基于自平衡的林间竹子独轮搬运车的设计
2023-05-30 10:48李晓晓母银飞孙付春杨涛龚一龙董万福
成都大学学报(自然科学版) 2023年1期
关键词:竹材
李晓晓 母银飞 孙付春 杨涛 龚一龙 董万福

摘 要:利用现代设计方法学完成林间竹子搬运车的初步功能方案设计,再通过有效值分析法获得最佳设计方案.完成竹子独轮搬运车的行走装置、搭载平台和平衡调节装置的结构设计后,还进行了搬运车自平衡控制系统的设计与运动仿真分析.基于自平衡的林间竹子独轮搬运车的设计,能有效地解决目前竹子搬运工具的通过性和平衡性差的问题,提升了运输效率、减轻了劳动强度,具有良好的开发前景.
关键词:竹材;现代设计方法学;搬运车;有效值分析法;自平衡
中图分类号:S776.361
文献标志码:A
0 引 言
我国竹林资源大多分布在地势复杂的丘陵地区,竹林间基本上都是崎岖的林间路,道路窄小、路面状况复杂,而且林间路坡度大、拐弯多且急[1],该路况基本无法使用中型和大型的运输机械来搬运物资,林间竹子的搬运大多使用手推车、两轮和三轮摩托车来搬运.基于地形和路面情况的复杂,尤其是下雨过后山间道路泥泞且很滑,一般的手推车很难控制速度[2],两轮的摩托车又很难控制平衡,而三轮摩托车转向时容易发生侧翻,总之,现有的搬运工具实用性低,竹材运输需要投入大量的人力.基于目前竹材搬运车机械的自动化、智能化程度低,通过性和平衡性不可兼顾[3],因此,本研究制作出一款适合在丘陵山地复杂的林间道路上作业且可自动调节平衡的小型独轮搬运车,以克服目前竹材搬运车的不足.
1 竹林间竹子搬运车方案设计
1.1 搬运车的设计任务
通过对竹子生长环境和搬运路况的考察,结合具体使用情况和现代设计方法学原则[4],竹子搬运车具体的要求明细见表1.
1.2 总功能分解
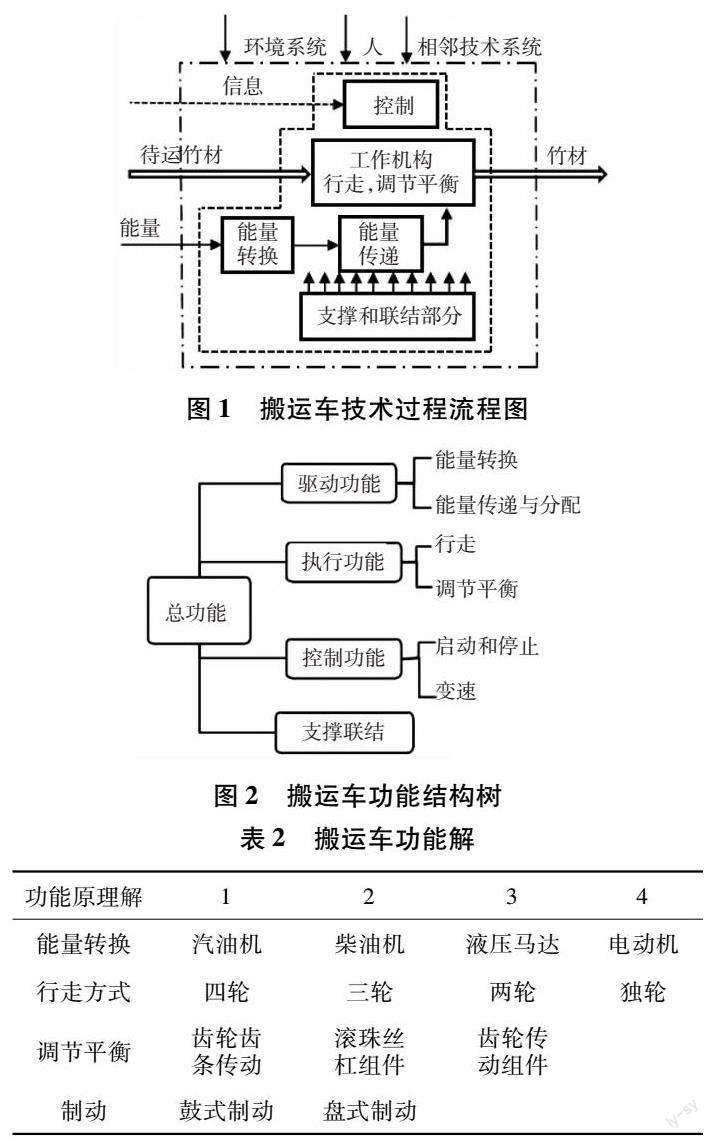
竹林间竹子搬运车的总功能是对竹林间的竹子实现短距离的运输,并且能够在行驶过程中实现自动检测并调节车体左右2侧平衡.为了清楚地表示竹林间搬运车各工作部分和周围环境的工作关系,建立了如图1所示的独轮搬运车技术过程流程图.流程图中,环境系统是指丘陵山地的竹林环境,相邻技术系统是指搬运车对能源和控制等的技术要求,图中点划线表示机械系统与外部的联系.
