
一种随机森林与深度学习结合的室内定位方法
2020-10-20 05:43谢宏杨环
上海海事大学学报 2020年3期
谢宏 杨环

摘要:为更加实时、精确地识别运输设备的位置信息和特殊货物的位置信息尤其是朝向信息以提高工作效率,利用仿真实验对室内物体进行定位和朝向判断的探究。利用天线阵列布置室内环境,在考虑电磁波极化特性的基础上利用信道传播模型进行建库;利用随机森林进行朝向判断后通过不同的深度学习模型进一步实现定位。实验结果表明:该模型不仅能实现朝向判断,而且其定位误差比仅利用深度学习模型的定位误差降低约0.14 m。
关键词:室内定位; 随机森林; 深度学习; 极化特性; 信道传播模型
中图分类号: TN925
文献标志码:A
An indoor location method combining random forest with deep learning
XIE Hong, YANG Huan
(Information Engineering College, Shanghai Maritime University, Shanghai 201306, China)
Abstract:
In order to identify the position information of transportation equipment and the position information of special goods, especially the orientation information, so as to improve the working efficiency, the simulation experiment is used to explore the position and orientation of indoor objects. The indoor environment is arranged by the antenna array, and the channel propagation model is used to build the database on the basis of considering the polarization characteristics of electromagnetic waves. The random forest is used to judge the orientation and then the location is further realized by different deep learning models. Experimental results show that the model can not only achieve orientation judgment, but also its location error reduces by about 0.14 m compared with that only using the deep learning model.
Key words:
indoor location; random forest; deep learning; polarization characteristic; channel propagation model
