
机载LIDAR系统校准方案优化设计
2011-09-25 03:58张汉德刘焱雄别君单瑞黄永军张健
海洋通报 2011年1期
张汉德,刘焱雄,别君,单瑞,3,黄永军,张健
(1.中国海监北海航空支队,山东 青岛 266033; 2.国家海洋局第一海洋研究所,山东 青岛 266061;3.青岛海洋地质研究所,山东 青岛 266071; 4.天津海事局海测大队,天津 300220)
机载LIDAR系统校准方案优化设计
张汉德1,刘焱雄2,别君1,单瑞2,3,黄永军4,张健2
(1.中国海监北海航空支队,山东 青岛 266033; 2.国家海洋局第一海洋研究所,山东 青岛 266061;3.青岛海洋地质研究所,山东 青岛 266071; 4.天津海事局海测大队,天津 300220)
为优化机载LIDAR(Light Detection and Ranging)系统校准方案,基于天津、烟台和舟山3个标准检校场的试验数据,分析比较不同检校场地、不同飞行航高和不同飞行航速对激光扫描数据检校结果的影响,探索激光扫描器脉冲能量大小、激光扫描仪视场角、扫描频率等参数设置对激光扫描数据检校结果的影响,最终提供了最优的激光扫描系统校准方案。
机载LIDAR;校准;方案优化
Abstract:To optimize the calibration scheme of airborne LIDAR (Light Detection and Ranging) system, this research aimed at analyzing and comparing the impacts on the calibration results of laser scanning datasets, which were caused by different test area, flying altitude and speed.Three test areas which are Tianjin, Yantai and Zhoushan were employed in the experiment.Besides, some other parameters are considered, such as pulse magnitude of laser scanner, scanning field of view, scanning frequency.In the end, an optimal LIDAR calibration scheme are offered.
Keywords:Airborne LIDAR; calibration; scheme optimization design
1 引 言
我国拥有丰富的海岸带资源。监测海岸带的动态变化是保护、开发和管理海岸带最基础性的工作内容之一。长期以来,由于海岸带地区(特别是沿海滩涂)的环境复杂、勘测条件困难,现有的陆地和船载测量仪器难以有效使用,造成该区域一直依靠人工作业的落后局面,生产效率低、劳动强度大、作业危险性高、空白区域多,测量精度难以满足要求,迫切需要新的技术手段和设备来改变这一现状。
基于激光扫描(Light Detection And Ranging,简称LIDAR)技术的航空遥感调查具有快速、机动、灵活和节省费用等突出优势,能够准确获取地表高精度、高密度的高程数据。该系统不仅能快速获取高程数据,且在遥感测图及其他领域取得了一系列技术突破,在地形测绘、环境检测、三维城市建模、洪水灾害监测、海冰监测等诸多领域具有广泛的发展前景[1-5]。国家海洋局于2006年引进了3套Leica公司的商用机载LIDAR系统,具体型号为ALS50,装备在海洋局下属的3个海监航空支队,主要用于海岸带地区的监测。