为了更直观地了解竹林间搬运车系统各部分的功能,将系统的总功能分解为简单的功能元,并建立如图2的搬运车功能树.搬运车总功能具体分为驱动功能、执行功能、控制功能和支撑联结部分.
1.3 原理方案解
根据搬运车功能树,采取系统组合的方法,建立起搬运车组合的形态矩阵,将其可能的方法进行列举排列,计算出解法,并在所有的解法中找出符合项目实际意义的方案.搬运车所有形态矩阵见表2.
由表2可知,当不考虑实际工作环境和其他条件制约的情况下,能得到的方案一共有4×4×3×2=96种方案.
1)能量转换.丘陵地区竹林间的竹子运输对生态环境的保护是必须首要考虑的问题,首先考虑使用电动机作为驱动源.交流电动机在竹林中使用会造成诸多的不方便,初步考虑使用直流电动机作为驱动源.
2)行走方式.对于竹林间的道路而言,四轮、三轮和两轮的搬运车都存在通过性差的问题,相比较之下独轮车拥有较好的通过性.
3)制动方式.盘式制动的制造成本会比鼓式的更高,但是鼓式构造零件多,不利于后续的维修,盘式刹车构造简单,维修更容易,初步选用盘式制动.
综上所述,初步制定了3种搬运车的设计方案.
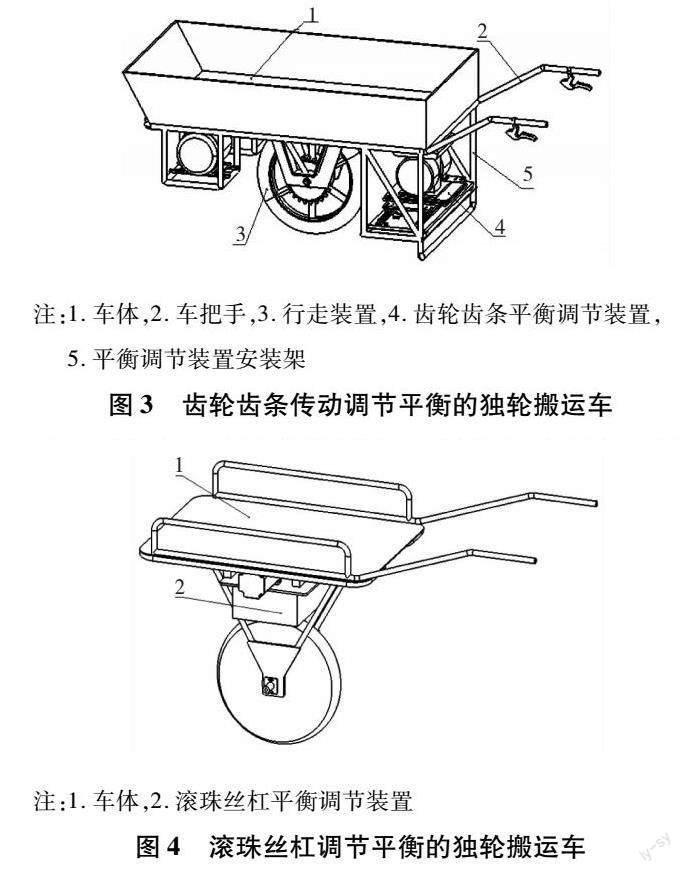
方案1:使用直流电机的齿轮齿条传动调节平衡的独轮搬运车如图3所示.其主要包括车体、车把手、行走装置、齿轮齿条平衡调节装置、平衡调节装置安装架和控制器.此方案通过控制把手对行走轮的运动状态进行调控;通过刹车把手停止行走轮;当检测到车体不平衡时,通过平衡调节装置对车体进行平衡调节;当车体有向左倾斜的趋势时,则由伺服电机控制齿轮向右运动,从而带动整个滑板向右运动,最后使车体重新恢复平衡;当车体有向右倾斜的趋势时,则由伺服电机控制齿轮向左运动,从而带动整个滑板向左运动,最后使车体重新恢复平衡.
