基于图像特征的纱线条干均匀度实时检测
2023-10-26 06:50宋栓军韩宇琪方泽钰
西安工程大学学报 2023年4期
宋栓军,韩宇琪,方泽钰
(西安工程大学 机电工程学院, 陕西 西安 710048)
0 引 言
纱线条干均匀度是衡量纱线质量的最重要指标。纱线条干均匀度作为纺织品生产过程中的一个重要因素,对其进行测试和评估是非常重要的,因为纺织品的外观和内部质量很大程度上是由纱线均匀性决定的[1-2],这会影响到纺织品生产过程的稳定性[3]。目光对比法[4]、光电式检测法[5]以及电容式检测法[6]是目前对纱线外观质量检测的传统及主要方法,但近年来随着机器视觉以及图像处理方法的发展,为提高检测效率及精度,纱线条干均匀度以及疵点检测等纱线外观质量检测也逐渐开始使用机器视觉及图像法。
目前,机器视觉及应用图像处理的纱线外观质量检测研究较多,但大多研究在离线状态检测,多研究的是阈值分割算法以及边缘检测算法,未将算法的速度加入考虑范围内,不能满足实时检测对于算法响应性的要求。文献[7]提出的由CMOS数据采集板组成的检测纱线外观质量系统,选择使用定制的软件利用光信号处理获取的纱线图像,该系统虽测量精度高,但对硬件要求以及成本也高。文献[8]提出一种基于图像融合原理,获取纱线条干图像边缘的方法,但该方法需在显微镜下获得纱线毛羽图像,硬件要求高且检测效率低。文献[9]提出一种显著性方法检测纱线条干均匀度,使用迭代阈值法及区域滤波,其测量结果较为准确。但该方法计算时间较久,不能应用于实际生产车间的纱线外观质量实时检测中。文献[10]在阈值分割方法上选择使用模糊C-均值聚类算法对纱线条干均匀度进行检测,该算法计算速度较慢,且未对纱线图像重合部分进行处理。
总体而言,目前大部分文献对于重复采集的纱线数据多是采用人工去重方法,会导致检测得到的纱疵数量多于真实值。针对这一问题,本文提出一种基于图像特征点检测的纱线条干均匀度实时检测算法,算法流程简单,动态响应性较好,普适性较高,可以对纱线直径进行连续测量,对重复获取的纱线数据进行去除及时获得纱线条干均匀度以及纱疵的识别。
1 图像采集装置
实验中采用3种不同规格的纱线,分别为11.6 tex、18.2 tex和27.7 tex紧密纺纯棉纱。纱线图像采集装置包括收放卷机构[11]、导纱轮组、过线架、工业相机、LED补光灯、背景黑板、伺服电机、配重机构、PLC等,采集系统正、反方向立体视图如图1所示,其中机械部分装置安装在正面,电器部分安装在反面电器箱中,图1中的数字分别表示为:1—伺服电机;2—收放卷机构;3—过线架;4—纱线; 5—配重机构;6—触摸屏控制器;7—工业相机;8—LED补光灯;9—导纱轮组;10—黑色背景板;11—服控制器;12—排风扇;13—空开;14—PLC+模块;15—24 V电源。

(a) 机械装置图(正面)
