局部遮荫下基于IP&O-SSA的MPPT控制研究
2023-10-26 06:50王延年廉继红王炳炎
西安工程大学学报 2023年4期
王延年,王 栋,廉继红,王炳炎
(西安工程大学 电子信息学院,陕西 西安 710048)
0 引 言
由于光伏发电的发电方式安全和维护简单,在国内外新能源发展中越来越受到重视,然而,效率是限制光伏发电发展的重要因素之一[1]。MPPT的基本原理是通过改变DC/DC变换器中的开关占空比使光伏阵列的发电效率一直工作在最大值[2]。
在理想无遮荫条件下,传统MPPT(扰动观察法[3]、电导增量法[4])可有效实现寻优,但是在局部遮荫下,传统MPPT算法容易陷入局部最优[5]。对于传统MPPT算法的改进,有的建立闭环连续寻优系统的小信号线性动态数学模型规律逼近MPP[6],还有对传统扰动观察法进行改进,设计了一种变步长扰动观察法[7],但在精度和速度上不能同时有效兼顾[8]。随着智能优化算法的推陈出新,MPPT的技术支持也越来越多。如樽海鞘算法[9]、蚁狮算法[10]、SSA[11]、布谷鸟算法[12]。文献[13]提出了将布谷鸟搜索算法与模糊控制结合的MPPT控制算法。但这些智能优化算法往往只重视精度而忽略了控制算法的跟踪速度。
通过对以上研究,本文提出了一种基于将IP&O和改进SSA相结合的IP&O-SSA复合MPPT控制算法。该算法分为2个模块:初级阶段模块实现快速搜索,先利用SSA强大的搜索能力快速搜索到MPP附近;接下来启动小步平缓阶段模块,即IP&O在MPP附近进行精确的局部开发,最终跟踪到最大功率点为止。最后通过Simulink仿真跟踪对比,验证本文算法追踪最大功率点的速度及精度优势明显。
1 光伏阵列模型
为了解失配情况下光伏组件的电压、电流特性,需要通过建立光伏电池模型来进行了解[14-15]。组件出厂时会给出标准测量条件下的组件电气特性。本文搭建的是主流的双二极管等效电路[16]。
图1描述的等效电路图的线性表达式如下:
式中:Vt为热电压;η为理想因子;Rs、Rp分别为串联电阻、并联电阻;Iph表示光感电流,其与电池本身半导体材料特性有关[17]。Isat、Isat2分别为D1、D2的反向饱和电流[18],表达式分别如下:
式中:k为玻尔兹曼常数,k=1.38×10-23J/K;C为温度系数;T为环境温度;Egap为半导体材料带隙,对于晶体硅材料,Egap=1.8×10-19J。
在大多数应用场景下,光伏组件都会遇到局部遮荫的情况。不管温度和光照幅度如何改变,其MPPT原理都是通过提供电阻负载或恒压负载来改变占空比来确保光伏组件始终工作在最大功率点上。除了采样光照辐照和温度,还需要采样光伏组件输出的电压和电流瞬值[19-20]。
2 麻雀搜索算法(SSA)及其改进
2.1 SSA概述
SSA模拟生物行为把觅食中的麻雀划分为发现者和参与者,两者兼具侦察预警机制,发现者首先发现食物,引导参与者加入其中,很明显发现者有更加广阔的觅食空间。
在每次搜索迭代中,每个“麻雀个体”通过搜索当前区域内的局部最优解,并将搜索到的最优解共享给同一“麻雀群体”内的其他个体。同时,算法还会通过跨“麻雀群体”的交流来引入全局搜索能力,从而增加了算法的搜索范围和搜索效果[21]。
假定第p只麻雀在种群中的位置为Xpq,发现者在每次迭代中的位置更新公式为