方案2:使用直流电机的滚珠丝杠调节平衡的独轮搬运车如图4所示.其主要包括车体、行走装置和滚珠丝杠平衡调节装置.此方案通过控制车体上的把手对行走轮的运动状态进行调控;当检测到车体不平衡时,通过滚珠丝杠平衡调节装置对车体进行平衡调节;当车体有向左倾斜的趋势时,则由伺服电机控制滚珠丝杠向右运动,从而带动整个平衡调节装置向右运动,最后使车体重新恢复平衡;当车体有向右倾斜的趋势时,则由伺服电机控制滚珠丝杆向左运动,从而带动整个平衡调节装置向左运动,最后使车体重新恢复平衡.
方案3:使用直流电机的齿轮传动组件调节平衡的独轮搬运车如图5所示.其主要包括行走装置、搭载平台和齿轮传动组件平衡调节装置.此方案通过控制车体上的把手对行走轮的运动状态进行调控;当检测到车体不平衡时,通过齿轮传动组件平衡调节装置对车体进行平衡调节;当车体有向左倾斜的趋势时,则由直流减速电机控制齿轮传动组件带动配重向右摆动,从而使整个重心向右偏移,最后使车体重新恢复平衡;当车体有向右倾斜的趋势时,则由直流减速电机控制齿轮传动组件带动配重向左摆动,从而使整个重心向左偏移,最后使车体重新恢复平衡.
1.4 设计方案的评价与选择
有效值分析法是系统工程学最重要的评价方法之一,根据系统论观点,有效值分析法把待评价的目标看成1个系统,由于系统可以分解,于是可以把总评价目标拆分成多个级别的分目标,整体呈现出一个树状结构,也就是目标树.例如,Z为总目標,Z1和Z2为第1级分目标,Z11和Z12为Z1的分目标,即Z的第2级分目标,Z111和Z112为Z11的分目标,即Z的第3级分目标,最末级的分目标即为总目标的具体评价目标,即评价标准.建立评价目标树时应选择起决定作用的设计要求和条件作为主要目标,各个目标之间应相互独立.每个评价标准在总的评价目标中有着不一样的重要性,通常把重要程度用加权系数表示,加权系数通常用0~1之间的数来表示,最终每个分目标的加权系数等于1.搬运车的评价目标树和加权系数如图6所示.
2 自平衡独轮搬运车结构设计
自平衡独轮搬运车主要包括行走装置、搭载平台和平衡调节装置3部分.其中,行走装置主要包括行走轮、行走轮安装架、车架和控制把手等;搭载平台主要指的是安装在搬运车行走轮两侧的载物框;平衡调节装置主要包括直流减速电机、电机安装架、齿轮传动组件、配重电池和电池安装架等.自平衡独轮搬运车的主要设计参数见表4,整体结构如图7所示.
