
商用车电子电气架构发展趋势及其关键技术分析
2023-12-22 06:47陈子邮李一帆
装备制造技术 2023年10期
张 波,陈子邮,李一帆
(东风柳州汽车有限公司,广西 柳州 545000)
0 引言
随着汽车向“电动化、智能化、网联化、共享化、轻量化”不断发展,汽车电子元件数量迅速增加,通信数据呈几何式增长,电子电气架构的设计迎来了新的挑战[1]。电子电气架构开发属于整车电器的顶层设计,是在满足法规要求、功能需求、标杆目标等前提下,通过对功能、性能、成本和装配等各方面进行分析,将车内各控制系统信息转化为实际的控制分配、网络信号、配电布局等电子电气解决方案,最终目标是使整车E/E 系统性能最优、成本最低。正向系统的电子电气架构设计可以避免控制器之间的功能重复或分配不合理,避免线束冗余,缩短样车开发周期,提高产品质量,还可以降低汽车重量,减少制造成本[2]。本文阐述电子电气架构的行业现状,总结主流汽车电子电气架构,提出相关建议供下一代电子电气架构关键技术布局参考。
1 行业发展现状
“电动化、智能化、网联化、共享化、轻量化”的五化发展正在催生电子电气架构发生变革:
(1)电动化:汽车动力模式正在深刻变革,电动化趋势不可逆转。混合动力HEV 模式、插电式混合动力PHEV 模式、e-Power 模式、氢燃料技术搭载在同平台成为需求,对电气架构平台的兼容性提出要求[3]。
(2)智能化:得益于互联网、传感器、AI 算法、人机交互等技术与汽车产业深度融合,使辅助驾驶系统等各项主被动安全、智能座舱等系统技术普遍应用成为可能。为实现越来越复杂的智能化功能,必须自上而下开展正向设计电气架构开发。
(3)网联化、共享化:智慧交通正引领智慧城市的建设,人、车、交通设施、社区、城市等之间的关系正在发生重大改变。为实现人与车、车与车、车与交通的互联互通,在车内必须搭载先进的通讯设备,作为车内交互与车外交互的桥梁。先进的网络架构是高效低延时通讯的基础。