0 引 言
在移動设备和互联网高速发展的时代,定位技术的发展推动了各行各业的进步,在仓储物流、机械加工、家电加工等大型制造业搬运区域,各种无人车等机器设备被引入运输作业中,节省了大量的人力,提高了工作效率。全球定位系统(global positioning system,GPS)虽然能够对室外定位技术提供强有力的支撑,但GPS信号因受到建筑物的遮挡而无法到达室内,且室内环境存在信号干扰、多径和非视距等的影响,因此室内定位一直是学者们广泛研究和关注的问题。
基于测距的定位方法有接收信号强度(received signal strength,RSS)、到达时间(time of arrival,TOA)、达到角度(angle of arrival,AOA)和到达时间差(time difference of arrival,TDOA)算法。TOA或AOA算法要求收发端具有严格的时钟同步,而且AOA算法需要接收端电路能够准确获得入射波角度,它们都对接收端提出了较高要求[1]。随着机器学习的广泛应用,RSS算法受到研究者的关注,如:李瑛等[2]通过神经网络拟合RSS与坐标的关系,进而实现定位。随着深度学习的兴起,研究者们将深度学习应用于室内定位上,如:文献[3-4]利用深度置信网络(deep belief networks,DBN)模型对RSS指纹的特征进行训练和测试来实现定位;孙晶[5]使用路径-损耗模型对室内环境进行建模,利用DBN无监督地学习RSS特征,然后利用欧氏距离进行定位。上述文献利用DBN模型对RSS指纹信息进行训练和测试,其定位效果比传统算法模型的好,但DBN模型在表示数据内部特征方面有一定困难,而且学习过程较慢,不合适的参数会导致局部最优解。文献[6-7]提出先利用自编码器(autoencoder,AE)进行RSS特征提取形成指纹库,然后利用邻近法进行匹配定位,但是由于邻近法定位方式很大程度上依赖样本的疏密,对定位精度的提高有限。以往文献有很多关于物体定位的研究,但对于物体在某一位置的朝向以及物体的朝向对定位精度的影响缺乏研究。在实际环境中由于电磁波的极化特性,接收端的RSS会受到收发端天线朝向的影响,从而说明物体的朝向会对定位精度造成一定的影响。另外,一些特殊货物,如不可倒置的装有液体的包装容器、大型设备等,也需要对朝向进行判断。如果能够实时有效地确定物体或设备的位置和朝向,那么一方面可以为无人车等进一步的路径规划提供基础,提高工作效率,另一方面可以对货物进行实时监控。
针对以上问题,本文提出一种基于随机森林(random forest,RF)和深度学习的室内定位方法,分为离线训练和在线定位阶段。离线训练阶段:利用信道传播模型建立数据库,并根据朝向的不同进行深度模型训练。在线定位阶段:利用RF算法进行朝向判断后输入不同的深度学习模型。本文方法既可以对标签的朝向进行判断,又可以对标签进行更精确的定位。
1 定位系统中指纹数据集的建立
1.1 天线传播模型的建立
天线向空间辐射电磁波,电磁波是以波动形式进行传播的电磁场。天线发射和接收的信号符合弗里斯传输公式。贝尔实验室的FRIIS给出了一个用来计算两根天线之间发射功率P1与接收功率P2关系的公式(假设发射天线与接收天线极化匹配):