图1中,对纱线进行采集时将待检测纱线4放置在收放卷机构2上通过14 PLC+模块与伺服电机控制11驱动同步带轮带动纱线的运动,纱线运行速度可在1~100 m/min之间调整,且可进行正反转,对同一段纱线进行重复检测;纱线4通过过线架3,再经过导纱轮组8,以减轻纱线抖动程度;设置配重机构5进行缓冲,防止电机启动时速度过快拉断纱线;工业相机10及LED补光灯9放置在两组导纱轮组9中,以采集清晰的纱线图像[12-13];最终将采集到纱线图像通过图像采集卡传输至电脑中进行处理,实现纱线条干均匀度的实时检测。使用面阵工业相机所采集纱线图像的分辨率为2 048×1 536像素,最小曝光量为3 000 lx·s,相机最高帧频为110 帧/s,曝光量及相机帧频根据纱线运动速度与光源亮度进行相应调整。为确保检测结果准确性,每种样本的测量长度为10 m。
为获得相机内外参数以及去除相机畸变,选择使用张正友标定法进行相机标定[14-15],去畸变后图像分辨率为1 988×1 511像素,使用棋盘格相邻角点像素值与棋盘格实际尺寸计算得到像素精度约为0.019,即相机在目前位置时1像素宽度对应实际尺寸为0.019 mm,则每张图像表示实际纱线长度约为39.76 mm。为保证获得的纱线数据连续与完整,对纱线图像相邻两帧选择重合采集处理。
2 实时检测算法设计
为获得精确的纱线直径数据,需对采集到的纱线图像进行处理,本文提出的图像处理算法流程如图2所示。
2.1 灰度处理
由于采集到的彩色图像数据量较大,因此为了减少数据运算数量,需要将获得的RGB图像转换为单通道的灰度图。且灰度变换可使图像更加清晰,使图像中的纱线更加突出,方便后续的线特征提取。常用的彩色图像转换为灰度图像的转换公式[16]为Ha=0.299R+0.587G+0.114B,其中Ha为彩色图像的灰度值,3个通道信号强度值分别为红色R、绿色G和蓝色B。
2.2 感兴趣区域(ROI)获取
在对灰度变换后的图像进行下一步处理前,使用最小外接矩形算法[17]对图像自动设置ROI,去除多余背景部分[18]。冗余的背景会增加计算量,而实现实时检测就需要减少计算数据提高算法计算速率。具体实现步骤如下。
1) 阈值分割。选择使用最大类间方差法快速对图像进行阈值分割,将图分为纱线(前景)和背景2个部分。
2) 寻找纱线最小外接矩形。在opencv-python中调用cv2.minAreaRect()算子来获得最小外接矩形,得到寻找的最小外接矩形的中心点坐标、矩形长宽以及旋转角度;然后通过算子cv2.BoxPoints()获得该矩形的4个顶点坐标;最终找到图像中纱线最小外接矩形。
3) ROI获取。通过上一步将纱线灰度图按照纱线方向进行感兴趣区域获取。当纱线为水平方向时,R(Xr,Yr)=g(X1:X2,0:W),X1=x-H,X2=x+H,当纱线为垂直方向时,R(Xr,Yr)=g(0:H,Y1:Y2),Y1=y-H,Y2=y+H。其中:最小外接矩形中心点(x,y),最小外接矩形宽度W、长度H,R(Xr,Yr)为ROI大小;Xr、Yr分别为截取图像长宽;g(X,Y)为原始灰度纱线图像;X1:X2代表从X1行至X2行;Y1:Y2代表从Y1列至Y2列。
截取后获得纱线图像如图3所示。
2.3 滤波预处理
实际生产过程中,绒羽、相机噪点的存在等不可避免的干扰因素会对提取纱线特征信息产生较大的干扰,为减少干扰,提高后续检测结果准确性,须对纱线图像进行滤波处理,消除采集图像的噪声信息。而滤波处理噪声方法对图像边缘及其他信息破坏较小甚至可以忽略不计。图像处理原则是尽可能保留图像细节,如纱线边缘及毛羽细节[19-20]。为保证消除噪音后纱线边缘的清晰度,先将图像进行高斯滤波处理[21],再进行锐化处理。