(4)轻量化:轻量化是改善汽车燃料经济性的有效途径,同时轻量化也为客户提供更高附加值的汽车产品,为客户创造价值。通过正向的电气架构开发,采用先进的网络架构,引入高速CAN/LIN、以太网等车载通讯方式,大大减少电线束的数量,成为轻量化的一种有效途径。
为满足上述发展需求,行业衍生出了多种电子电气架构。结合博世公司E/E 架构的定义,下面对各类电子电气架构的技术特点及应用情况进行研究和总结。
1.1 分布式电子电气架构
分布式电子电气架构如图1 所示,使用模块化的控制器来搭建架构,每个ECU 通常只负责控制一个单一的功能单元,彼此独立,分别控制着发动机、制动、车身、车机等部件,通过CAN 总线连接在一起,通过整车预先定义好的通信协议交换信息。在该架构下,各ECU 功能集成相对较低,开发门槛低,可以帮助主机厂充分利用行业成熟、现成的零件资源,满足早期整车产品的快速开发。但同时,它也存在着车内信息孤岛、算力浪费、软硬件耦合深等固有缺陷。
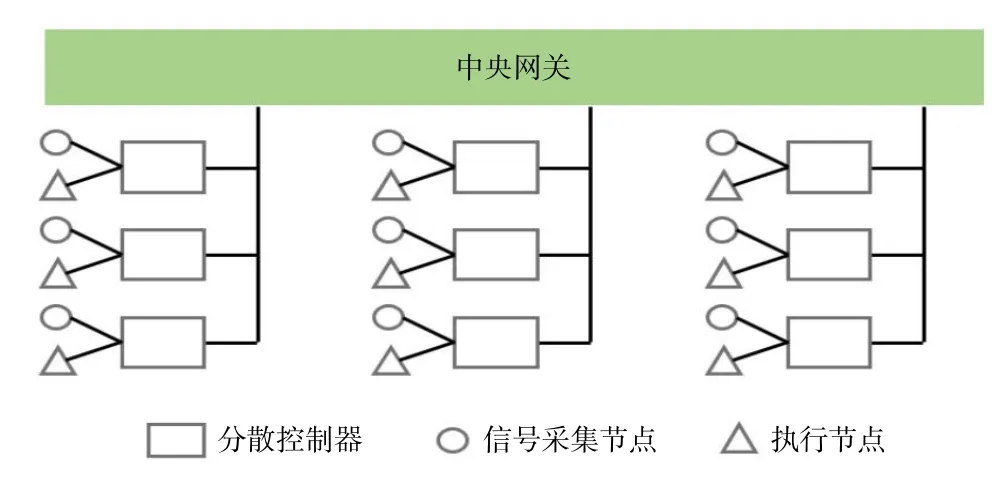
图1 分布式电子电气架构
为满足市场不断新增的功能需求以保持产品竞争力,该架构的普遍做法是增加开发独立控制器、传感器、执行器等来满足额外的电子电气系统需求。故越来越多的传感器和电子控制单元添加到车辆架构中,根据Strategy Analytics 的数据预测,各级别汽车ECU 数量增加明显,一些高端车已经采用超过100个ECU。由于这些特性,传统的分布式架构具有大量冗余、计算能力和通讯带宽不足、不便于软件升级、整车复用性低、造车成本增加等诸多缺点,不能满足未来汽车发展需要[4]。
分布式电子电气架构的技术已非常成熟,相关的零件配套资源比较丰富,东风、解放、重汽等国内主流的商用车均采用这样的EE 架构,量产规模大。
