
基于差分进化算法下肢康复机构的优化设计
2023-10-11 09:00朱立红张金龙仲佳俊
合肥工业大学学报(自然科学版) 2023年9期
朱立红, 张金龙, 仲佳俊, 曹 宇
(合肥工业大学 机械工程学院,安徽 合肥 230009)
我国人口基数大,人口老龄化问题日益严重,2021年老年人口为2.6亿,占比高达18.7%,而老年人中风所致的偏瘫人数也不断增加[1]。对于这类病人,现代家庭结构不适合传统的长期、高额的康复治疗,而下肢康复机构可以很好地补充这一不足[2]。目前,国外对下肢康复机构的研究已经迈入比较成熟的阶段,产品已面向市场,但由于引进成本高,不适合我国现有国情。我国下肢康复机构的研究起步较晚,虽然已取得了很大进展,但大多产品功能单一、结构复杂、运动不平稳以及精度较低,不利于市场推广。因此,研究功能全面、结构简单的下肢康复机器人,提高下肢康复机器人的平稳性和运动轨迹精度具有重要意义。
目前,常见的下肢康复机器人可以分为卧姿、坐姿、站姿3种,康复医学与机器人结合的康复机器人技术正逐渐成为国内外研究的热点。近年来欧美国家在下肢康复机器人的研究中取得了不少成果,代表性的产品有瑞士Hocoma AG研发的Lokomat[3]、日本的Robot Suit HAL[4]、美国的Litegait[5]和eLEGS[6]。这类康复训练机器人一般包括步行矫正器、体重支撑系统和步行台,主要用于患者中期和后期的步态康复训练,具有较好的医疗效果;但使用这些仪器患者躯干被束缚悬挂,上体活动受限,且舒适性差,价格昂贵。