2.4 阈值分割
通过滤波处理后得到无噪声且边缘清晰的图像后,需将目标与背景分离。OTSU计算速度较快且能随环境变换动态获取分割阈值,对背景与目标之前的类间方差进行遍历,将遍历后得到的最大值作为最优分割阈值T[22]。
2.5 形态学运算
阈值分割后得到的二值图像仍存在多余毛羽及散点,因此需要使用形态学运算,先使用高级形态学去除无关小区域以及散点,再使用开运算将多余毛刺去除,得到完整且无多余毛刺的纱线条干图像。
2.5.1 删除小块区域
为减小开运算的计算量,可在开运算前预先将游离于纱线主干外的小块区域进行筛选去除。对于二值图像,只有0(黑)/255(白)2种像素点值。如果连续的2个以上相邻像素点取值相同,则这2个以上的像素点就称为在一个连通域内。本文先获得二值图像中所有连通区域面积,设置一个阈值,对所有连通区域进行遍历筛选,若该连通域面积小于该阈值则去除,即可实现散点以及无关区域的去除。
2.5.2 开运算
将散点与无关小区域去除后,二值图只剩下一条纱线主干,但图像边缘不平滑,且仍有细小毛刺,因此需进一步使用开运算进行处理。使用结构元素进行开运算的图像中物体大小以及位置不会发生变化,所得图形与原始图形一致。开运算处理后的图像中原有的狭小连接会断开,图形轮廓会变得更加平滑,以达到消除纱线二值图像中细小毛刺的目的[23],选择使用半径为5的正方形作为结构元素对删除小区块后的图像进行开运算。
最终经过滤波处理、阈值分割及形态学运算后获得无孤立点及毛刺的清晰纱线条干图像如图4所示。

图4 纱线条干二值图像Fig.4 Binary image of yarn evenness
2.6 基于SIFT算法的纱线数据去重
采集图像时为保证采集纱线数据的完整性,采用帧与帧重合拍摄,但依据纱线传动装置速度、相机帧率以及图像实际物理长度进行计算重合位置并不准确,因此采用基于SIFT算法进行前后两帧图像的特征点提取,以得到较为准确的重合位置并去除。
SIFT算法是一种局部特征描述算法,其具有较好的稳定性和尺度不变性、高速性[24],在一定程度上不受光线变化、仿射变换以及噪声的干扰,因此在实时检测纱线条干时即使检测环境有微小改变,纱线有轻微倾斜也能保证准确地获得特征点,快速地进行特征点匹配[25-26]。具体基于SIFT算法的去重合步骤如下。
1) 获得去除背景的纱线图像。利用纱线检测系统采集具有重合程度的纱线原图以及单张背景图,将采集到的前后两帧纱线图像设置为一对,用纱线图像减去背景图,获得只有纱线部分的灰度图像Is。
2) 获得只含有毛羽的二值图像。设置一个毛羽阈值,将图像Is转化为二值图像,得到含有较多毛羽的纱线二值图像Ibs;同时利用前述方法获得纱线主干二值图像Ic,将Ibs减去Ic获得无纱线主干的纱线毛羽二值图像Ih。结果如图5(a)所示。

(a) 纱线毛羽二值图像Ih局部放大图
3) 使用SIFT算法获得特征点位置。使用SIFT算法对前后两帧图像的Ih1后半部分与Ih2的前半部分进行特征点检测。图5(b)为检测到匹配特征点,获得重合部分特征点坐标,将重合数据去除。图5(c)为去重合效果,可以看到SIFT算法对纱线重合部分去除效果较好。
2.7 直径测量