2.1 行走装置的设计
自平衡独轮搬运车的行走装置主要包括行走轮、行走轮安装架、车架和控制把手等.使用环境决定着行走轮的选用,土壤的承载能力影响行走轮的宽度,路面的状况影响行走轮的大小[5].车架是行走装置的基础部件,搭载和固定连接着整个独轮搬运车所有必需的零部件.搬运车在行驶过程中和搭载货物受到外界作用力时,所有的作用力都只能由车架来接收和传递.竹农通过车架上的车把手对行走轮的状态进行控制,右车把手上的手柄控制车速,左把手上的手柄控制搬运车的启停.行走装置的三维结构如图8所示.
2.2 搭载平台的设计
自平衡独轮搬运车主要是用于林间竹材运输,竹材的密度是随着生长的时间而有所差异的,本研究针对的竹材为生长期超过3年的竹材,由研究报告可知,该类竹子的密度大约为1.16 g/cm3,竹材的主干高度通常为6~12 m,竹子的直径大小在40~90 mm之间[1].选择中间的数据作为初步估算的依据,选取主干为10 m,竹子直径为70 mm.根据搬运车整体设计的要求,将竹材截切为900 mm长的小節,根据竹子的密度和直径估算每1小节竹子重2 kg左右,1根竹子的重量约22 kg,单个装满竹材的竹材框的重量小于50 kg.根据竹材的物理特性,竹材框的尺寸为920 mm×220 mm×290 mm.竹材框上的边框连板为可以旋转设计,目的是卸载竹材时,竹农可以手动把搭挂在边框连板上的连接板挪动,此时边框连板放下,则竹材便可以从竹材框中卸载下来.竹材框的三维结构如图9所示.
2.3 平衡调节装置设计
2.3.1 平衡调节装置设计
平衡调节装置用于调节车体的平衡.当传感器检测到车体倾斜的信息后,将信号传递给控制系统,这时控制系统启动平衡调节装置当中的直流减速电机,当电机接受到来自于控制系统的信号后,电机开始工作,同时带动装置中的电机齿轮转动,从而带动回转齿轮一起运动.由于配重电池和回转齿轮是通过螺栓连接在一起的,当回转齿轮转动时,与其连接的配重电池配重也会随之一起运动,利用配重电池的重量在一定程度上逐渐抵消掉车体倾斜的重量,在一定程度上重新调节车体的重心.电机齿轮如此左右循环往复运动,使车体保持动态平衡状态.平衡调节装置的三维结构如图10所示.
2.3.2 控制系统设计
1)自平衡原理.电动独轮搬运车主要存在前后左右4个方向的平衡问题.通过分析可知,搬运车前后2个方向的平衡主要通过竹农来手动平衡,而自平衡指的是独轮搬运车左右2边的平衡.当控制器检测到车体的倾斜信号时,控制独轮搬运车平衡调节装置中的直流减速电机,使平衡调整装置向相反的方向摆动,从而平衡掉独轮搬运车的倾倒趋势,以此保持独轮搬运车的动态平衡.自平衡独轮搬运车的车体左右倾斜与其车轮的转动是互相独立的,同时使用者手扶车把手,把握车体前后的平衡.当车体向左倾斜时,则通过控制直流减速电机驱动平衡调节装置中的齿轮向右运动以保持车体平衡;当车体向右倾斜时,则通过控制直流减速电机驱动平衡调节装置中的齿轮向左运动以保持车体平衡;当车体保持平衡状态时,直流减速电机不工作.以此往复循环,使独轮搬运车始终保持动态平衡状态.
2)主程序流程图设计.主程序中先对各个模块进行初始化设置,然后根据芯片所要实现的功能,对主程序进行编写.自平衡独轮搬运车最主要的目标就是实现小车的平衡控制.当控制器接收到平衡传感器的信号后,输出脉冲到直流减速电机,使其控制平衡调节装置左右运动.通过控制器对车体的平衡状态进行判断,当检测到车体处于不平衡状态时,启动平衡调节装置当中的直流减速电机,通过摆动电池配重来调整搬运车重心,当搬运车的车体恢复平衡时,直流减速电机停止工作,当车体不平衡时再重新启动,以此循环往复,使独轮搬运车一直处于一种动态平衡之中.
