
一种基于极值寻优的步态识别拒识算法
2017-06-22 14:08金雪松张广元孙华东赵志杰
哈尔滨商业大学学报(自然科学版) 2017年3期
金雪松,张广元,孙华东,刘 阳,赵志杰
(哈尔滨商业大学 计算机与信息学院,哈尔滨 150028)
一种基于极值寻优的步态识别拒识算法
金雪松,张广元,孙华东,刘 阳,赵志杰
(哈尔滨商业大学 计算机与信息学院,哈尔滨 150028)
针对步态识别在实际生活中的应用,通过极值寻优,提出了一种在门禁系统中使用的拒识算法.在拒识算法中,寻找使得训练样本投影后离散程度最小的3个投影方向,并确定投影方向上的识别区间,再采用一定的投票规则实现拒识.实验结果表明,本算法能达到较高的拒识率.
步态识别;拒识算法;离散程度
图像识别是数字图像处理领域的研究热点,尤其是近几年随着计算机技术的快速发展,图像识别的应用越来越广泛.而图像识别中拒识算法一直都是其中的难点.目前拒识算法的研究主要集中在语音识别、笔迹识别等,而针对步态识别中拒识算法的研究较少.
Zhao[1]等通过提取轮廓两个完整周期的较低维数的静态特征和动态特征,使得最终的特征更能反映不同个体之间的步态差异;同时动态特征也避免了轮廓不 完整造成的影响.为进一步提高识别率,采用改进的K近邻法进行分类识别.Zhang[2]等针对模式分类任务中测试样本存在未知类别输入的问题,在稀疏表示分类技术的基础上提出一种在字典学习的目标函数中加入Fisher判别约束,使样本在该字典下分解的系数具有较大的类间散度和较小的类内散度,将训练样本在已学习字典下进行分解,并把分解后的系数构建多个局部线性块,为已构建的线性块建立超球覆盖模型,用于描述训练类样本系数的分布状况.对于测试样本,根据在已学字典下的分解系数是否在训练样本系数的覆盖模型范围内,做出拒识或接受分类处理的判决.He[3]等提出嵌入拒识的极限学习机,不仅充分利用了极限学习机快速的学习能力、良好的泛化性能,而且通过嵌入拒识选项,“拒识”可靠性较低的样本来克服分类正确率较低的问题,使得自动分类过程更加可靠.Robert B·Fisher[4]等提出了一种新的balance-enforced可拒绝优化的树(beotr)活鱼的识别.beotr是基于自动构建类间相似性.事后,使用轨迹投票为了消除分层分类过程中的累积误差,最后应用高斯混合模型和贝叶斯规则作为一种拒绝选项后层次分类评价作为一个特定物种的概率过滤器不太自信决定.Liu[5]等提出一种带有拒识功能的误差编码分类方法.利用纠错编码把多类分类问题转换成多个两类分类,再将拒识的方法应用到每个分类器中,最后结合编码矩阵投票表决得到分类结果,从而提高分类可靠性.Xu[6]提出基于K近邻(KNN)和支持向量域描述(SVDD)的分类器KNN-SVDD(KSVDD).该分类器对单类内部的样本采用SVDD 的判别准则,对类交叉区域及描述边界外的样本采用KNN的判别准则.通过拒绝描述边界外的样本,应用于拒识判别.
在以上的算法中,文献[1]能实现较高的步态识别率,但是没有进一步研究拒识算法.而其他文献中的拒识算法都必须预先知道识别样本和拒识样本的两类数据才能实现.而实际应用中往往只能获得识别样本,而无法事先获得拒识样本.因此本文提出一种基于极值寻优的拒识算法,该算法仅仅利用识别样本就能获得较好的拒识率,实验验证了算法的有效性.
1 特征提取
本文采用文献[1]的步态识别流程:首先将图片预处理、周期检测,然后特征提取,为后期的拒识提供数据支持.数据采集的主要流程如图1所示.

图1 数据采集流程图
预处理过程:首先将样本序列的连续帧提取出来,单独处理一帧图片.将彩色图片转换成灰度图,通过中值算法进行滤波,得到背景图片.然后将每帧灰度图片与背景图片帧差处理,确定合适的阈值,得到连续的二值图像.再用边缘检测sobel算子,提取出人的步态轮廓信息.其中阈值处理后的二值图像图示可能不太理想,通过形态学处理,得到轮廓精确的二值图像.
周期检测:检测每帧轮廓的最大宽度,并记录连续多帧图片的最大宽度,相邻的3个最大宽度之间的连续帧是一个步态周期.将检测到的步态周期存储下来,为后期的特征提取做准备.
角度距离特征:本文提取的特征是角度距离,属于静态特征,维数大,能较好的区分不同的样本.提取一个周期每帧图片的角度距离,从垂直方向开始,每6°一个区间,计算边缘轮廓的像素点与质心的平均距离,再将周期内每帧图片的相同区间的平均距离求平均值作为该样本在这个角度区间里的特征值,最终得到60维的特征向量,如图2所示.