式中:t和N分别为当下迭代次数和全局迭代的最大次数;Xpq为麻雀当前位置;Q和α为随机数值,且Q满足正态分布,L为单位列向量矩阵;R2、S分别为预警值和安全值。当预警值大于安全值时,麻雀周围有捕食者,此时的麻雀要迅速地做出反应飞到安全的地方;反之麻雀则安全,且捕食过程中会有捕食者虎视眈眈。对于参与者,它们随时监视发现者的觅食行为,一旦觅食进行,它们会发现位置更新并加入其中争夺所有权[21]。参与者的位置更新公式为
式中:Xu为即时最优解,即发现者发现的最有利位置;Xw为整个种群中最差的位置;A为单位列向量矩阵。p>n/2(n表示麻雀种群数量)时,发现者改变当前位置,飞往其他合适位置,且它们初始化位置为随机值,侦察到预警值的麻雀位置更新公式为
式中:Xb为全局最优解;β为随机数值且满足正态分布;K表示移动方向值,绝对值小于1,K和β都是步长控制系数。fp为麻雀当前位置,fg、fw分别为当前种群的适应度最优值和最差值。两者相等时,表示种群当中的预警鸟发现危险且迅速转向种群内部以降低被捕风险值。
2.2 改进SSA性能
从文献[22]可知,标准SSA可能会陷入局部最优,群体智能优化算法在接近全局最优时,种群多样性减少,易于陷入局部最优等缺陷。本文针对SSA的改进优化主要从以下2个方面进行。
1) 在麻雀搜索的初始化阶段加入带有随机变量的Tent混沌序列,提高全局搜索的精度和广度。
2) 将Levy飞行策略加入到预警者更新公式中,使其在长距离搜索和短距离搜索时都能够很好地随机搜索路径。
2.2.1 Tent混沌序列
混沌是非线性问题中常见的一种无规则现象,混沌的诸多随机性、不确定性被用到智能优化算法中,不仅能扩大全局搜索能力,避免陷入局部最优,还可以确保种群的样本多样性。为了提高Tent混沌遍历性的多样化,本文选择将随机变量引入到Tent混沌序列中,引入后的表达式如下:
式中:rand(0,1)为0到1的随机数;NT为整个序列的粒子数。
序列先随机生成(0,1)之间的初值,再利用式(6)进行迭代,直到迭代到最大次数,循环结束,生成结果[23]。在麻雀搜索的初始化阶段加入了带有随机变量的Tent混沌序列,可有效地提高全局搜索的精度和广度。
2.2.2 Levy飞行策略
在寻找最优解过程中,可将Levy飞行的随机行走方式加入到麻雀种群里,使其在长、短距离搜索时都能够很好地随机搜索路径[24]。对于系统功率出现多峰值的情况,将Levy飞行策略公式(7)引入式(5)中,改进公式如式(9)所示。
Levy飞行公式L(d)如下:
σ的取值公式为
式中:Γ为伽马函数;r1、r2为[0,1]内的2个随机数[23]。加入Levy飞行策略的预警值更新位置公式如下:
式(9)可以使搜索算法根据当前位置与麻雀最优位置的距离来进行位置更新,这样可有效降低麻雀陷入局部最优的风险,进而充分执行局部搜寻。
3 基于IP&O-SSA的MPPT控制
3.1 自适应扰动观察(IP&O)
扰动观察(P&O)是一种很经典的光伏MPPT算法,该算法有实现简单和功能稳定的优点。对于所有MPPT算法而言,必须满足微扰或光照幅度引起的功率快速变化与跟踪速度之间的平衡条件,传统的P&O在周遭环境突变引起的局部遮荫下会陷入局部最优死循环中,无法有效跟踪最大功率点[25]。关于IP&O,从以下2个方面进行改进。
1) 扰动策略的改进。扰动过大或过小都会导致MPP跟踪精度下降,因此可以采用自适应扰动策略,根据当前工作点位置和功率变化情况自适应地调整扰动大小和方向,以尽可能快地寻找到MPP。