1.2 域集中电子电气架构
为满足汽车的升级需求,功能更集中、算力更高、OTA 升级更快的域集中电子电气架构由此应运而生,如图2 所示。
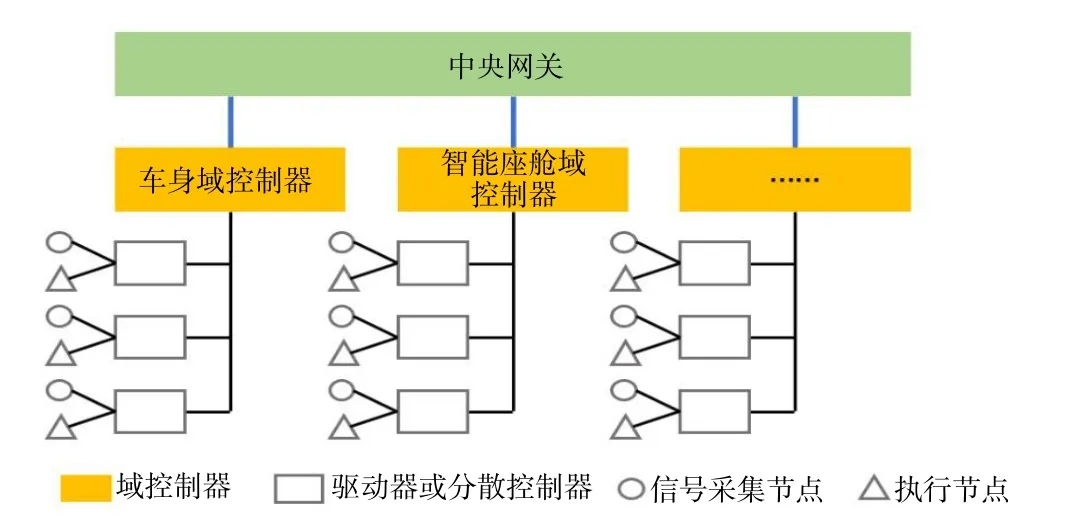
图2 域集中电子电气架构
域控架构的升级方向主要是功能架构、软件架构、网络架构。功能架构从分布式集成向域集成方向发展、软件架构从软硬件高度耦合向分层解耦方向发展、网络架构由LIN/CAN 总线向以太网为主干、总线为子网的方向发展,如表1 所示。
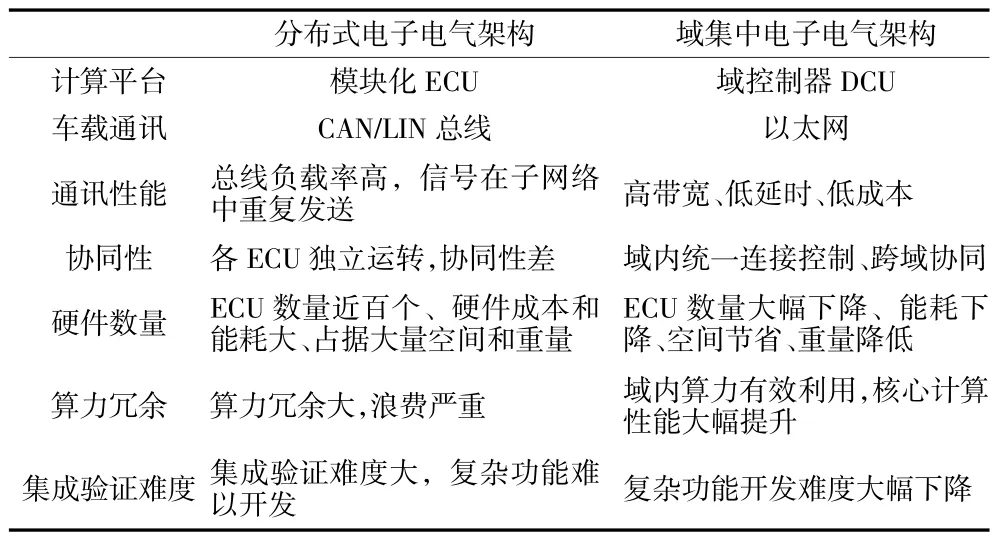
表1 分布式和域集中架构技术对比
域控制器,即将整车功能中属性相似的部分集中在相同的控制器中,集成度较高、算力集中。例如,车灯、雨刮器等车身相关附件会集中在车身控制器中进行统一控制[5]。在域集成的初级阶段,车中一般分为5~7 个域(例如博世划分为动力域、底盘域、车身域、座舱域、自动驾驶域五个域),域控制器即为该功能域的最高决策层。座舱域和自动驾驶域控制器对算力需求较高,处理数据能力极强,称为性能型域控。动力域、底盘域和车身域控制器对算力要求不高,满足通用的控制指令计算和通讯资源即可,该类域控称为集成型域控。在功能域基础上,为进一步降低成本和增强协同,出现了跨域融合,即将多个域融合到一起,由跨域控制单元进行控制,域控制器仍为最高决策层。比如动力域和底盘域它们负责了整车的横向、众向和垂直方向的控制,在智能化车辆尤其是自动驾驶车辆有大量的功能交叉和协同控制,并且在安全架构方面具有相似的需求,可以融合成整车域控,在功能层面、软件层面和硬件层面的设计更优,但对研发能力提出了更高层次的要求。