纱线在运动过程中难免会出现抖动情况,从而产生角度偏移等问题,故一般在图像预处理阶段进行仿射变换对纱线图像进行倾斜矫正。而本文在相机标定时已对相机进行畸变矫正,因此为提高算法动态响应性本文选择在纱线条干提取后计算纱线倾斜角度θ。θ为纱线中心轴线与水平线锐角夹角,θ=arctan[(y2-y1)/(x2-x1)],其中,x1、x2、x3为纱线图像中第一列点坐标A(x1,y1)及最后一列点坐标B(x2,y2)。
按照纱线垂直或水平方向分为按列或按行进行遍历。若纱线为水平方向则从左至右逐列计算每列白像素点数目a;同理,若纱线为垂直方则从上至下逐行计算每行白像素点数目a。每列或每行纱线实际直径d=a×cosθ×p,其中p为前文所计算像素精度。
3 检测结果与分析
为验证本文算法有效性及准确性,使用本文提出算法对3种线密度纱线进行外观质量检测,每种纱线样品测试长度为10 m,纱线运行速度分别设置5 m/min、10 m/min、20 m/min、30 m/min,并与Uster Classimat5条干测试仪的测试结果以及纱疵人工判定结果进行对比。
3.1 纱线直径及条干均匀度结果与分析

反映纱线条干不匀率的主要指标是CV(式中简记CV)值,它既能反映纱线片段间的不匀率,也能反映片段内不匀[28],其计算公式为
(1)

通过上述方法计算得到的3种规格纱线分别在5 m/min、10 m/min、20 m/min、30 m/min运动速度进行检测得到的平均测量直径以及CV值(取158个像素,约3 mm为1段),对比结果如表1所示。
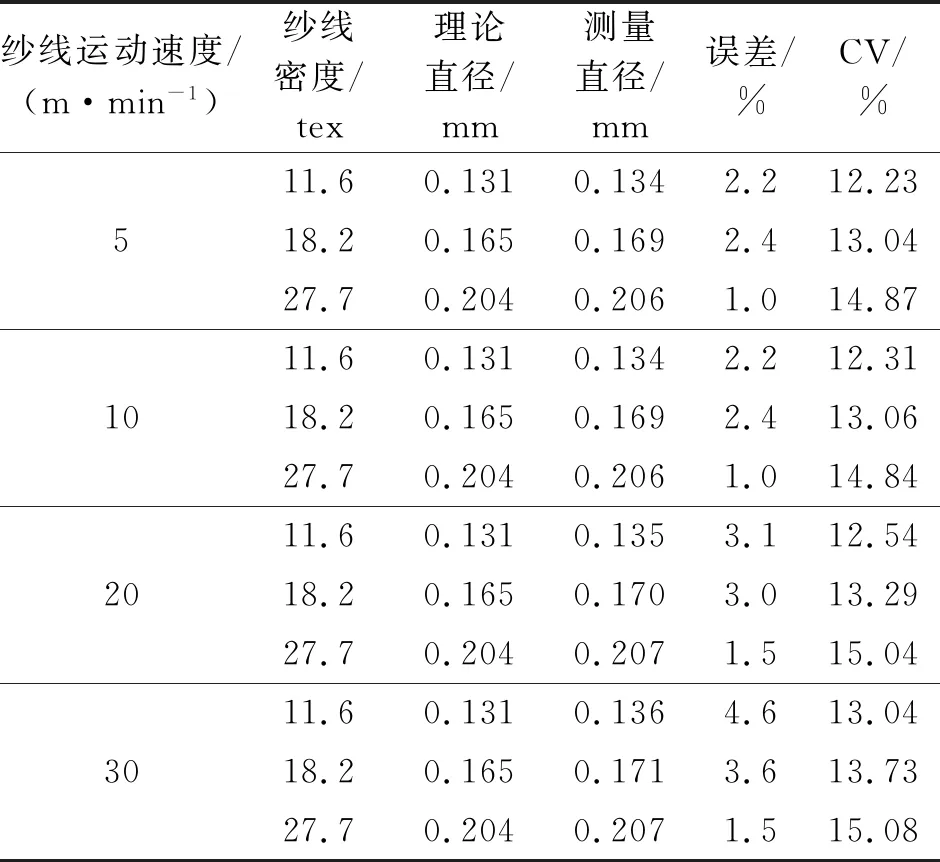
表1 纱线直径测量结果Tab.1 Yarn diameter measurement results
从表1可以看出,在纱线运动速度一定时,纱线密度越小,直径测量误差越大。11.6 tex纱线测量直径平均误差为3.03%,18.2 tex纱线测量直径平均误差为2.85%,27.7 tex纱线测量直径平均误差为1.25%。因为线密度越小的纱线直径越小,即使有较小的数值偏差也会造成误差的急剧增大。在不同纱线运动速度检测的纱线直径误差会随着纱线运动速度增加而增大,5 m/min下纱线测量直径平均误差为1.87%,30 m/min下纱线测量直径平均误差为3.23%。因为纱线运动速度越快越细的纱线抖动越剧烈,采集到的纱线图像会产生重影现象,造成测量直径数据的增大。检测最大误差是纱线30 m/min时,纱线密度最小的11.6 tex测量直径误差为4.6%,在5.0%以内。另外,采用Uster Classimat5仪器测量的纱线密度为11.6 tex 时的CV值是12.22%~13.15%,18.2 tex时的CV值是12.54%~14.07%,27.7 tex时的CV值是14.31%~15.22%。本文方法测量的CV值与Uster Classimat5仪器检测结果有较好一致性,说明使用上述方法测量得到的结果较为准确,可满足纱线在运动速度5~30 m/min下的实时检测。
使用搭建的检测系统利用本文提出的基于图像特征检测的纱线条干均匀度检测算法与模糊C-均值聚类(fuzzy C-means,FCM)算法[10]以及模板遍历法[29]对18.2 tex纱线在速度为10 m/min时分别进行单幅图像纱线直径测量,对比结果如表2所示。