2) 滤波处理。P&O存在稳定性问题,当光伏组件在MPP附近工作时会出现工作点来回波动的情况。为了解决这个问题,加入滤波处理,将输出功率信号平滑处理,减小波动幅度,提高控制精度。
可以通过变换光伏组件输出功率-电压特性曲线的斜率来实现自适应变步长调整占空比大小,如下:
式中:Tp为采样周期;d为占空比;k为一常数;N为比例因子,满足N|ΔPmax|/|ΔVmax|<Δdmax,Δdmax为系统设定的最大变步长期望值,其原理是在当前工作点添加微扰Δd来观察功率变化,再根据变化值实时快速调整扰动大小来改变功率波动曲线走势,不断循环此过程最终到达最大功率点[26]。
3.2 IP&O-SSA结合的MPPT
基于自适应IP&O和SSA相结合的光伏MPPT复合控制策略IP&O-SSA基本思路如下:该算法分为2个模块,初级阶段模块实现快速搜索,先利用SSA算法强大的搜索能力快速搜索到MPP附近;接下来启动小步平缓阶段模块,自适应IP&O算法在MPP附近进行精确的局部搜索,跟踪到最大功率点为止。基于IP&O-SSA复合MPPT算法的控制思路如下。
1) 通过内置温度和光感传感器自动捕捉当前环境温度值以及光照强度值。如遇环境突变立即启动MPPT循环,同时组件的输出电流及电压作为被控变量,需要实时计算开路电压、短路电流。
2) 第一步首先需要开启SSA,初始化值,更新发现者、追随者及侦察者的位置。通过实时的电压和电流计算当前功率值。
3) 全局模块根据算法给出的最大迭代次数跟踪到要求精度。当满足终止条件时,立即停止全局模块的搜索,继而转为IP&O局部搜索。这样既保证跟踪的速度又保证了要求的精度。
4) 全局和局部搜索依次进行的前提是检测到光伏组件处于局部遮荫环境下,即光照强度发生变化的时候。IP&O-SSA控制算法重启的条件是满足|(Pb-Pa)/Pa|>τ,其中Pb为当前系统实际输出功率,Pa为前一时刻系统输出功率,τ为系统设置的允许最大功率误差。
基于IP&O-SSA复合MPPT算法整体流程如图2所示。
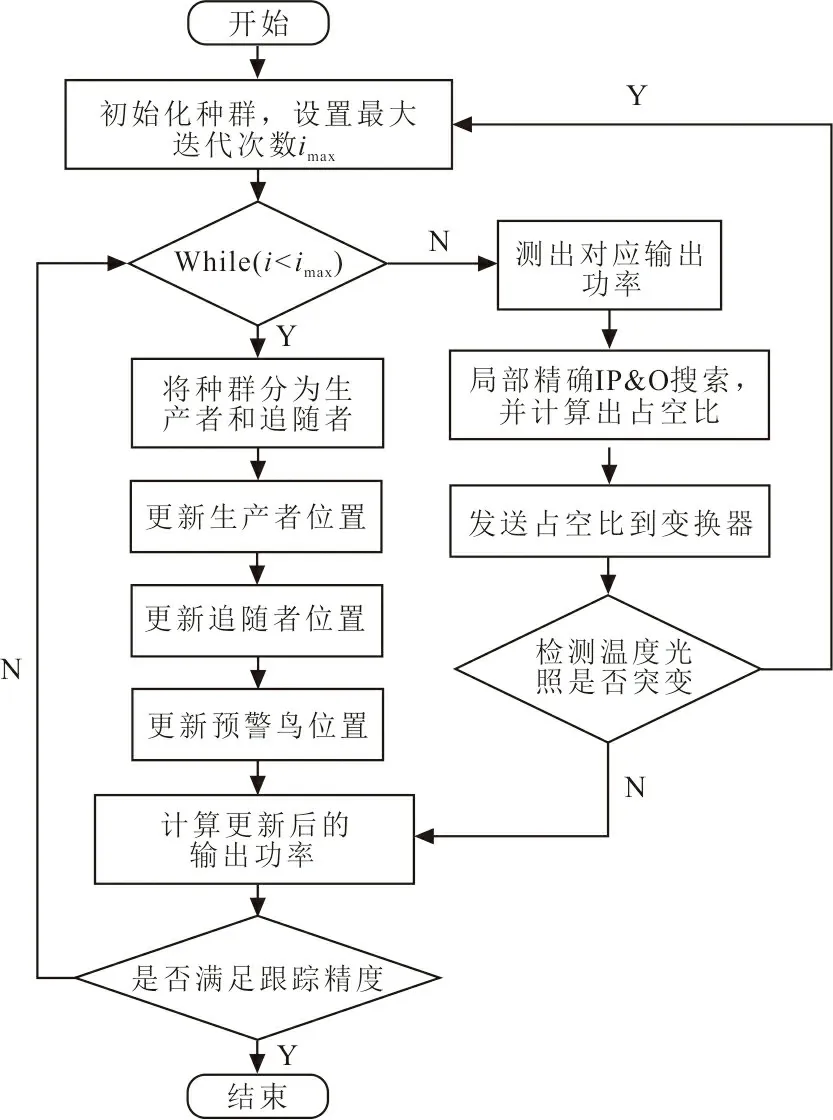
图2 IP&O-SSA复合MPPT算法Fig.2 IP&O-SSA composite MPPT algorithm
4 仿真结果及分析
为了验证本文所提算法的快速准确性,分别选取P&O、SSA、IP&O-SSA算法在Simulink中建立仿真模型。搭建3种模式:理想无遮荫、固定局部遮荫、动态局部遮荫。光伏组件制造商出厂铭牌给出了标准测试条件:光伏组件标准测试单元的温度Tstc=25 ℃,辐照度Gstc=1 000 W/m2,大气质量为1.5。本文根据某组件厂商的两块120系列360 W半片组件并联为原型搭建仿真模型,单块组件最大输出功率为360 W,其开路电压Uoc=40.9 V,短路电流Isc=11.2 A,最大功率电压Vmpp=33.68 V,最大功率电流Impp=10.69 A。
4.1 理想无遮荫情况下的功率追踪
标准测量条件无遮荫下的P-V特性曲线呈单峰状态,在标准温度Tstc=25 ℃,标准辐照度Gstc=1 000 W/m2下,分别测试P&O、SSA、IP&O-SSA的功率走势,如图3所示。