域集中电子电气架构在商用车上应用具有如下优点:精简电子系统布局,节省空间,利于装配;提高智能化水平,信息集中化处理,提高行驶安全;减少ECU 数量,降低生产成本;提高车辆诊断维修效率,安全防护性能高[6]。相比过去由上百个ECU 组成的汽车电气系统,域集中式的电子电气架构的域处理器数量减少至个位数,更加精简的新架构可以实现整车级空中升级(OTA)、车路协同以及更强的信息安全防护。
域集中EEA 已在国外主流商用车上得到量产应用,国内主机厂处于研发布局阶段,预计2025 年开始逐步应用。BENs-ACTORS 重卡的电子电气架构采用集成化网关结构,并且该车的整车控制器(VCU)也具备网关功能,各个控制器和网关之间可以实现信息交换[7];一汽解放智能驾驶商用车以建设基于域控制器的电子电气架构为未来发展目标;东风商用车正在布局域集中电子电气架构,规划在未来的新平台及自动驾驶车辆上实现平台统一。
乘用车在域控架构的布局相对更早,也提出了多种域控架构的形式。例如,大众全新MEB 平台采用的E3 电子电气架构主要分为3 个ICAS 域控系统[8]。车辆控制服务器ICAS1(In Car application Server1,ICAS1)主要是车内应用服务,依靠网关进行传递的ECU,包括车身控制、电动系统、高压驱动系统、舒适系统、灯具系统等;智能驾驶服务器ICAS2(In Car application Server2,ICAS2)支持高级自动驾驶功能;信息娱乐服务器ICAS3(In Car application Server3,ICAS3)是娱乐系统的域控制器,集成了导航系统、仪表系统、抬头显示、智能座舱等系统的算法和硬件。又如,华为提出的CC 架构将汽车分为智能座舱CDC(Cockpit Super Core,CDC)、整车控制VDC(Vehicle Dynamics Control,VDC)、智能驾驶MDC(Mobile Data Center,MDC)3 个区域,资源与功能解耦,共享资源池,支持软件在线升级、硬件在线更换、传感器可拓展,以达到软件定义汽车的目标。