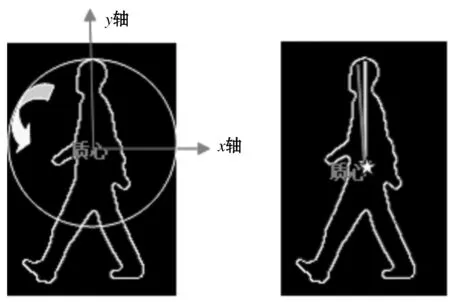
图2 角度距离特征
2 极值寻优拒识算法
2.1 极值寻优
要仅仅通过识别样本来实现拒识,就必须使识别样本在某些投影方向上的离散程度最小,尽可能的使拒识类的测试样本在投影之后落在识别区间之外.
设识别样本集是X={x1,x2,…,xN},其中每个样本是60维的列向量.
投影前的均值:
(1)
离散度矩阵定义为:
s=∑(xi-m)(xi-m)T
(2)
设投影方向为w(w也是60维列向量),样本xi投影后为yi.
投影后的均值和离散度为:
(3)
(4)

(5)
采用拉格朗日寻优求极值,计算如下:
L(w)=wTsw-λ(wTw-1)
(6)
(7)
(8)

2.2 拒识规则
利用公式(8)找到了60个投影方向,并且识别样本在这60个向量投影后的离散度依次增大.
设步态的样本集是x={x1,x2,…,xN},每个样本是60维的列向量.选取投影后离散度最小的投影方向w(w是也是60维的列向量),投影的样本从60维的特征向量降到一维,即投影向量为坐标轴上的一个点:
wTxi=yi(i=1,2,…,N)
(9)
样本集x中的所有样本投影后,得到点集y={y1,y2,…,yN},并组成识别区间[ymin,ymax](其中ymin和ymax分别是y={y1,y2,…,yN}中的小值和最大值).当测试样本z在投影方向w投影后:
wTz=z′
(10)
得到投影后的点z′如果落在识别区间外部,则判定测试样本在该方向拒识;如果落在识别区间内部,则判定测试样本在该方向识别.
选取60个投影方向中测试样本投影后离散度最小的3个投影方向,采用不同投票规则是实现拒识.投票规则一:当3个方向中有一个投影方向能拒识测试样本,则判定该样本能拒识成功;投票规则二:当3个投影方向有两个方向同时能拒识测试样本,则判定该样本能拒识成功;投票规则三:当3个投影方向同时能拒识测试样本时,则判定该测试样本能拒识成功.
3 实验结果
本次实验选取中科院步态识别数据库中100个不同人的数据样本,其中每个人在90°方向上有6个不同的序列,每个序列至少有45帧连续的图片.前20个人为训练样本,后80个人为测试样本.
公式(8)中找到60个投影方向的离散程度不同,实验选取测试样本投影后离散程度最小的前三个投影方向在Matlab上仿真.表1为实验结果.
表1 分别在前3个投影方向的拒识率
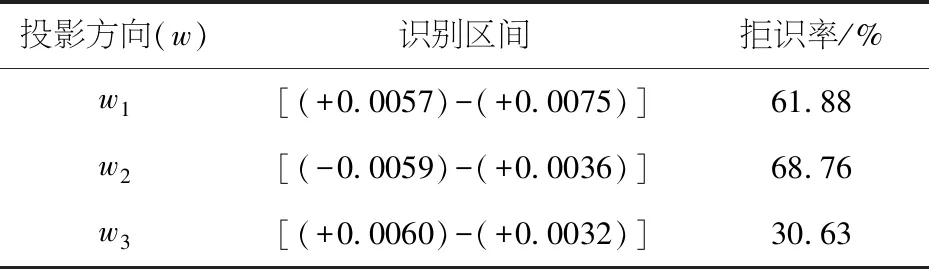
投影方向(w)识别区间拒识率/%w1[(+0 0057)-(+0 0075)]61 88w2[(-0 0059)-(+0 0036)]68 76w3[(+0 0060)-(+0 0032)]30 63
60个投影方向上训练样本投影后的离散程度不同,并且离散程度由特征向量对应的特征值决定.将前42个特征值分成3个不同的数量级,寻找离散程度与拒识率之间的关系.实验结果如表2所示.可见特征值越小,特征向量(投影方向)上的识别样本离散程度越小,拒识率越高.