(a) 功率-电压特性曲线 (b) 输出功率对比图3 理想无遮阴下的光伏阵列功率追踪曲线Fig.3 Ideal unshaded photovoltaic array power tracing curve
从图3可以看出,本文算法最先跟踪到最大功率点,其他2种算法需要经过大范围寻优过程,过程震荡明显,收敛缓慢。标准测量条件模式下,3种MPPT算法耗时和输出功率对比结果如表1所示。

表1 标准测量条件下的MPPT算法输出功率对比Tab.1 Comparison of output power of MPPT algorithm under standard test condition
标准测量条件的模式下,可跟踪到理论最大功率为720 W。从表1可知, 3种算法达到MPP的时间分别为54 ms、67 ms、51 ms;跟踪到的平均Pmpp分别为717.4 W、718.4 W、719.2 W;跟踪到的最大功率与理论最大值的误差值分别为0.36%、0.17%、0.11%。实验结果表明,在标准环境下,本文算法最先跟踪到最大功率点,收敛时间比改进前的P&O和SSA提升3 ms、16 ms,跟踪效率高达99.99%。验证了本文算法收敛速度最快,最先到达最大功率点处,且跟踪最大效率的误差值最低,功率损耗也最低,说明该算法适用于工作在标准环境下。
4.2 固定局部遮荫情况下的功率追踪
固定局部遮荫条件下的P-V特性曲线呈多峰状态,在标准温度Tstc=25 ℃,2块并联组件的辐照度Gstc分别为800 W/m2、600 W/m2下,分别测试P&O、SSA、IP&O-SSA的功率走势,如图4所示。

(a) 功率-电压特性曲线
从图4可知,本文算法最先跟踪到最大功率点,其中P&O会陷入局部最优,之后一直收敛于局部最优值。传统SSA和IP&O-SSA可以快速到达MPP。固定局部遮荫模式下,3种MPPT算法的耗时和输出功率对比结果如表2所示,其中“—”表示数据无法获得。
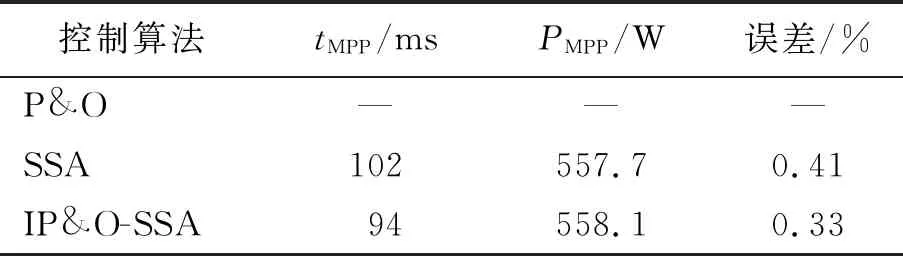
表2 固定局部遮荫下的MPPT算法输出功率对比Tab.2 Comparison of output power of MPPT algorithm under fixed local shading
固定局部遮荫模式下可跟踪到的理论最大功率为560 W。从表2可知,P&O会陷入局部最优,无法跟踪到最大功率点。SSA、IP&O-SSA达到MPP点的时间分别为102 ms、94 ms;跟踪到的平均Pmpp分别为557.7 W、558.1 W;跟踪到的最大功率与理论最大值的平均误差值分别为0.41%、0.33%。实验结果表明,在局部静态遮荫条件下出现多峰值现象,传统P&O会陷入局部最优,无法有效跟踪到系统的最大功率点,相较于改进前的SSA,本文算法的平均收敛时间缩短了8 ms,同时跟踪效率高达99.68%,提升了0.09%。本文算法的MPPT速度和精度为最优,说明该算法适用于工作在局部遮荫的条件下。
4.3 动态局部遮荫情况下的功率追踪
为了测试算法在环境突变的情况下的适应能力,模式3由标准测量条件突变到局部遮光条件,模拟标准光照幅度突变到局部遮荫情况,即动态局部遮荫模式。标准温度25 ℃下,光照幅度经历2次突变,2次突变后的理论最大功率值分别为668 W、560 W。第1次突变是由2块辐照度均为1 000 W/m2的组件突变到分别为1 000 W/m2、800 W/m2;第2次再突变到分别为800 W/m2、600 W/m2。此时的光伏系统的功率-电压特性曲线经历了2次突变,分别测试P&O、SSA、IP&O-SSA的功率走势,如图5所示。