1.3 车辆集中电子电气架构
随着功能域的深度融合,域集中电子电气架构将升级为车辆集中电子电气架构(图3),中央计算平台成为整车的最高决策模块(通过区域控制器)统一对采集数据进行处理并指挥相关执行机构进行操作。车辆集中EEA 被公认是EEA 发展的终极方向,相较过去它具备显著的技术先进性,如表2 所示。
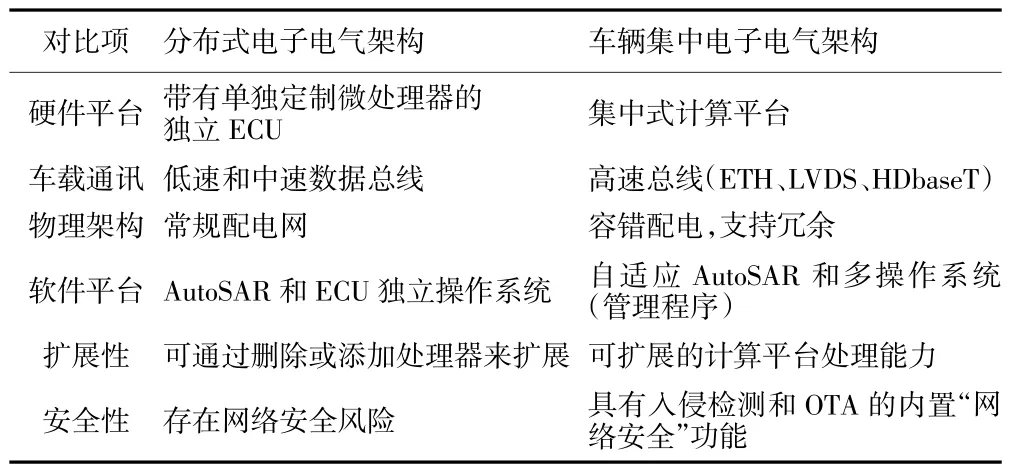
表2 分布式和车辆集中架构技术对比
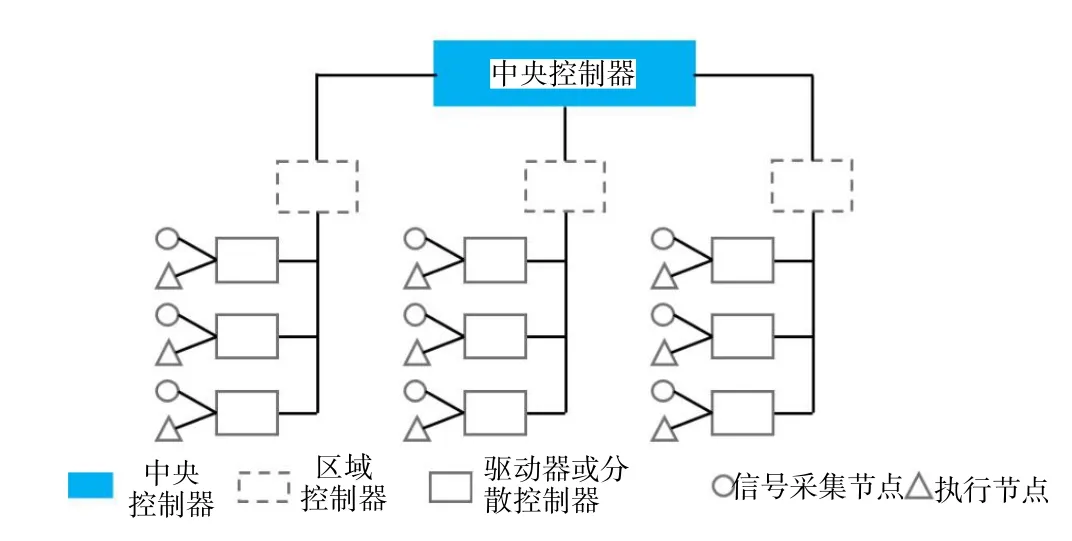
图3 车辆集中电子电气架构
车辆集中EEA 还有个显著特点是功能域跨入位置域(如中域、左域、右域等),区域控制器平台是整车计算系统中某个局部的感知、数据处理、控制与执行单元。它负责连接车上某一个区域内的传感器、执行器以及ECU 等,并负责该位置域内的传感器数据的初步计算和处理,还负责本区域内的网络协议转换。除了考虑位置因素外,还需注意:离散(简单)逻辑和非时间敏感功能适合整合为区域控制器,反之不适合。例如电源分配、车身控制、热管理和空调管理等适合整合;发动机管理、电机控制、车辆稳定性控制等不适合整合。位置域实现就近布置线束,降低成本,减少通信接口,更易于实现线束的自动化组装从而提高效率。传感器、执行器等就近接入到附近的区域控制器中,能更好实现硬件扩展,区域控制器的结构管理更容易。区域接入+中央计算保证了整车架构的稳定性和功能的扩展性,新增的外部部件可以基于区域网关接入,硬件的可插拔设计支持算力不断提升,充足的算力支持应用软件在中央计算平台迭代升级,应用SOA 技术实现真正意义上的“软件定义汽车”。