机载 LIDAR系统出现的时间不长,不同技术之间的融合问题尚未得到很好的解决,例如,GPS天线的相位中心、LIDAR扫描中心和CCD相机中心并不重合,在使用 LIDAR系统之前,需要标定这些设备之间的系统性差异。由于缺少统一的标准,机载 LIDAR系统校准工作一般都是由作业单位独立完成,方法也不太一样。为了优化机载LIDAR统的校准方案,国家海洋局先后在天津、烟台和舟山建立了3个标准检校场。本文根据标准检校场的试验数据,分析比较了不同检校场地、不同飞行航高和不同飞行航速对激光扫描数据检校结果的影响,探索激光扫描器脉冲能量大小、激光扫描仪视场角、扫描频率等参数设置对激光扫描数据检校结果的影响,拟提供最优的激光扫描系统校准方案。
2 机载LIDAR系统组成
机载LIDAR系统主要有4个组成部分。包括:(1)动态差分 GPS接收机,用于测定激光信号发射时刻参考点的坐标;(2)姿态测量系统,采用惯性测量单元IMU或多GPS天线阵列,用于测定扫描装置主光轴的姿态参数;(3)激光扫描仪,用于测定激光发射参考点至地面激光脚点之间的距离;(4)成相装置(多为CCD相机),记录地面真实影像,为后续数据处理提供参考。工作原理如图1所示[6]。
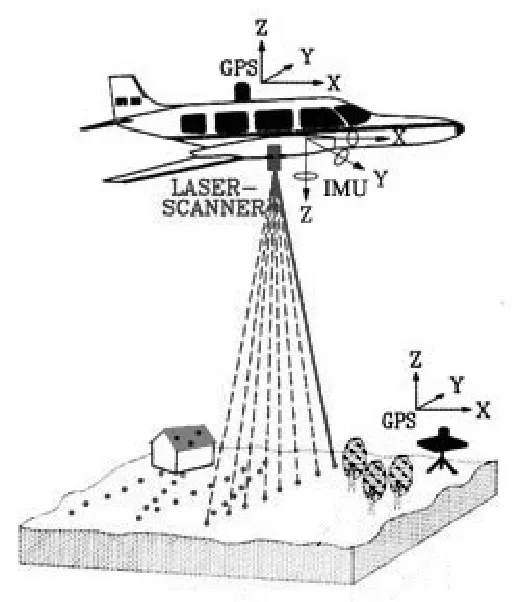
图1 机载LIDAR系统组成及工作原理[6]Fig.1 System components and working principle of airborne LIDAR[6]
机载LIDAR受到多种误差的影响。其中GPS接收机、IMU、激光扫描仪和 CCD等设备的中心不重合、轴向不平行,存在系统性误差。系统误差会给激光脚点的坐标带来系统性的偏差。国内外已有不少学者对影响机载激光扫描测量精度的系统误差进行了分析[7-10],但是对系统校准算法和数据质量控制研究较少。
3 校准试验及方案优化设计
3.1 试验概况
为寻求最优化的机载 LIDAR系统校准方案,根据不同的地形、地貌和地物特征,国家海洋局北海航空支队先后在天津、烟台和舟山建立了标准检校场(如图2-图4)。有针对性地在3个校准场进行了多次校准飞行试验。
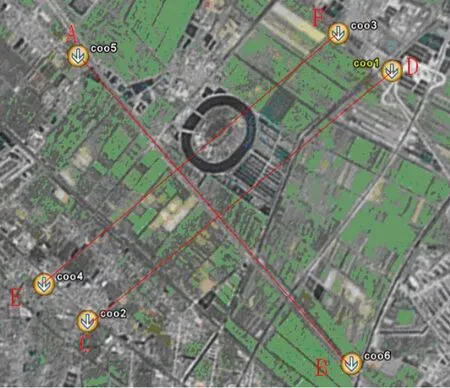
图2 天津校准场及校准航线设计示意图Fig.2 Test area and the flight route design in Tianjin City

图3 烟台校准场及校准航线设计示意图Fig.3 Test area and the flight route design in Yantai City

图4 舟山校准场及校准航线设计示意图Fig.4 Test area and the flight route design in Zhoushan City
针对机载 LIDAR的校准特点,需要设计如下几条航线:
(1)垂直于道路方向,跨越道路,异向重叠的两条航线;
(2)垂直于尖顶房屋的屋脊线方向,经过屋脊正上空,异向重叠的两条航线;
(3)垂直于尖顶房屋屋脊线方向,平行同向的两条航线,两航带数据都覆盖该尖屋顶。
(4)位于道路的正上方,沿着道路方向飞行的一条航线。
在实际工作中,根据具体情况进行航线设计。多数情况下,屋脊线与道路平行,此时(1)和(2)的要求可由两条异向重叠的航线同时满足(如图5中的CD、DC),(2)和(3)也可共用一条航线(如图5中的CD线)。
当集成了CCD相机时,还需针对机载CCD相机的校准特点,设计四条航线,成井字形(如图3和图4中的AB、GH、CD、EF)。