近几年国内越来越多的院校和科研机构对康复设备进行研究,并取得了一系列研究成果。哈尔滨工业大学对功能性电刺激的蹬车训练和上肢康复设备进行了研究[7-8];清华大学、上海大学对悬挂式下肢康复机器人进行了较为深入的研究[9-10];哈尔滨工程大学、燕山大学对坐卧式下肢康复机器人开展了研究[11-12];浙江大学、中国科学院合肥智能机械研究所和中国科学技术大学对穿戴式下肢康复训练机器人进行了研究[13-14]。
基于上述研究和分析,本文以下肢康复机器人为研究对象,利用INVENTOR软件设计下肢康复机器人的模型,采用差分进化算法对其进行优化,以解决下肢康复机器人速度突变和运动不平稳的问题。
1 问题描述
1.1 机构模型
下肢康复机器人包括减重装置和下肢康复机构。下肢康复机构由四杆机构组成。本文模型基于第50百分位人体尺寸,兼具一定的调节能力,适用于大部分人体尺寸[15-16]。
下肢康复机器人数字样机模型如图1所示。
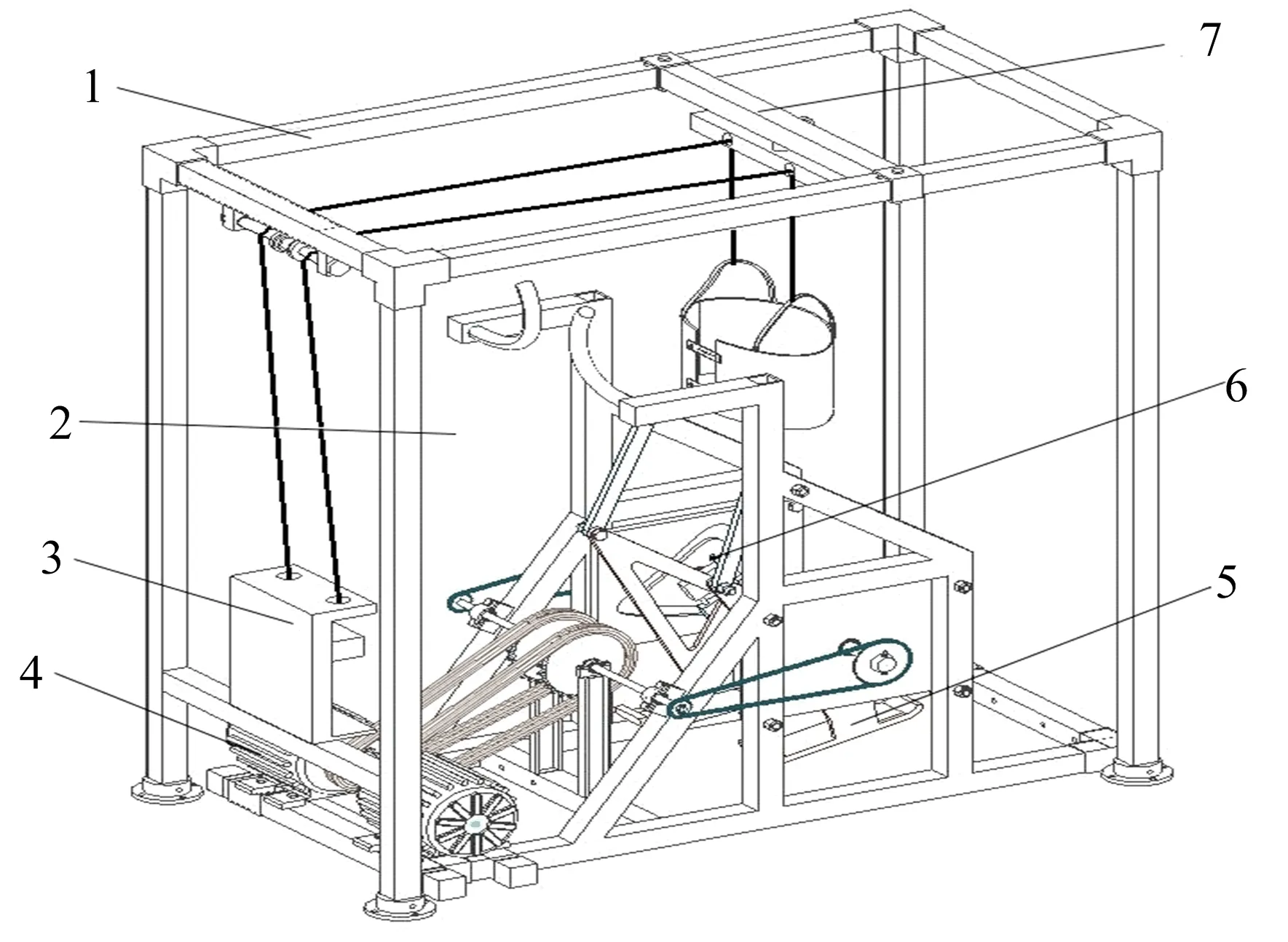
1.减重装置 2.下肢康复装置 3.配重块 4.驱动电机 5.踏板 6.凸轮 7.滑轨
下肢康复机构[17-18]示意图如图2所示。其中:输入构件1是主运动;连杆5上端与凸轮连接到固定支架上;连杆4、连杆5铰接;连杆4与主动杆1铰接,通过凸轮内圆槽滚子运动作为主运动,带动踏板运动。