车辆集中电子电气架构可实现最大化的软硬解耦,但由于芯片/计算平台、操作系统、软件算法等核心技术门槛高,现阶段同时具备上述能力的传统OEM、Tier1、科技企业等公司较少,所以国内商用车暂无应用,乘用车大部分仍处于预研状态,小部分实现量产。该架构行业中应用最成功的车企当属特斯拉,它的Model 3 采用中央计算(CCM 中央计算模块)+区域控制器(前车身、左车身、右车身)的E/E 架构,各控制器通过以太网和CAN/LIN 总线环状链接,支持实现功能冗余等安全需求。丰田公司采用中央计算单元+区域控制器的集中化架构(Central &Zone Concept),突出了集中化中央计算机的作用,满足应对复杂的系统级别需求[9]。全新一代的MAN-TGX 重卡车型的车载互联系统配备中央计算机,这不仅使得MAN-TGX 在分析处理、管理控制等方面更加高效,而且提高了整车传感器的交互性能。
1.4 发展趋势预测
总体来看,电子电气架构由分布式向域集中式升级,最终发展为车辆集中电子电气架构。控制器由模块化控制器过渡至域集中控制器,并进一步实现域融合,最后融合为车载电脑,应用云计算技术最终形成车—云计算式控制器[10]。对国内商用车而言,域集中(域融合)电子电气架构在未来5~10 年将处于主导地位,如表3 所示。
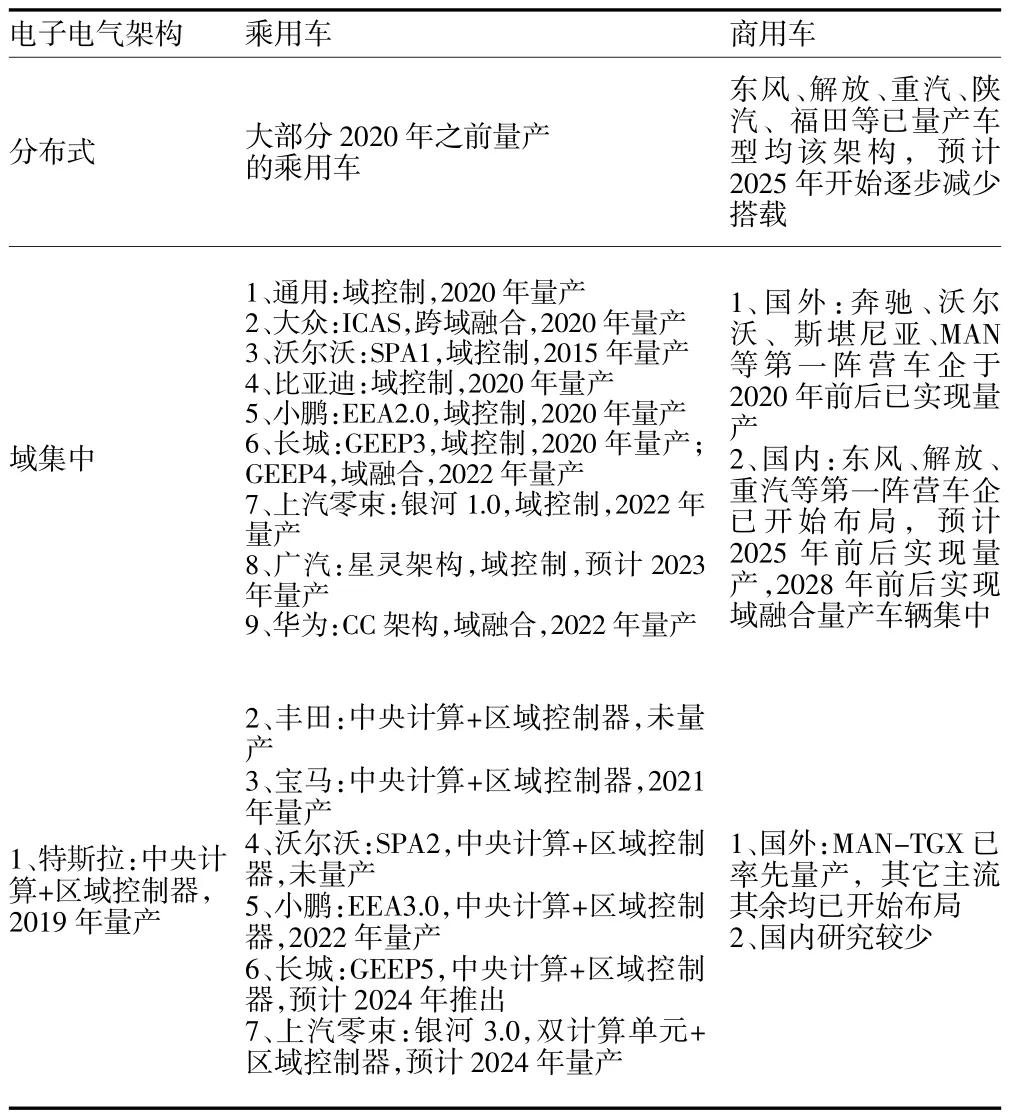
表3 电子电气架构应用现状及未来预测
2 关键技术布局建议
通过对各类电子电气架构的技术特性进行分析可知,智能网联汽车对未来E/E 架构的技术需求包括高计算性能、高通讯带宽、高功能安全性、高网络安全性、软件持续升级更新能力等多方面[11]。为实现E/E架构升级,结合行业国内外发展现状及架构技术需求分析,提出了几项关键技术点的布局建议:域控制器、以太网、功能安全。
2.1 域控制器
域控制器作为域集中EEA 最重要的技术特征,是整车运算决策的中心。它的功能实现主要依赖主控芯片、软件操作系统和中间件、应用算法等多层次的软硬件有机结合。