表2 离散度相差较大的投影方向的拒识率
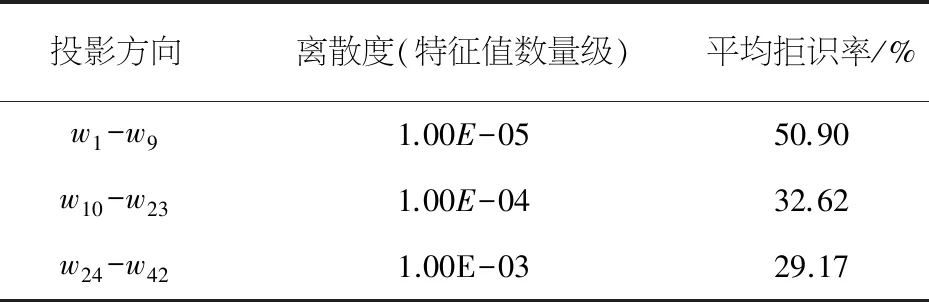
投影方向离散度(特征值数量级)平均拒识率/%w1-w91.00E-0550.90w10-w231.00E-0432.62w24-w421.00E-0329.17
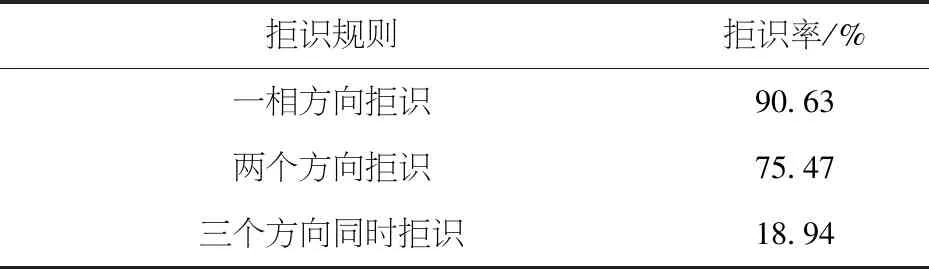
前两次实验都是单个投影方向上的拒识效果,最高的拒识率也不够理想,所以在前3个投影方向上,实验不同的投票规则,尽可能提高拒识率.例如:规则一:当3个方向中有一个投影方向能拒识测试样本,则判定该样本能够成功拒识;规则二:当3个投影方向有两个方向能拒识测试样本,则判定该样本能成功拒识;规则三:当3个投影方向都能拒识测试样本时,则判定该测试样本能成功拒识.实验结果如表3所示.可见规则三在实际应用中的安全性太低,即拒识的成功率太低,导致门禁系统的安全性降低.所以实验结论是采用第一个拒识规则较好,拒识率理想,安全性高.
表3 前3个投影方向不同投票规则的拒识率
拒识规则拒识率/%一相方向拒识90 63两个方向拒识75 47三个方向同时拒识18 94
4 结 语
本文提出一种基于极值寻优的拒识算法,区别于传统的拒识算法,仅仅通过识别样本,找到投影后的离散程度最小的若干投影方向,并确定投影方向上的识别区间,采用不同的投票规则,实现算法的拒识.实验结果验证了该算法的有效性.进一步的工作是减少计算复杂度以期达到更好的实时处理效果.
[1] 赵志杰, 孙小英, 金雪松, 等. 多重图像轮廓特征结合的步态识别算法[J]. 哈尔滨工业大学学报, 2016, 28(4): 182-189.
[2] 廖重阳, 张 洋, 屈光中. 基于Fisher判别字典学习的可拒识模式分类模型[J]. 计算机工程, 2016, 42(4): 202-208.
[3] 何 颖. 嵌入拒识的极限学习机在基因表达数据分类中的应用[J]. 计算机应用与软件, 2015, 32(7): 1846-1851.
[4] HUANG P X, BOOM B J, FISHER R B. Fisher hierarchical classification with reject option for live fish recognition [J]. Machine Vision and Applications, 2015, 26: 89-102.
[5] 刘小和, 潘 皓. 基于拒识的误差编码车辆分类[J]. 科学技术与工程, 2013, 13(30): 8955-8961.
[6] 徐引玲. KSVDD及其在拒识判别中的应用[J]. 计算机工程, 2010, 36(19): 195-198.
Study on reject algorithm in gait recognition based on extremum optimization
JIN Xue-song, ZHANG Guang-yuan, SUN Hua-dong, LIU Yang, ZHAO Zhi-jie
(School of Computer and Information, Harbin University of Commerce, Harbin 150028, China)
Aiming at the application of gait recognition in real life, a reject algorithm of gait recognition used in access control system was proposed through the extremal optimization. In the reject algorithm, three projection directions with the smallest degree of dispersion after the projection and the recognition interval were determined, and then the algorithm was realized by using certain voting rules of reject. The experimental results showed that the algorithm could achieve high reject rate.
gait recognition; reject algorithm; discrete degree
2016-10-21.
金雪松(1975-),男,博士,副教授,研究方向:信号与信息处理.
TP319
A
1672-0946(2017)03-0301-03
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
新世纪智能(数学备考)(2021年10期)2021-12-21
数学物理学报(2021年1期)2021-03-29
河北理科教学研究(2020年3期)2021-01-04
语数外学习·高中版中旬(2020年10期)2020-09-10
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
学生天地·小学低年级版(2019年5期)2019-06-05
学生天地(2019年15期)2019-05-05
中学数学杂志(2019年1期)2019-04-03
电子制作(2018年18期)2018-11-14