图2 下肢康复机构示意图
1.2 样机的速度突变
根据确定的机构尺寸参数制作出下肢康复机器人样机。受试者在减重系统的帮助下,两手紧握把手,脚踩在踏板上,跟随踏板运动,完成符合康复训练的下肢运动轨迹。由驱动电机带动链轮组,传动至传动杆,传动杆再通过链轮传动至凸轮中心轴上,带动导杆装配体上的滚子按凸轮内圆槽轨迹运动,带动踏板运动。
经过反复测试,发现在踏板运动过程中,出现速度突变,导致出现运动不平稳、速度波动等问题。针对速度突变问题,对下肢康复机构进行优化,以降低速度突变,提高该装置的稳定性。
2 机构运动学建模
2.1 下肢康复机构几何模型
下肢康复机构在平面直角坐标系中的运动简图及几何参数如图3所示。

图3 下肢康复机构简化原理图
图3中,Oxyz(z方向垂直纸面,图中省略,下同)为静坐标系,x1Ay1和x2Ay2为动坐标系;l1为OA的长度,l2为AC的长度,l3为AB的长度,l4为BC的长度;θ1为x轴正方向与OA之间的夹角,θ2为x1轴正方向与AB之间的夹角,α为AB与AC之间的夹角,β为x2轴正方向与水平方向之间的夹角。该机构的自由度为1。
A点在静坐标系xOy下坐标为OA=[l1cosθ1l1sinθ10]T;B点在静坐标系xOy下坐标为OB=[XBYB0]T;C点在静坐标系xOy下的坐标为OC=[XCYC0]T;C点在动坐标系x2Ay2中的坐标为AC=[l20 0]T。
2.2 正运动学模型
运动学正解是已知C点的凸轮曲线坐标,求解B点的足部步态轨迹坐标的变化规律。
C点在静坐标xOy下的坐标为:
OC=RZAC+OB
(1)
其中
式(1)化简可得:
(2)
(3)
其中:XA=l1cosθ1;YA=l1sinθ1。
将式(3)整理化简为:
(4)


B=[l1cosθ1+l3sin(α+β)
l1sinθ1-l3cos(α+β)]T
(5)
2.3 逆运动学模型
运动学逆解是已知B点足部步态轨迹坐标,求解C点凸轮曲线坐标的变化规律。
(6)

(7)
其中:XA=l1cosθ1;YA=l1sinθ1。将式(7)整理化简为:
N2cosθ1+Q2sinθ1=M2
(8)


(9)
其中,s2=tan(θ1/2)。
同理可以看出,当B点足部步态轨迹坐标和各杆长确定的情况下,即可求出s2,从而求得θ1=2arctans2,再代入式(2),在θ1和θ2确定之后,便可求解出C点的凸轮曲线坐标。
由下肢康复机构的正逆解分析可知,当C点坐标一定时,θ1、θ2的值是唯一确定的,而θ1、θ2反映了足部关节的运动规律。因此,保证B点的运动轨迹与正常行走的足部轨迹基本重合,可以更加精准地实现正常步行的足部运动。
2.4 设计变量
根据下肢康复机构和目标函数的性质可知,该机构的优化参数为l1、l2、l3、l4和α,机构优化参数的矢量关系式X如下:
(10)
2.5 目标函数
下肢康复机构优化要确保足部步态轨迹在正常轨迹的范围内,并且降低机构运动速度与正常步态速度的差值,才能确保良好的康复训练效果。首先将足部步态轨迹B点的坐标表达式对时间t求导,得出B点的瞬时速度vB,可知:

(11)
则B点的速度和加速度为:
(12)

(13)
其中

(14)
其中:v和a为设计变量;i为具有给定速度值点的个数,小于等于m。
2.6 约束条件
保证足部步态轨迹与正常步态轨迹基本重合,即足部步态B点轨迹与给定正常步态轨迹重合,在两轨迹上取n个具有代表性的点,将这n个点两轨迹坐标值误差的平方和作为约束条件,即
(15)
由此可知,第1个约束条件如下:
fxy→min
(16)
为了降低机构速度的峰值,减小速度和加速度突变,第2个约束条件如下:
(17)
考虑到人体膝关节各骨骼的运动范围均在合理的运动空间内,因此四杆机构运动应不超过这个范围,可以通过约束5个变量的取值范围来满足这一条件。结合人体膝关节结构、股骨和胫骨平台尺寸[19]及其大致活动范围,确定变量取值范围,第3个约束条件如下:
3 差分进化算法优化及康复评价
3.1 算法概述
本文采用差分进化算法和传统牛顿迭代相结合的方法。差分进化方法本质是一种实数遗传算法,它具有遗传算法的全部特性,但在原有实数遗传算法的基础上做了大量修改,使其具有较强的全局收敛能力和鲁棒性。算法由变异、交叉和选择3个部分组成。
3.2 标准差分进化算法原理及流程
在给定算法初始条件下,随机产生1组初始种群,进行变异、交叉和选择这3个操作后,最终找出最优解。差分进化算法步骤如下所述。