(1)主控芯片:目前多采用异构多核(AI 单元、计算单元、控制单元)的SOC 芯片,向“CPU+XPU”异构升级。异构多核域控制器方案可兼容多接口和算力要求,实现系统冗余。
(2)软件操作系统和中间件:包含系统内核、基础软件和中间件等,负责对硬件资源合理调配,保证各项智能化功能有序进行。
(3)应用算法:算法模型不断迭代是OTA 升级、功能优化和盈利模式创新的核心。
五大功能域的技术特征如表4 所示。
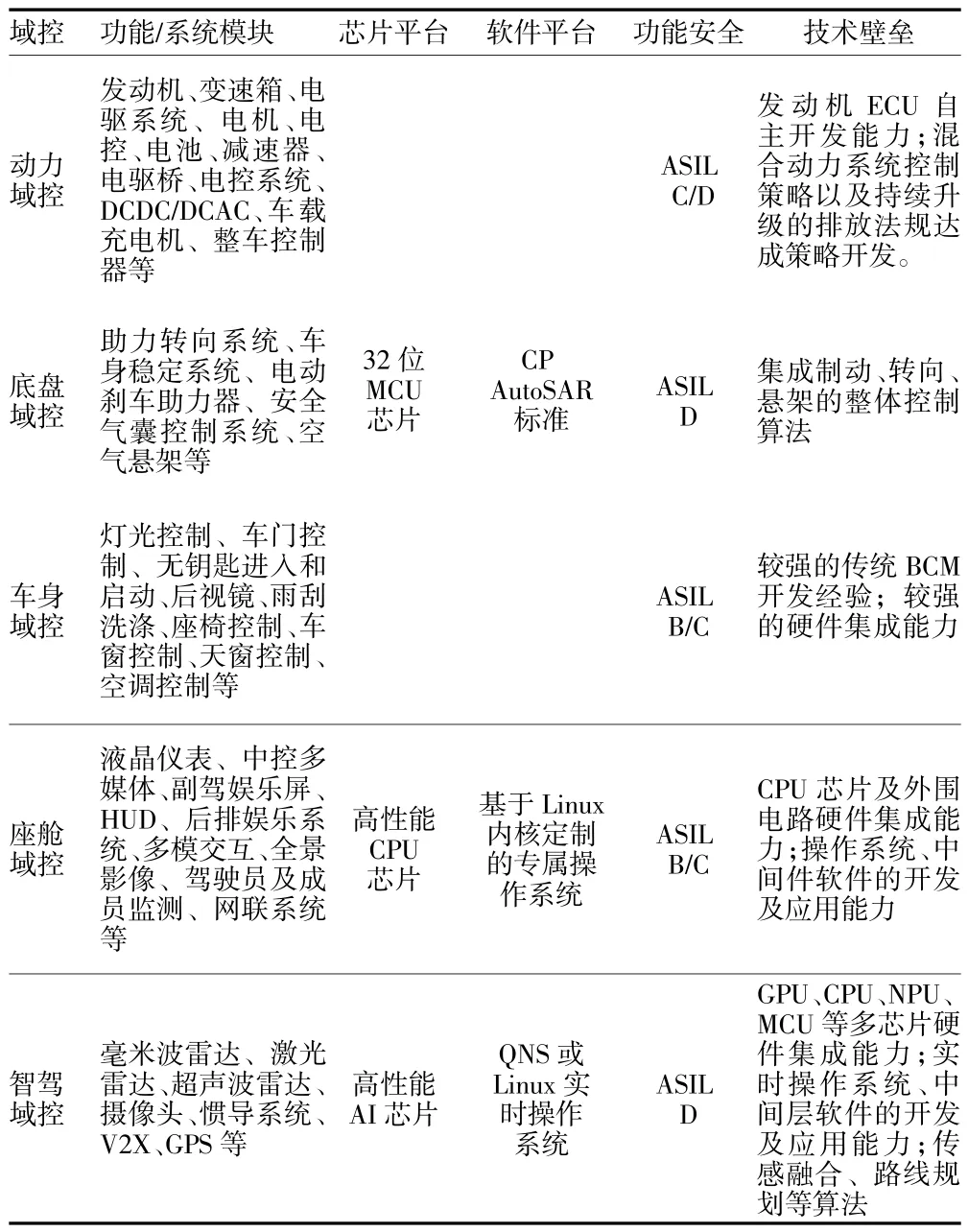
表4 电子电气架构应用现状及未来预测
2.2 以太网
智能化的发展带动了汽车数据内容和传输速度呈指数增长,传统的总线如CAN、LIN、FlexRay、MOST等均无法满足低延时、高带宽的需求[12]。车载以太网在带宽、开放性、可扩展性、物理层传输介质成本等方面都有明显优势,它为车辆驾驶辅助、智能网联通信、高清信息娱乐及诊断的高带宽、低延迟的数据传输带来了可能[13]。
以下为车载以太网的具体优点:
(1)高带宽:远高于CAN 总线的带宽,在满足整车电磁兼容要求的前提下可达到100 Mbps 和1000 Mbps。
(2)低时延:应用精准时间同步、时间触发式等技术实现低时延特性,满足自动驾驶数据、车辆控制指令等高实时性需求。
(3)轻量化和低成本:根据Broadcom 和博世调查数据,达到同等性能条件下,通过使用非屏蔽双绞线的以太网电缆和更小的紧凑型连接器,连接成本最多可降低80%,线缆重量最多可减轻30%[14]。
(4)多应用场景:开放的标准、丰富的上层协议,可满足诊断刷写、主动安全、影音娱乐等应用场景,具备极强的扩展性。
表5 是主流车载通讯技术的技术对比。

表5 车载通讯技术对比
2.3 功能安全
由于电子电气系统原因而引发的安全问题日益突出,功能安全的概念也被各方提及,成为汽车行业开发新趋势。功能安全,即通过安全功能、安全机制和安全措施来避免不可容许的功能风险的技术总称。目前,功能安全技术已有多项国内外法规强制性要求,上升至国家战略层面,也是产品竞争力的重点体现。