表2 单幅图像检测时间比较Tab.2 Comparison of single image detection time
从表2可以看出,在运动速度相同时,本文算法在检测精度及计算时间上均优于FCM算法,与模板遍历法相比检测精度一致,但相对平均计算时间更短,计算时间减小约30%,算法响应性更高,说明本文算法更适用于纱线的实时检测。
3.2 纱线疵点结果判定与分析
纱线疵点也是评价纱线条干均匀度的一种指标,根据纺织行业标准FZ/T 01050—1997《纺织品 纱线疵点的分级与检验方法 电容式》的定义,常发性疵点有长细节、长粗节以及短粗节3种,其判断标准如表3所示。

表3 3种纱疵判断标准Tab.3 Three criteria for judging yarn defects
根据上述判断标准,本文对3种线密度的纱线提取部分片段在纱线运动速度为10 m/min时进行了检测,并与人工目测结果进行对比,判定结果如表4所示。
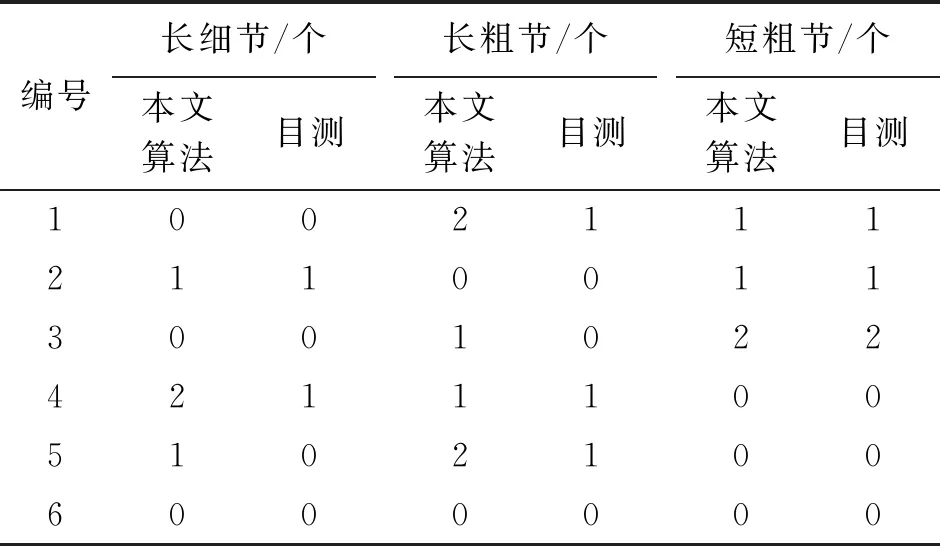
表4 部分纱线疵点判定结果Tab.4 Some judgment results of yarn defect
从表4可以看出,图像法与人工目测法纱疵判定结果较为接近,但由于长细节和长粗节与正常纱线直径相比变化较小,人工较难分辨,图像法则能更好地判定这2类纱疵,且无多余重复判断结果。
4 结 语
本文提出的基于图像特征检测的纱线条干均匀度实时检测方法,在实时检测中对2种方向纱线可自行判断并进行ROI获取,减少处理数据量,并根据SIFT算法计算采集到纱线数据的重合部分并去除,计算纱线直径时加入的纱线倾斜角度对纱线的角度偏移情况具有较好的普适性,保证了数据完整性。且本文算法得到的条干不匀率与Uster Classimat5条干测试仪的测试结果较为一致,并与其他算法检测结果相比,本文提出的方法较为准确,计算速度有所提升,纱线数据也可保证完整不重复,可实现速度在5~30 m/min下的纱线条干均匀度实时检测,为机器视觉及图像处理方法检测纱线条干均匀度提供参考。
当然,本文提出的方法还存在一些不足。目前采集系统使用PLC控制系统,可选择使用更有优势的计算机集成电路控制系统;随着纱线运动速度的增加,纱线抖动程度增大,检测误差也增大,未对采集到纱线图像重影现象进行处理;对于毛、丝、麻等纤维纱线也可进行检测并对比检测结果。在以后的研究工作中,将对提出的方法进行完善改进。
猜你喜欢
作物研究(2023年2期)2023-05-28
黑龙江大学自然科学学报(2021年4期)2021-11-19
纺织科学研究(2021年6期)2021-07-15
高技术通讯(2021年2期)2021-04-13
纺织服装流行趋势展望(2020年3期)2020-02-01
河南畜牧兽医(2020年21期)2020-01-10
测控技术(2018年10期)2018-11-25
计算机应用(2016年10期)2017-05-12
纺织服装流行趋势展望(2016年6期)2016-05-04
纺织服装流行趋势展望(2016年1期)2016-05-04