2) 变异操作。任取种群中2个不同个体做差,将得到的结果进行一定处理后再与不同于这2个个体的第3个个体求和,产生新的个体。常见的变异操作有:
(18)
(19)
(20)

3) 交叉操作。将变异后的个体与当前种群中某个个体按照一定的方法进行概率选择:
(21)
其中:rand(j,i)(i∈[1,Np],j∈[1,D])是区间[0,1]上均匀分布的随机数;CR为交叉因子,CR∈[0,1]。
4) 选择操作。将“交叉”产生的个体与初始种群的个体比较,保留较好的个体,即
(22)
其中:f(X)表示种群个体目标函数值;i=1,2,…,Np。
3.3 优化算例
采用MATLAB软件中的差分进化算法对目标函数进行优化,从而对各杆长和角度等参数进行求解。工具箱的优化参数设置为:种群规模Np=20,缩放因子F=0.5,交叉因子CR=0.9最大进化代数G=100。
优化流程示意图如图4所示。
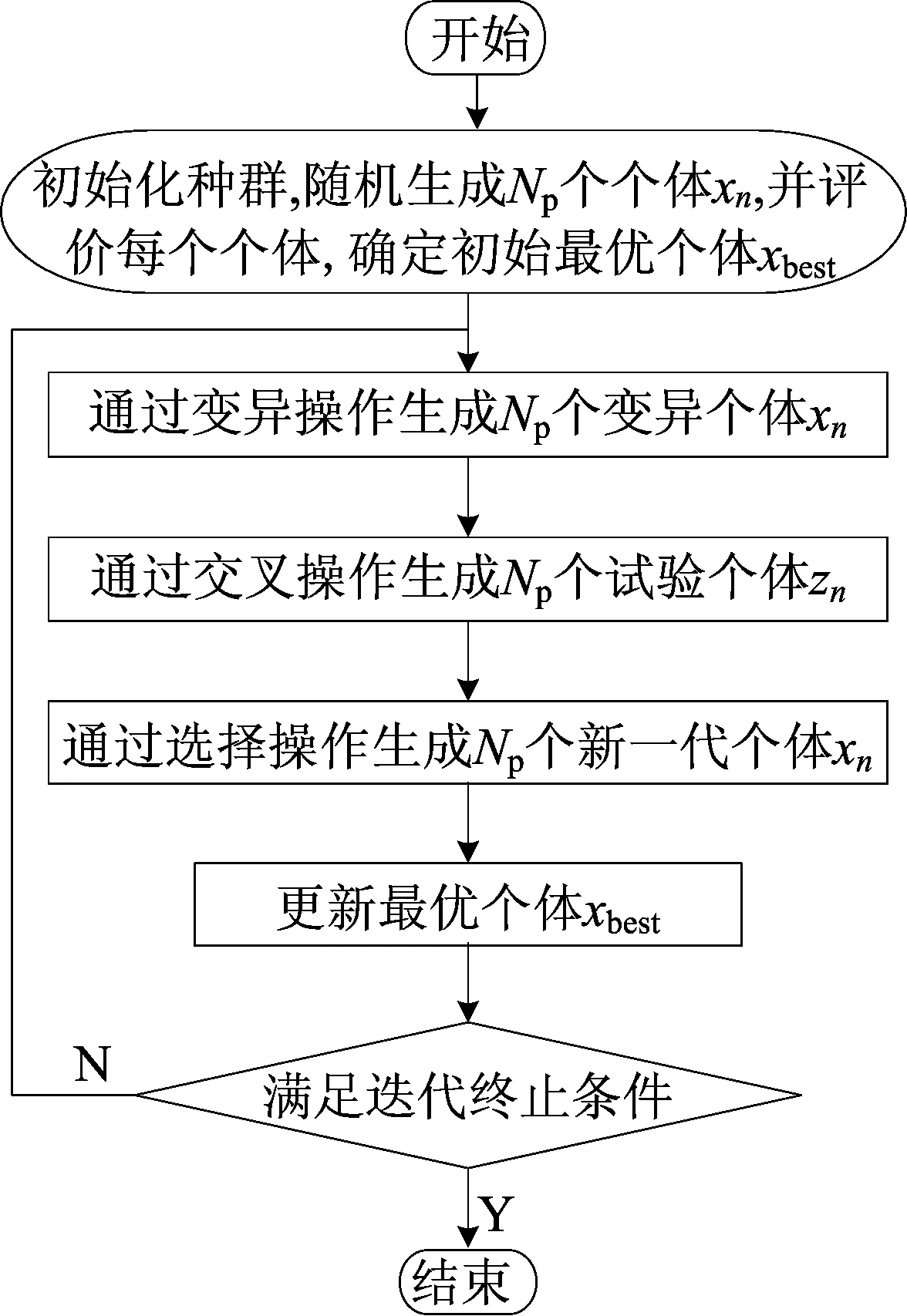
图4 优化流程示意图
