵4ProRTK,搭配中海达高精度航测PPK套装,在野外减少布设像控点数量,对成图精度影响较小。将成果与《低空数字航空摄影测量内业规范》CCZ3003-2010中规定1∶1000成图时,检查点误差的平面位置为1.0 m,高程为0.4 m,及《1∶500 1∶1000 1∶2000地形图航空摄影测量数字化测图规范》(GB/T15967-2008)中规定,内业加密点对最近野外控制点的图上点位中误差的平面中误差不得大于0.4 mm, 地物点对最近野外控制点的图上点位中误差的平面中误差不得大于0.6 mm。内业加密点对最近的野外控制点的高程中,误差丘陵地不得大于0.35 m进行比较。经比较,本次测图可以满足规范对1∶1000比例尺成图要求。通过本试验区测算,进行1∶1000比例尺成图,可以间隔900 m~1200 m布设一个像控点。野外像控点的布设数量比普通无人机像控点减少70%左右,节省了大量的外业时间,降低了外业的劳动强度。经本次成图发现,使用PPK后处理软件解算POS数据,加上地面少量像控点进行成图的方法,由于减少了大量的人工刺点的工作,提高了内业的工作效率。
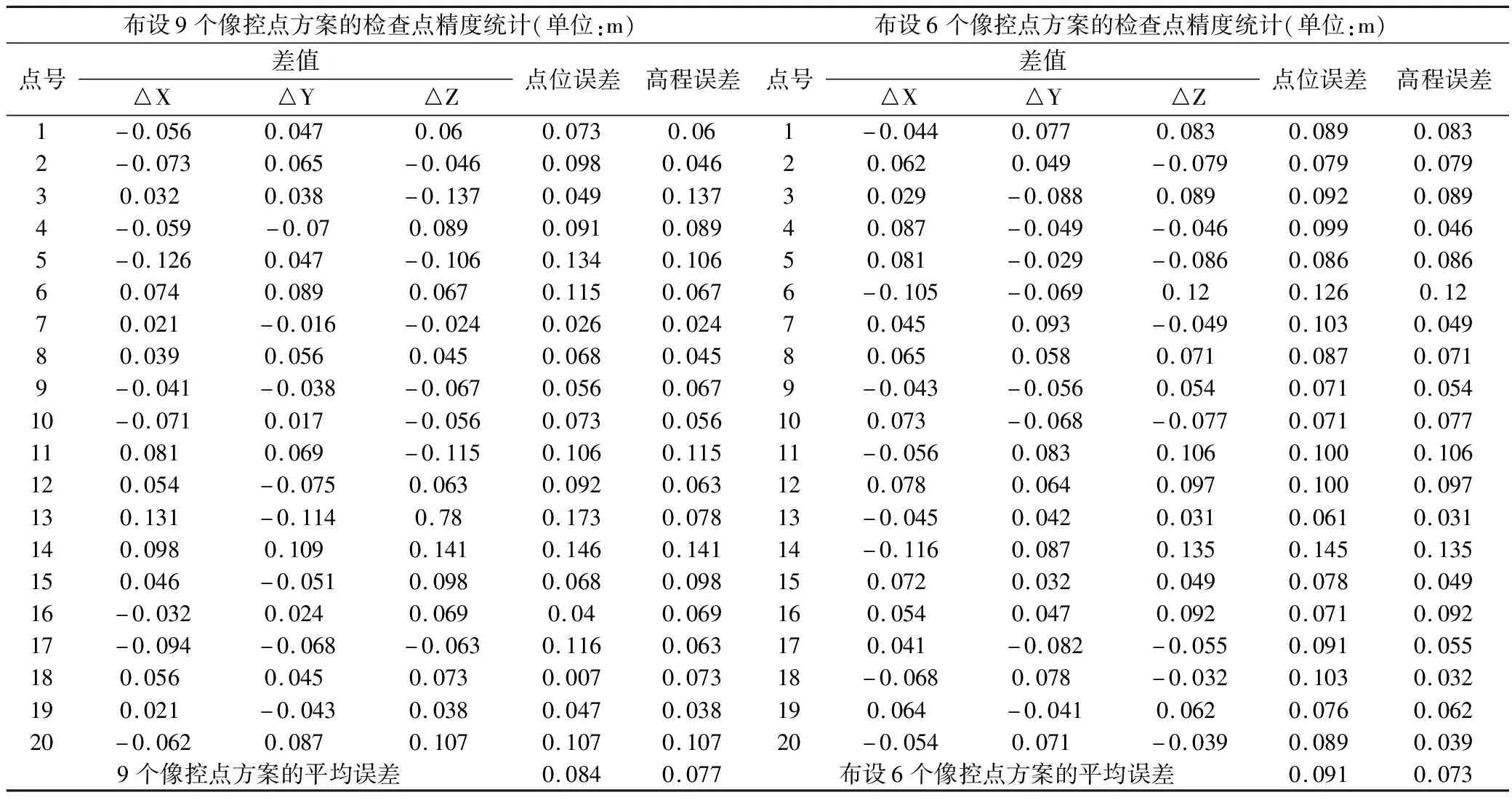
表1 布设9个、6个、3个像控点方案的检查点精度统计
2.4 地形绘制及施工地违法占地的情况分析
将Pix4D生成的成果导入清华三维地理信息工作站(EPS)中,对影像进行切片工作(生成垂直影像),加载垂直模型,并加载超大影像等一系列处理后,将野外测得被遮挡的地物特征点展绘到CAD中,生成DWG的文件,导入EPS中。在EPS中选择对应的编码进行房屋,桥墩等各种地物的绘制,同时绘制施工用地范围线。高程采用EPS中提取结合野外实测点的方式生成。图形绘制完成后,运行EPS脚本,输出CASS格式的图形。在CAD中根据成图要求,对图形进行整饰成图(图5),将绘制好的施工用地范围线与审批的施工用地红线进行套合,分析施工期间是否违法占用土地。经过分析,施工期间,部分地方超出用地红线范围。

图6 数字线划图(DLG)示意图
3 结语
在传统的航摄作业方式中,设置像控点是外业过程中最费时费力的环节。以本次测区为例,像带状的地形,传统的测量方式需人工布设 13-16 个像控点。由于地形原因部分像控点布设具有一定难度,而使用精灵 Phantom 4 RTK搭配中海达PPK套装的测量方案,就可解决这类问题,使作业效率得到了大幅的提升。带RTK的低空多旋翼无人机在基站选址合理,在外业只需布设少量的控制点,且像片质量、像片重叠度等航摄参数设计合理的情况下,通过UAV-PPK软件进行解算,能获得高精度的POS数据,可以满足小范围大比例尺测图需要。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14
计算机系统应用(2022年4期)2022-05-10
天津医科大学学报(2021年4期)2021-08-21
河北地质(2021年4期)2021-03-08
西部交通科技(2021年9期)2021-01-11
中国铁道科学(2019年5期)2019-10-19
国际呼吸杂志(2019年4期)2019-03-12
智能建筑与智慧城市(2018年11期)2018-11-28
测绘通报(2018年10期)2018-11-02
中国资源综合利用(2017年2期)2018-01-22