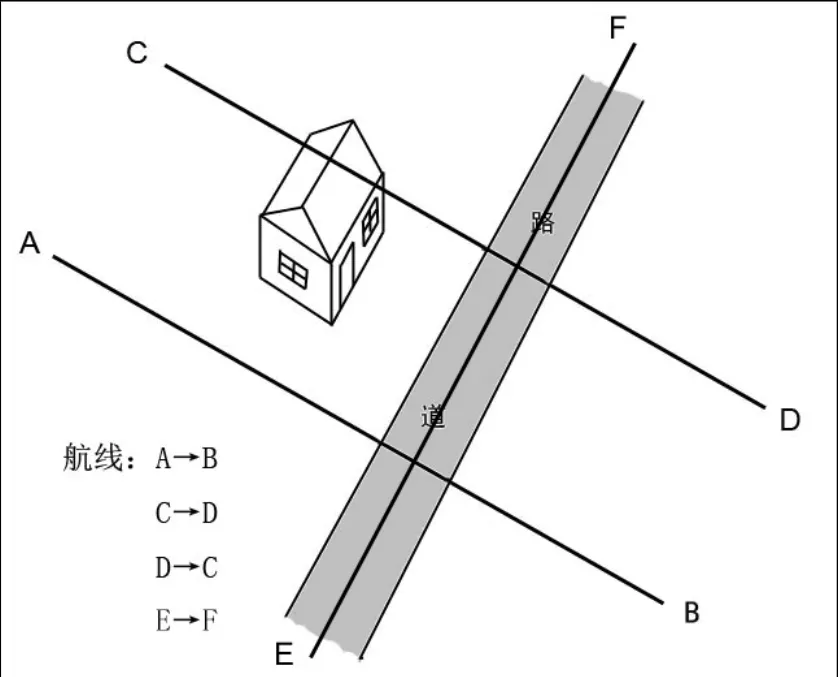
图5 飞行试验航线图Fig.5 Flight route design
3.2 激光扫描器安装角度误差的校准优化
安装激光扫描仪时,其对应的坐标系轴线不可能与飞机坐标系的轴线完全一致,存在侧滚角(Roll)、俯仰角(Pitch)和航偏角(Heading)3个方向的定向误差。定向误差的校准,采用试值法进行求解。
(1)侧滚角(Roll)
选择垂直于道路来回飞行的航线数据(如图5中CD、DC)进行分析。在生成的点云数据中,分别做一个包含道路区域的拟合面(Surface)。在TerraScan中沿道路方向对这两个Surface做道路上的剖面,这两个剖面在竖直方向会存在夹角,量出这两个剖面在两端端点附近的高度差,除以所量两点之间的宽度,得到一个校验值,根据飞行的方向确定校验值的正负,重新输入到ALS PP中再次生成点云数据。重复上面的操作直到两个剖面完全吻合。
(2)俯仰角(Pitch)
选择垂直于尖顶房屋屋脊线方向,在尖屋顶正上空来回飞行的航线数据(如图5中CD、DC)进行分析。在生成的点云数据中画出一块包含这个屋顶的区域,分别做两个Surface。在两个Surface中沿垂直于屋脊线方向分别做这个屋顶的剖面,叠置显示两个剖面。这两个剖面在水平方向上会存在平移,量出这个平移量,除以飞行的高度,得到一个校验值,根据飞行的方向确定校验值的正负,重新输入到ALS PP中再次生成点云数据。重复上面的操作直到两个剖面完全吻合。
(3)航偏角(Heading)
选择垂直于尖顶房屋屋脊线方向,两条平行同向飞行的航线数据进行分析(如图5中AB和CD)。和 Pitch的校验一样,要求包含尖屋顶,在这块区域分别创建Surface。在两个Surface中沿垂直于屋脊线方向分别做这个屋顶的剖面,叠置显示两个剖面。这两个剖面在水平方向上会存在平移,量出这个平移量,除以两条航线之间的距离,得到一个Heading的校验值。根据飞行的方向确定 Heading校验值的正负,重新输入到ALS PP中再次生成点云数据。重复上面的操作直到两个剖面完全吻合。
(4)3个角度的校准顺序
在校准过程中,Roll、Pitch、Heading某一个角度的校准误差会在一定程度上使其他角度的校准效果受到影响,因此往往需循环多次校准。三个角度的校准顺序对最终的校准精度无明显影响,但本次试验结果表明roll→pitch→heading这样的顺序效率最高。
3.3 结果分析及方案优化
(1)基站布设的影响
以天津机场附近试验区为例,共设计了4组不
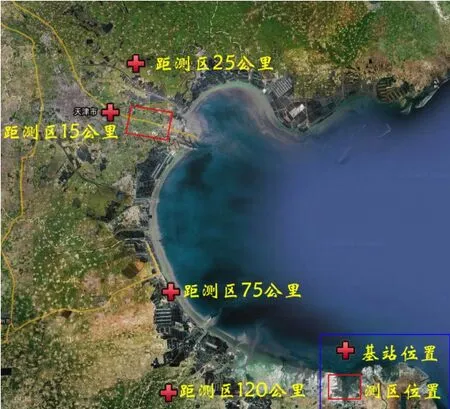
图6 天津基站布设示意图Fig.6 Base station layout diagram of Tianjin test area
同方案,基站架设与测区的距离分别为15 km(机场)、25 km(潘庄)、75 km(南排河)和120 km(大山)。具体位置如图6所示。为检验系统的高程精度,在试验区中,采用GPS RTK测量方法现场测定了24个地面检核点。将利用4组不同基站得到的处理结果与检核点比对,得到高程精度,见表1。
4组结果中,25 km处基站所对应的数据高程精度最低,经分析,该基站周边有较高大的遮挡物,是带来误差的重要因素之一。剩下3个不同距离基站所对应的数据高程中误差随基站距离增大而增大。由此可得,基站架设地点尽可能离测区近(在测区内更好)。另外,基站架设时还应遵循以下原则:周边地面开阔;远离水体;无建筑物遮挡;周围无大型无线电发射及高压电装置。
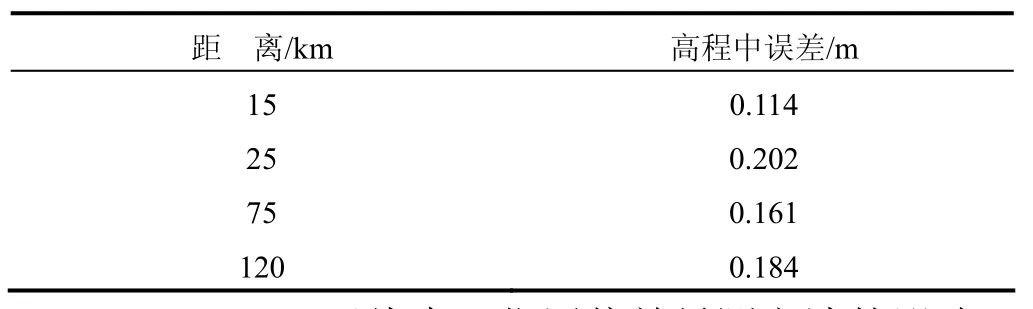