利用差分进化算法对目标函数进行优化计算,得到圆整后的下肢康复机构优化求解结果,见表1所列。
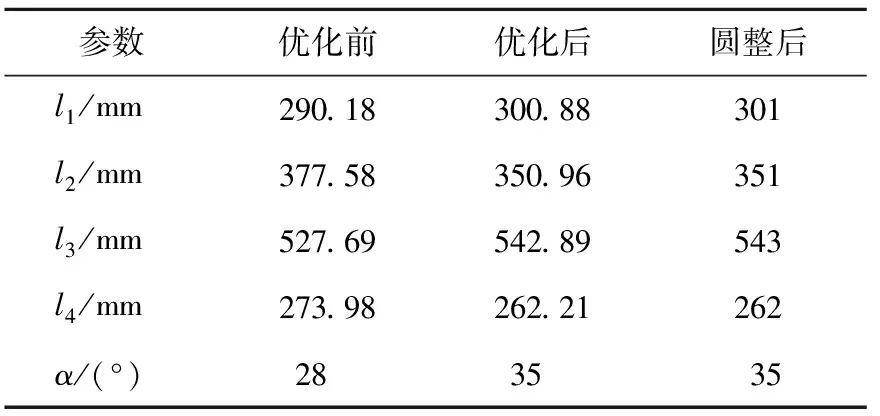
表1 四杆机构几何参数优化结果
优化后下肢康复机构建模如图5所示,差分进化算法的进化曲线如图6所示。从图6可以看出:在种群迭代前60代内,目标函数值变化明显,在第60代左右得到一个最优解;由于变异、交叉、选择等操作,在60代之后,目标函数值变化基本趋于平缓,即平均速度值保持恒定。这说明差分进化算法的精细搜索能力很强,能够稳定地收敛于全局最优解,优化结果能较好地逼近理想点。
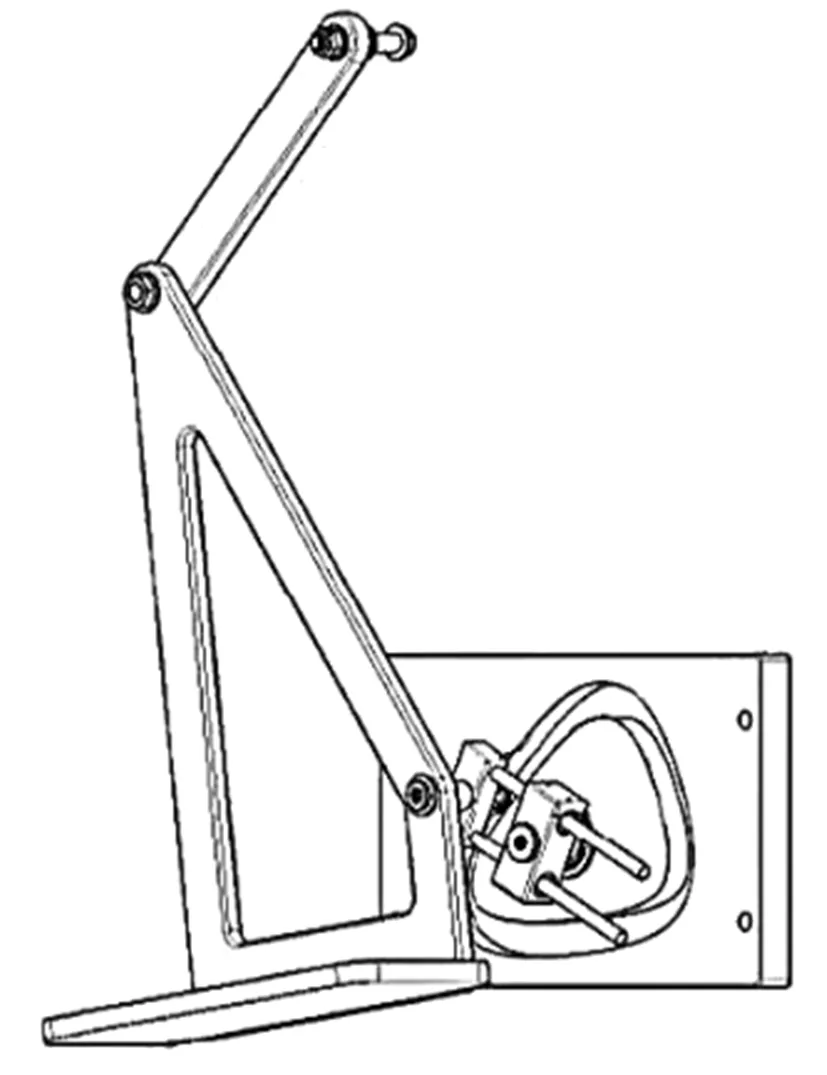
图5 优化后下肢康复机构建模图
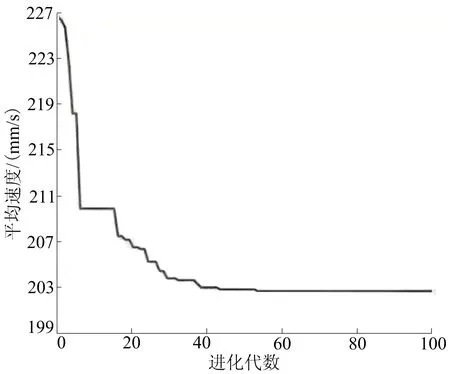
图6 进化曲线
足部末端的速度和加速度的优化结果如图7所示。
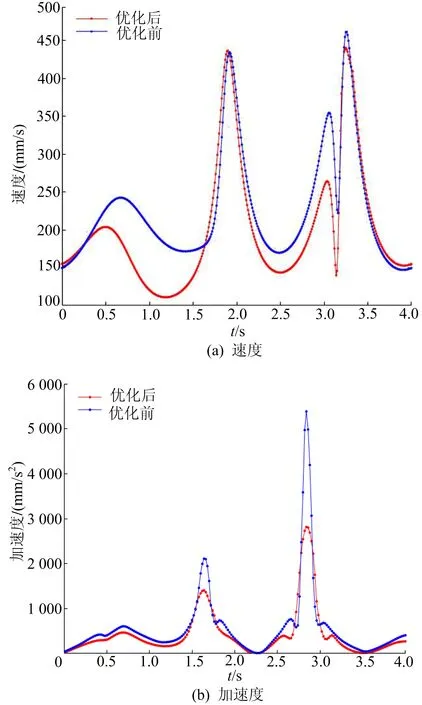
图7 优化前、后足部末端的速度和加速度
由图7可知:优化前的速度波动幅度较大,优化前的平均速度为226.1 mm/s,最大速度为460.8 mm/s;优化前平均加速度为577.6 mm/s2,最大加速度为5 210.8 mm/s2,此时机构容易发生突变现象,导致机构运动不平稳,不能较好地达到预期的康复效果;优化后足部步态轨迹的速度波动幅度较小,相较于优化前,优化后平均速度为200.2 mm/s,降低了12%,降幅25.9 mm/s,最大速度为440.5 mm/s,降低了5%,降幅20.3 mm/s;优化后平均加速度为497.8 mm/s2,降低了16%,降幅79.8 mm/s2,最大加速度为2 840.5 mm/s2,降低了45%,降幅2 370.3 mm/s2。因此优化后的下肢康复机构输出速度和加速度与正常足部轨迹速度和加速度差值较小,运动比较平稳,机构不容易产生振动。
足部B点轨迹的优化结果如图8所示。由图8可知,优化后的足部步态轨迹和正常步态轨迹基本重合,表明机构符合下肢康复训练系统的整体要求,能够为不同康复期的下肢偏瘫患者提供科学的康复训练轨迹,有助于偏瘫患者的康复训练。

