半车模型主动悬架的遗传算法优化PID控制策略
2023-03-26 14:24尹宗军苏蓉马学刚黄自成李月城
景德镇学院学报 2023年6期
尹宗军 苏蓉 马学刚 黄自成 李月城


摘 要:为满足不同车辆和路况的需求,悬架系统的控制技术随着汽车工业的发展不断创新和改进。选取车身垂直振动加速度、俯仰角加速度、悬架动挠度和轮胎动位移这四个指标构建了遗传算法的适应度函数,设计了一种基于遗传算法优化的主动悬架PID控制器,然后在Matlab/Simulink仿真软件平台上构建了悬架动力学模型和路面模型,通过对比被动悬架分析了遗传算法优化PID控制器的控制效果。仿真结果表明,在连续过减速带路面下各悬架性能均方根的平均优化率达到5%以上,而在随机路面下各悬架性能均方根的平均优化率达到20%以上。
关键词:半车模型;主动悬架;遗传算法;PID控制
中图分类号:U463.33 文献标识码:A 文章编号:2095-9699(2023)06-0056-07
汽车是现代社会最重要的交通工具之一,汽车的驾驶和乘坐体验受到越来越多的关注。目前汽车悬架根据是否具有控制功能可分为被动悬架和主动悬架[1-2]。被动悬架对于汽车而言存在一定的局限性,因为其各组成部件的参数是固定的,无法根据实时状况进行调整。为了提高汽车的乘坐舒适性和行驶安全性,解决被动悬架系统的不足,主动悬架系统及其控制技术受到越来越多的关注,并开始应用到实际当中[3]。
主动悬架技术研究是改善车辆整体性能的基础课题之一,该研究领域国内外有不少学者不断进行探讨。对控制算法进行优化是使主动悬架能够实现理想减振的核心问题。孙浩杰[4]为减振器建模方法提供一种新思路,尝试利用强化学习方法对半主动悬架连续阻尼控制策略进行学习,并应用于悬架实验台以对其效果进行验证。许春妞[5]设计了一种基于LQR(Linear Quadratic Regulator)控制的整车混合电磁主动悬架切换控制策略。曹瑞丽[6]以1/4车辆主动悬架为研究对象,进行主动悬架H∞/广义H2 控制研究。朱志远[7]结合天棚惯容悬架以及天棚阻尼悬架的特点,提出一种双天棚控制策略及其半主动实现方案,以期解决现有半主动控制悬架不能同时适应载荷和路况的问题。上官郑伟[8]以七自由度汽车的半主动悬架系统为研究对象,提出了粒子群优化的SH-ADD(Skyhood-Acceleration Driving Damper)算法,对四个磁流变减振器进行了协调控制,较好地解决了汽车平顺性差的问题。李韶华等[9]探究了轮毂电机质量对悬架的影响,针对分布式驱动电动汽车的主动悬架提出了一种T-S(Takagi-Sugeno)模糊控制策略。Robert et al.[10]针对主动悬架提出了无模型智能自适应模糊控制器。Kasemi et al.[11]对PID(Proportion-Integral-Differential)控制器进行了整定和仿真,将其受控输出与非受控输出进行比较,并且利用自己设计的模型控制器可以控制MR(Magneto-Rheological)可变阻尼输出来控制车辆的振动。