参考ISO 26262 和GB/T 34590,功能安全开发主要分为三大块内容(图4):
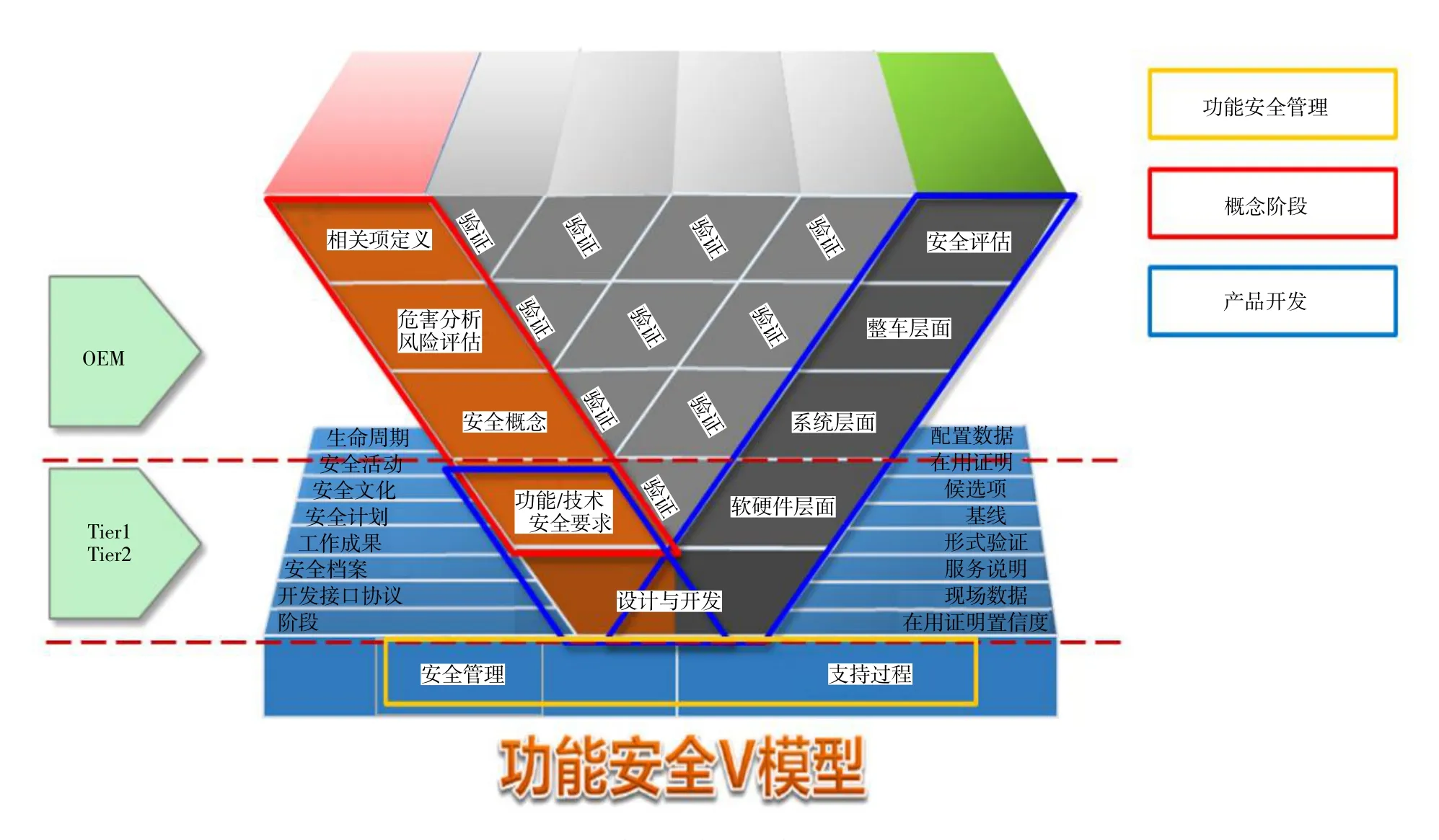
图4 功能安全开发内容及流程
(1)功能安全管理:功能安全开发体系建设和应用。
(2)概念阶段:定义功能的实现方式,对功能进行危害和风险分析,制定功能安全目标和系统要素的安全要求(FSR)。
(3)产品开发:系统、软件、硬件层级的技术安全要求(TSR)和安全机制方案开发,以及功能安全确认、评估及测试。
表6 是功能安全技术布局实施的建议。
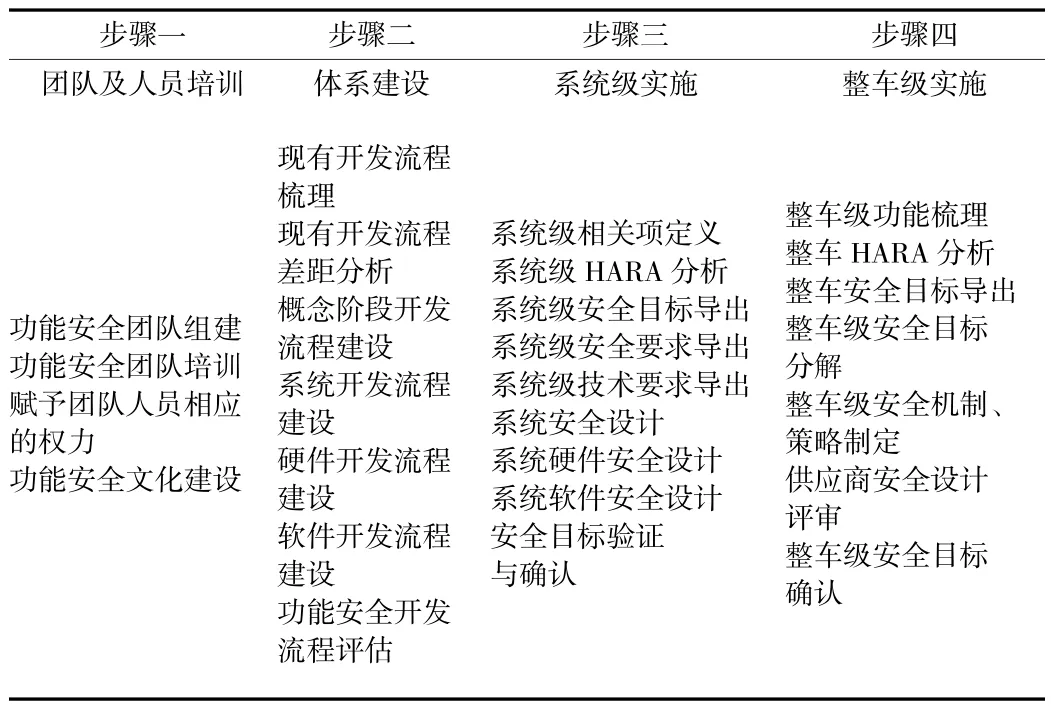
表6 功能安全布局步骤
3 结语
智能网联汽车的快速发展催生电子电气架构换代变革,反过来,电子电气架构的升级也支撑了汽车新五化的发展。本文结合国内外行业应用情况对电子电气架构及相关技术的演变进行了预测,商用车下一代平台将会应用域集中电子电气架构,同时也指出了域控制器、以太网、功能安全等关键技术是这一代架构布局的关键。
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
汽车实用技术(2022年15期)2022-08-19
汽车工程(2021年12期)2021-03-08
网络安全和信息化(2018年12期)2018-12-24
计算机应用(2017年12期)2018-01-08
网络安全和信息化(2017年3期)2017-11-23
电信科学(2017年6期)2017-07-01
网络安全和信息化(2015年8期)2015-12-03
电测与仪表(2015年22期)2015-04-09
噪声与振动控制(2015年4期)2015-01-01