表1 高程精度比对结果Tab.1 Comparing results of elevation accuracy
(2)GPS天线中心位置偏差量测方法的影响
本次试验采用的偏差量测方法有忽略偏差、目视估计量测以及全站仪精确量测3种方法。经过对比研究,以全站仪量测的精度为最高,但也最为费时费力,具体检校时应视数据获取的精度要求来选择所采用的GPS相位偏差量测方法,忽略偏差的方法不可取,精度要求不太高时,用目视估计量测是较为合适的选择。
(3)不同检校场地的影响
校准场地需具备较长且有一定宽度的平坦地面,同时有一个尖顶的房屋。本次试验选取了多种不同质地、不同地物组成的校准场地。试验表明,场地的粗糙度直接影响校准精度,草地、小路等不适合用于Roll值的校准,人工修建的较宽较长且直的水泥或柏油路面为理想的选择;面积大一些的有人字形尖顶的房屋对于Pitch、Heading的校准效果比较好。
(4)不同飞行高度的影响
试验共采用750 m、1 000 m、1 250 m 3组不同航高的校准数据进行对比。结果表明:在可用的平直路面足够长的前提下,飞行高度越高,越容易获得较为准确的Roll校准值。实际工作时,校准飞行高度也不宜过高,一般不超过2 400 m,原因在于航高太高会导致点间距大、测距精度不能保证,同时也会给飞行作业人员带来身体上的不适。
对于Pitch、Heading的校准,飞行高度越低,所获取屋顶上的点密度越大,校准值越准。但是,飞行的最低高度一般不宜低于400 m,以免激光对人眼造成伤害。因此,在实际作业时,应当根据实际需要选择合适的飞行高度。
(5)航速、扫描频率的影响
在其他因素都相同的情况下,不同飞行速度、不同扫描频率影响所获得的检校数据的点间距离不同,点间距小则检校效果好。因此,在系统允许的情况下,航速越慢、扫描频率越高,所获得的数据越有利于检校精度的提高。
(6)视场角的影响
试验采用了 55°和 62°两种不同视场角。视场角大小对校准精度有一定的影响,减小视场角可提高校准精度。因为雷达数据条带的边缘精度比中间的要低,减小了视场角就是提高了雷达数据本身的精度,从而提高了校准结果的精度。
4 总 结
机载LIDAR系统由GPS接收机、IMU、激光扫描仪和DSS相机组成,各设备之间由于几何中心不重合,主要轴向也不平行,对最终的量测结果不可避免地产生系统性差异。为此,在机载 LIDAR系统工作之前,必须进行系统的校准工作,精确地确定各设备之间的位置差异和轴向定位偏差。然而,机载 LIDAR系统是近几年出现的新设备,缺乏统一的校准标准和规范,如何有效地校准上述系统性偏差是最大限度地开发机载 LIDAR系统效率和精度的关键。本文基于天津、烟台和舟山3个标准校准场的飞行试验数据,对于机载LIDAR系统的校准方案优化设计进行了有益的尝试。综合分析了激光扫描器安装角度误差的校准方法和优化方案,也比较了不同基站布设距离、不同校准场地、不同飞行高度、不同航速、不同扫描频率和视场角等因素对校准结果的影响。试验结果显示:(1)对于Roll、Pitch和Heading的校准需要采用迭代方式,并采用Roll→Pitch→Heading这样的顺序效率最高;(2)基站的布设应尽量靠近校准场,采用全站仪测量GPS天线中心和激光扫描仪的中心偏差精度最高;(3)校准场平坦为宜,并有较大的尖顶房屋和笔直宽阔的马路;(4)根据不同的参数校准需求,选择不同的飞行高度,航速越慢、扫描频率越高、视场角越小,越有利于提高校准精度。
[1]JAYD, SATALELM, HAYM, et al.LiDAR in mapping [J / OL].Http: / / www.Gisdevelopment .net/ technology/ gis/.