图8 足部B点轨迹
最终,根据确定的机构尺寸参数制作出下肢康复机器人样机,如图9所示。

图9 下肢康复机器人样机
3.4 人体下肢康复评价
本文提出了一种以层次分析法(analytic hierarchy process,AHP)为基础的下肢功能康复评估指标体系,并建立了一种基于综合指标的评估方法,该指标能够真实地反映患者在康复过程中的训练效率,从而为不同的患者量身制定康复训练方案,使康复训练方式的选择更加科学、高效,最终满足患者的康复需求。
1) 在下肢运动机能评估中,各项指数因单位差异而无法比较,各指数的数值区间也不相同。为避尺度差异所带来的影响,本文进行了无量纲化,获得各个评价指数的规范化数值,并将各个指数的有关参数与其他指标进行比较,计算公式如下:
X=Xi/Xj
(23)
其中:X为标准化后的该指标值;Xi为处理前各指标值;Xj为基准值。
2) 评价效果受多种因素的影响,并具有很大的不确定性,因此本文运用全面指标法对下肢运动能力进行评估。该评价模型为:

(24)
其中:X为指标层的标准化值;Rk为指标层的权值;Wi为标准层的权值;Y为综合的评估值;m为指标层的指标数;n为标准层的数量。
3) 整体评分由式(24)得出,评分为4个级别,每个级别表示不同的人体肢体康复训练效率,用来表达评分和等级效率之间的相关性。等级中四级康复训练的效率最高,一级康复训练的效率最低。总分评级模型表见表2所列。

表2 总分评级模型表
该评估指标体系为速度和加速度曲线的选择和实现奠定了评价模型和理论基础。
4 结 论
针对下肢康复机构存在的速度突变导致机构运动不平稳等问题,本文采用差分进化算法对该机构进行尺度综合研究,优化了机构杆长和角度等设计参数。基于对下肢康复机构的运动学分析,建立了正逆解的数学模型,确定了该机构的优化变量和目标函数;利用差分进化算法寻找出最优杆长和角度等设计参数。优化结果表明:优化后的下肢康复机构输出的速度和加速度减小,提高了装置的稳定性;同时优化后的足部步态轨迹和正常步态轨迹基本重合,验证了差分进化算法解决基于运动轨迹的单自由度下肢康复机器人速度突变问题的有效性。提出了一种基于AHP方法的下肢功能康复评估指标体系,并建立了一种综合指标的评估方法,使康复训练方式的选择更加科学、高效,更好地满足患者的康复需求。
猜你喜欢
保健医苑(2023年2期)2023-03-15
新世纪智能(数学备考)(2021年5期)2021-07-28
装备制造技术(2020年11期)2021-01-26
中华养生保健(2020年2期)2020-11-16
电子制作(2018年18期)2018-11-14
自动化学报(2018年6期)2018-07-23
制造业自动化(2017年2期)2017-03-20
信息安全研究(2015年3期)2015-02-28
发明与创新(2015年33期)2015-02-27
太空探索(2014年1期)2014-07-10