(a) 光伏阵列功率-电压特性曲线
从图5可以看出,本文算法在突变前后都是最先跟踪到最大功率点,其他2种算法寻优过程缓慢且震荡严重,且P&O的2次突变都陷入局部最优。动态局部遮荫模式下,3种MPPT算法的耗时和输出功率对比结果如表3所示,其中“—”表示数据无法获得。

表3 动态局部遮荫下的MPPT算法输出功率对比Tab.3 Comparison of output power of MPPT algorithm under dynamic local shading
从图5和表3可知,在动态局部遮荫模式下,没突变之前,3种算法和标准条件模式下的走势图趋近相似,但在第1次突变之后,P&O陷入了局部最优,SSA、IP&O-SSA达到MPP点的时间分别为1 320 ms、1 230 ms;跟踪到的平均Pmpp分别为665.4 W、665.9 W;跟踪到的最大功率与实际最大值的平均误差值分别为0.39%、0.32%;在第2次突变之后,P&O也陷入了局部最优,SSA、IP&O-SSA达到MPP点的时间分别为1 940 ms、1 830 ms;跟踪到平均Pmpp分别为557.7 W、558.1 W;跟踪到最大功率与实际最大值的平均误差值分别为0.41%、0.33%。3种算法在经历2次光照幅度突变的情况下,本文算法不会陷入局部最优,相较于改进前的SSA,本文算法的收敛时间分别快了10 ms,且跟踪最大效率值的误差值分别降低了0.07%、0.08%,本文算法在经历环境突变的情况下也能更快更精准地跟踪到最大功率值,且后期出现震荡较小。说明本文算法适用于工作在环境突变的情况下。
5 结 论
针对传统MPPT算法P&O易陷入局部最优和智能优化算法SSA搜索缓慢的问题,本文结合P&O和SSA的优点,提出了自适应扰动观察和改进SSA复合的IP&O-SSA。通过以上3种仿真实验得到3点结论。
1) 相较于传统P&O,改进后的IP&O-SSA在标准环境下,收敛时间缩短了3 ms,且在局部遮荫下不会陷入局部最优。
2) 相比传统SSA,改进后的IP&O-SSA在标准环境下,跟踪效率达99.99%,提升了0.06%,且在局部遮荫下的收敛时间缩短了8ms,表明在保证准确性的前提下,收敛速度得到了进一步的提升。
3) 无论是在静态环境下(理想无遮荫、静态遮荫)下,还是在环境突变下,IP&O-SSA适用于日常大部分应用情景。本研究为提升光伏阵列的发电效率提供了理论控制算法基础,为之后的光伏阵列并网减少了不必要的功率损耗。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
作文小学中年级(2019年10期)2019-11-04
数学物理学报(2019年4期)2019-10-10
新世纪智能(高一语文)(2018年11期)2018-12-29
趣味(语文)(2018年2期)2018-05-26
贵州师范学院学报(2016年3期)2016-12-01
山东青年(2016年1期)2016-02-28
电源技术(2015年11期)2015-08-22
电测与仪表(2015年21期)2015-04-09
电测与仪表(2015年11期)2015-04-09