[2]RUIZ A , GOZALEZ X ,HERMS I, et al.Flood risk mapping based on airborne laser scanner data: Case of The Llobregat River [J / OL].http :/ / www.icc.es/ pdf/ bienni0102/ II_fotogramet ria/ flood_risk.pdf.
[3]HOLLAUS M, WAGNER W, KRAUS K.Airborne laser scanning and usefulness for hydrological models [J].Advances in Geosciences.2005, 5:57-63.
[4]DALAN S, FORSBERG R, KELLER K, et al.Airborne LiDAR measurement s of sea ice north of Greenland and Ellesmere Island 2004 [R].Danish National Space Center Technical Report No.1, 2005.
[5]史照良,曹敏.基于 LiDAR技术的海岛礁、滩涂测绘研究 [J].测绘通报,2007(5):49-53.
[6]BC-CARMS.LiDAR-overview of technology, applications, market features & industry [R].Victoria: Centre for Applied Remote Sensing, Modeling and Simulation, University of Victoria.
[7]李树楷, 薛永祺.高效三维遥感集成技术系统 [M].北京: 科学出版社, 2000.
[8]Ackermann F.Airborne Laser Scanning- Present Status and Future Expectations [J].ISPRS, 1999, 54 (2/3): 64-67.
[9]刘基余, 李松.机载激光测深系统测深误差源的研究 [J].武汉测绘科技大学学报, 2000, 25 (6) : 491-495.
[10]Toni S.Modeling and Recovering Systematic Errors in Airborne Laser Scanners [C].OEEPE Workshop on Airborne Laser Scanning and Interferometric SAR for Detailed Digital Elevation Models, Sweden, 2001.
Optimized design for airborne LIDAR calibration test
ZHANG Han-de1, LIU Yan-xiong2, BIE Jun1,SHAN Rui2,3, HUANG Yong Jun4, ZHANG Jian2
(1.North Sea Branch, SOA, Qingdao 266033, China; 2.The First Institute of Oceanography, SOA, Qingdao 266061, China; 3.Qingdao Institute of Marine Geology, Qingdao 266071, China; 4.Hydro Graphic Surveys Brigade TJ MSA, Tianjin 300222, China)
P237
A
1001-6932(2011)01-0007-05
2010-01-18;收修改稿日期:2010-09-10
海洋公益性行业科研专项经费项目(200705003);863项目(2009AA12Z127)
张汉德(1962-),男,硕士,研究员,主要从事遥感信息应用研究,电子邮箱:99hande@sina.com。
刘焱雄,博士,研究员,电子邮箱:yxliu@fio.org.cn。
猜你喜欢
中国科技纵横(2022年17期)2022-10-25
小哥白尼(神奇星球)(2021年12期)2021-03-08
——工程地质勘察中,一种做交叉剖面的新方法
中国设备工程(2021年2期)2021-01-28
电子制作(2017年8期)2017-06-05
探索科学(2017年4期)2017-05-04
北京航空航天大学学报(2016年6期)2016-11-16
太空探索(2016年5期)2016-07-12
太空探索(2016年6期)2016-07-10
中国交通信息化(2016年8期)2016-06-06
移动通信(2015年17期)2015-08-24