2.3.3 平衡调节装置的运动仿真分析
平衡调节装置是搬运车自动调节平衡的关键部件,依靠齿轮传动来带动配重电池的运动,从而使搬运车的车体偏移时的整体重心得到一定程度的调节.对平衡调节装置做相应的运动分析,是衡量该装置设计合理性的一个重要实验过程,可以了解模型在运动过程中的变化规律,让平衡调节装置在搬运车的行驶过程中,能够具有更好的稳定性与可靠性.将建立的三维模型从Solidworks中另存为x-t的中间通用格式,将其导入到ADAMS软件中,在各零部件位置添加相关的条件约束与对应的载荷作用,得到平衡调节装置的边界条件施加图如图11所示.
当所有的约束添加完成过后,对电机的输出轴进行一个旋转驱动的添加,平衡调节装置中直流减速电机的转动速度为665 r/min.在该装置中,电机安装架中的电机轴与回转齿轮安装轴都是固定不动的,即设置为固定副,电机齿轮和回转齿轮分别围绕着电机轴和回转齿轮安装轴做回转运动,即都为转动副.齿轮在运动过程中经过计算时间为2.5 s,即设置仿真的时间为2.5 s,得到回转齿轮的位移如图12所示,回转齿轮的质心速度变化如图13所示,回转齿轮的质心加速度如图14所示.
由图12~图14可知,在搬运车的行驶过程中,平衡调节装置中回转齿轮的移动位移随着速度减小而逐渐缩小,加速度逐渐增加,但运动范围处于设计的合理范围之内,符合自平衡独轮搬运车实际的工作过程规律.
3 结 论
竹资源的生长环境比较复杂,给竹材的运输带来了诸多困难.基于自平衡的竹林间竹子独轮搬运车,专门用于丘陵地区竹林间的竹材运输.利用机械设计方法学的设计理论,对独轮搬运车的各部分进行了功能元求解,通过有效值分析法对3个初步方案进行评价,得到竹林间竹子独轮搬运车的最佳方案,完成了行走装置、搭载平台和平衡调节装置的设计,后期还需要样机制作和实验.随着智慧农业和精准农业的不断发展,林竹运输将继续向自动化和智能化方向快速发展,无人操作的农业机器人是农业发展的必然趋势.
參考文献:
[1]李晓晓,王茂安,杨涛,等.手持式竹林采伐机设计[J].成都大学学报(自然科学版),2020,39(2):199-203.
[2]林玉新.一种斜坡上可调节平衡的小推车[J].中国科技信息,2019,31(17):66-67.
[3]刘冰.一种新型农用单轮手推车:CN211281053U[P].2020-08-18.
[4]李梅芳,赵永翔.TRIZ创新思维与方法:理论及应用[M].北京:机械工业出版社,2016.
[5]鲍玉冬,杨杰,赵彦玲,等.基于轮壤接触力学行为的蓝莓采收机行走驱动系统设计[J].农业工程学报,2020,36(7):43-52.
(责任编辑:伍利华)
Abstract:
Modern design methodology is used to complete the preliminary functional design of the bamboo carrier in the forest,and then through the effective value analysis method,the best design scheme is obtained.After completing the structural design of the walking device,carrying platform and balance adjustment device of the single wheel bamboo carrier,the design and motion simulation analysis of the self balance control system of the carrier are also carried out.The design of forest bamboo single wheel carrier,based on self balance,can effectively solve the problems,such as poor trafficability,poor balance in current bamboo handling tools and so on.Therefore,the design can also improve transportation efficiency,reduce labor intensity,and have a good development prospect.
Key words:
bamboo;modern design methodology;carrier;effective value analysis method;self balance
猜你喜欢
农药学学报(2023年4期)2023-09-03
林业工程学报(2022年4期)2022-08-03
湖北农业科学(2022年8期)2022-05-23
林产工业(2021年10期)2021-11-03
竹子学报(2021年1期)2021-10-29
林业工程学报(2021年3期)2021-05-31
林产工业(2020年8期)2020-02-28
世界竹藤通讯(2019年5期)2019-02-11
工业设计(2016年8期)2016-04-16
大众文艺(2015年15期)2015-07-12