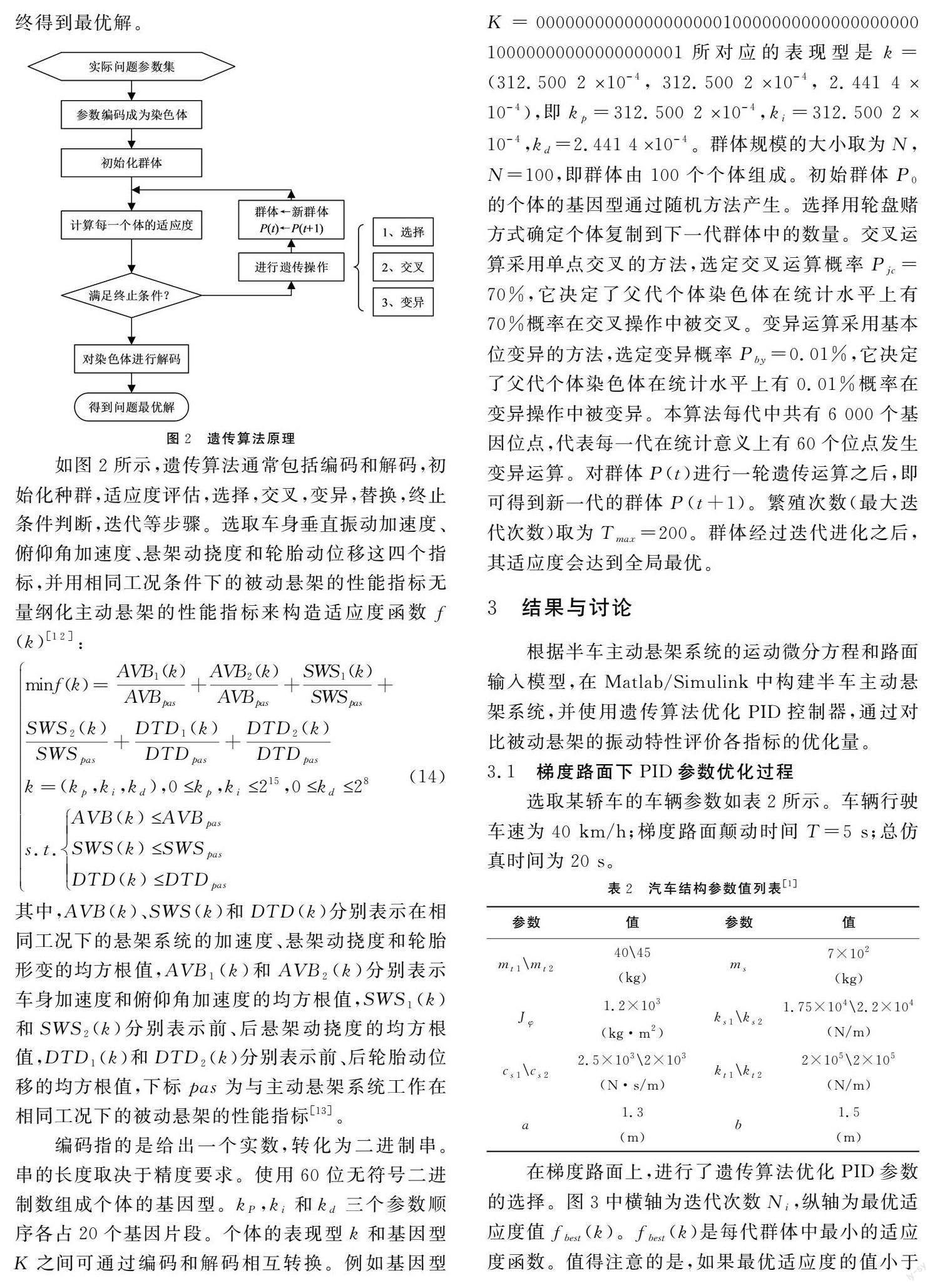
基于此,通过建立悬架动力学数学模型,在Simulink下搭建仿真模型,在梯度路面下开展基于遗传算法优化PID 控制的悬架特性研究,对连续过减速带路面和随机路面进行平顺性分析。
在梯度路面上,进行了遗传算法优化PID 参数的选择。图3中横轴为迭代次数Ni,纵轴为最优适应度值fbest(k)。fbest(k)是每代群体中最小的适应度函数。值得注意的是,如果最优适应度的值小于6,则可以判定主动悬架的性能指标要优于被动悬架的性能指标。从图3中可以看出,梯度路面上在第25代左右,群体达到最优化。
综上,经过多次的遗传迭代,遗传算法优化PID控制器中比例放大系数kp 取1 662.699 1,积分系数ki 取14.649 3和微分系数kd 取10.0。
3.2 连续过减速带路面下主动悬架动态特性
连续过减速带路面模型在前10秒内为连续过5个减速带,后10秒为平坦路面。图4为连续过减速带路面下被动悬架系统与主动悬架PID 控制系统的各悬架性能仿真结果对比图。表3显示了连续过减速带路面下各悬架性能均方根的对比。根据表3中的数据可知,采用优化的主动悬架PID 控制策略相比于被动悬架控制策略可以使车身垂向加速度提高31%,车身俯仰角加速度提高41%,前、后轮轮胎动位移分别提高5.4%和8.7%,前、后悬架动挠度分别提高4.6%和7.8%。
3.3 随机路面下主动悬架动态特性
图5为随机路面下被动悬架系统与主动悬架PID控制系统的各悬架性能仿真结果对比图。根据图5,可以明显看出采用主动悬架PID控制策略时,车身垂向加速度波动范围为眀3.699~3.870 m?s-2,车身俯仰角加速度波动范围为眀4.030~3.591rad?s-2,前悬架动挠度的波动范围为眀2.719 堅10-2~1.53堅10-2 m,后悬架动挠度波动范围为眀2.205堅10-2~1.865堅10-2 m,前轮轮胎动位移波动范围为眀1.552堅10-2~3.044堅10-2 m,后轮轮胎动位移波动范围为眀1.859 堅10-2 ~2.551 堅10-2 m。根据表4中的数据,采用优化的主动悬架PID 控制策略相比于被动悬架,可以使车辆在随机路面下的性能得到显著提升。具体来说,车身垂向加速度可以得到71%的優化,车身俯仰角加速度可以得到20%的优化,前、后轮轮胎动位移分别可以得到23%和29%的优化,前、后悬架动挠度分别可以得到33%和35%的优化。
4 结论
使用MATLAB/simulink 建立了半车主动悬架数学模型和路面输入模型。通过综合车身垂直加速度、车身俯仰角加速度、轮胎动位移和悬架动挠度,建立了PID 控制的目标性能参数,进行了PID控制策略的主动悬架动态特性仿真研究,并利用遗传算法在梯度路面上对PID 控制器的参数进行了优化选择。悬架在连续过减速带路面和C 级随机路面下的动态特性表明,应用遗传算法优化好的PID控制参数的主动悬架系统相对于被动悬架系统在悬架性能上得到了有效提高,能改善车辆行驶的平顺性。
参考文献:
[1]李振兴.基于半车模型的主动悬架控制策略研究[J].机械设计与制造工程,2018,47(4):66-69.
[2]李杰,贾长旺,成林海,等.脉冲路面下电动汽车主动悬架状态反馈H∞ 控制[J].湖南大学学报(自然科学版),2022,49(8):12-20.
[3]詹长书,苏立庆.基于粒子群优化的主动悬架PID控制策略[J].科学技术与工程,2022,22(10):4180-4186.
[4]孙浩杰.基于强化学习的半主动悬架控制算法研究[D].长春:吉林大学,2022.
[5]许春妞.基于LQR控制的整车混合电磁主动悬架切换控制研究[D].镇江:江苏大学,2021.
[6]曹瑞丽.主动悬架H∞/广义H2 控制研究[D].长春:吉林大学,2021.
[7]朱志远.双天棚半主动悬架控制策略设计及半实物仿真[D].镇江:江苏大学,2021.
[8]上官郑伟.汽车磁流变半主动悬架控制策略研究[D].北京:北京交通大学,2021.
[9]李韶华,张培强,冯桂珍,等.分布式驱动电动汽车主动悬架T-S模糊控制研究[J].力学与实践,2023,45(1):22-32.
[10]Robert J, Kumar P, Nair S, et al. Fuzzy control ofactive suspension system based on quarter car model[J].Materials Today: Proceedings,2022,66:902-908.
[11]Kasemi B, Muthalif A G, Rashid M, et al. Fuzzy-PIDcontroller for semiactive vibration control usingmagnetorheological fluid damper [J].Procedia Engineering,2012,41:1221-1227.
[12]Liu Z, Ren H, Chen S, et al. Feedback linearizationkalman observer based sliding mode control for semi-activesuspension systems[J].IEEE Access,2020,8:71721-71738.
[13]許伟,高远.基于遗传算法的汽车主动悬架LQR控制研究[J].计算机与数字工程,2019,47(9):2212-2216.
责任编辑:肖祖铭
猜你喜欢
测控技术(2018年2期)2018-12-09
石油地球物理勘探(2017年2期)2017-11-23
中央民族大学学报(自然科学版)(2017年1期)2017-06-11
统计与决策(2017年2期)2017-03-20
山东工业技术(2016年23期)2016-12-23
教育界·下旬(2016年8期)2016-12-14
科学与财富(2016年26期)2016-12-01
湖南城市学院学报(自然科学版)(2016年2期)2016-12-01
企业技术开发·中旬刊(2016年10期)2016-11-12
科技视界(2016年6期)2016-07-12