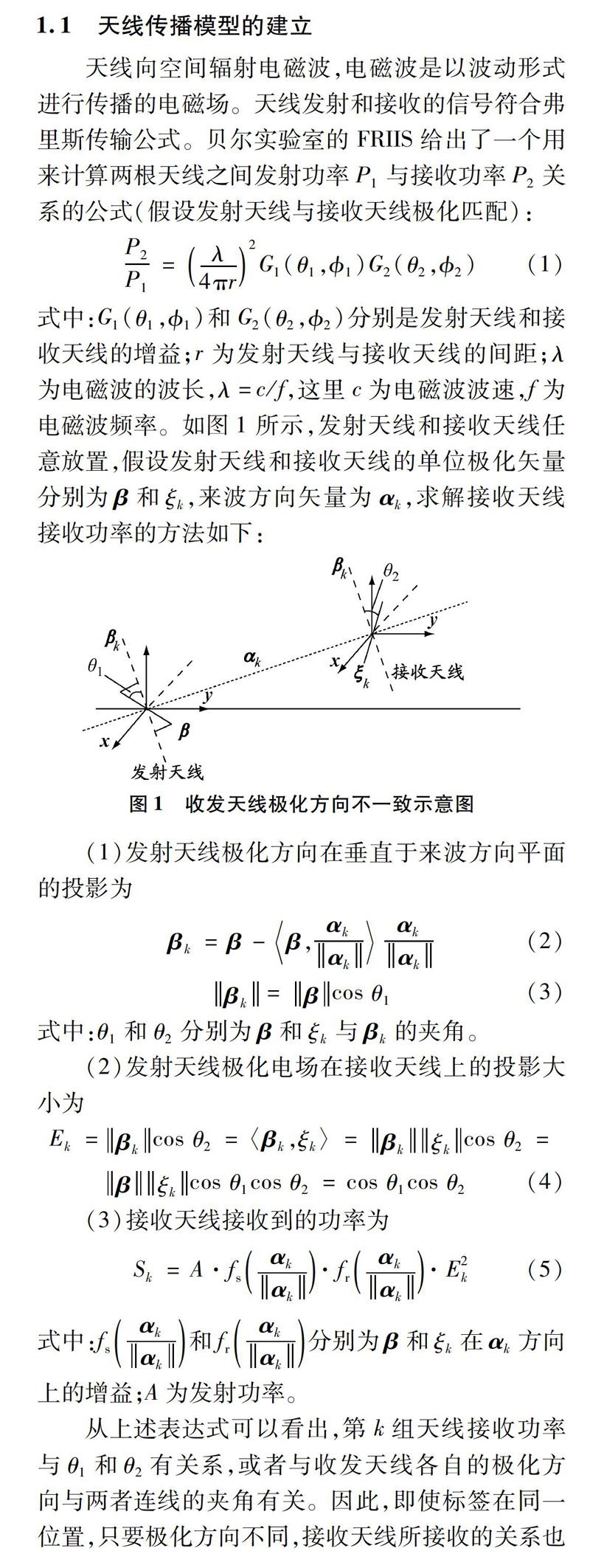
式中:G1(θ1,1)和G2(θ2,2)分別是发射天线和接收天线的增益;r为发射天线与接收天线的间距;λ为电磁波的波长,λ=c/f,这里c为电磁波波速,f为电磁波频率。如图1所示,发射天线和接收天线任
意放置,假设发射天线和接收天线的单位极化矢量
分别为β和ξk,来波方向矢量为αk,求解接收天线接收功率的方法如下:
式中:fsαkαk和frαkαk分别为β和ξk在αk方向上的增益;A为发射功率。
从上述表达式可以看出,第k组天线接收功率与θ1和θ2有关系,或者与收发天线各自的极化方向与两者连线的夹角有关。因此,即使标签在同一位置,只要极化方向不同,接收天线所接收的关系也是不一样的,需要建立映射关系进一步进行分析。
1.2 指纹数据库的获取
数据集建立的主要方法有实地测量法和传播模型法。采用实地测量法获取的数据集一般较为准确,但当服务区域范围比较大时比较费时费力,尤其是当服务区域发生变化或者更换成其他服务区域时,数据集要重新采集。
采用构建传播模型的方式获取数据集的好处在于过程比较快,不受限于固定的区域。当区域发生改变时,数据集更新也更加方便。传播模型主要有路径-损耗模型和信道传播模型。本文使用构建传播模型的方式得到指纹数据库。以往的研究一般使用经验模型得到指纹数据库,本文要解决的是位置和朝向的确定问题,路径-损耗模型不适用,因此采用信道传播模型。具体方法是利用天线阵列进行信号的接收,利用考虑天线极化的弗里斯传输公式,得到每个标签的坐标以及每个坐标处的4个朝向、12根天线接收的信号,记入指纹数据库。
2 算法介绍
2.1 RF原理
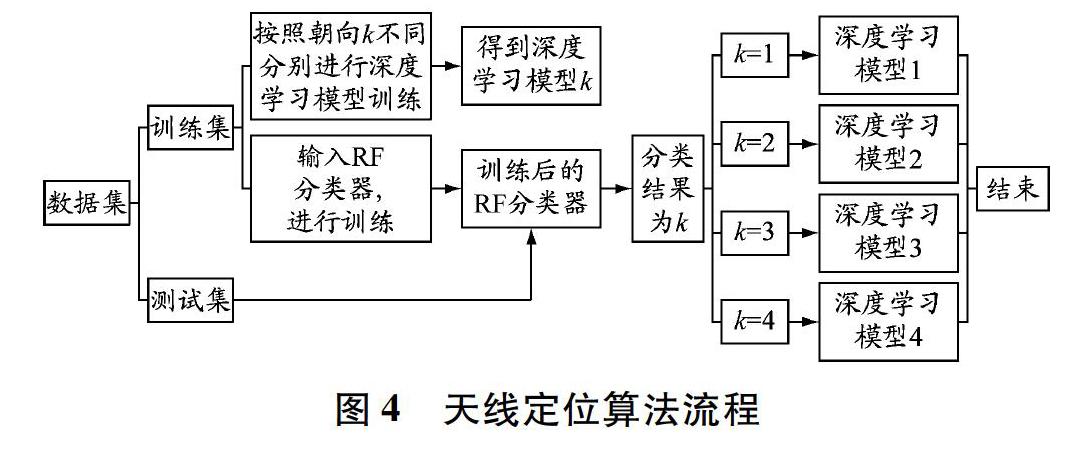
RF在2001年由BREIMAN提出,是一种建立在统计理论基础上的组合分类器。RF分类器的基础是决策树分类器,RF由多棵决策树构成,其决策结果由多棵决策树分类结果的众数决定。RF的基本构建流程是:假设由特征向量样本构成的原始训练集合为Y={X1,X2,…,XN},应用bootstrap方法有放回地每次从Y中随机抽取k个样本,抽取s次,构成自主样本集{Tj}j=1,2,…,s,其中Tj={Xj1,Xj2,…,XjN}。假设每个特征样本Xi具有m个属性(特征分量),随机抽取{Tj}中每个Xji的z(z RF由于具有上述特点,在一定程度上避免了过拟合问题,在分类方面得到了广泛应用。影响RF分类性能的主要因素是:森林中每棵树的分类强度和树间的相关度。在训练中,RF模型需要设置的参数比较多,但在实际使用中主要调节的参数就是决策树的个数和最大特征个数。其调节过程如下: (1)其他参数保持默认值,对决策树的个数从小到大进行遍历;(2)选择使得分类结果正确率最高的决策树的个数R;(3)保持决策树的个数以及其他参数不变,改变参数最大特征数;(4)选择使得分类结果正确率最高的最大特征数M;(5)利用最优的决策树个数R和最大特征数M进行分类。 2.2 深度学习 深度学习的概念由HINTON等2006年提出。研究者对深度学习模型进行了多方面的应用研究,如人脸识别[8]、回归预测[9-10]等,无一不展示了深度学习强大的学习能力。本文利用深度学习对复杂传播模型进行模拟,按照朝向的不同,通过大量的训练样本训练不同的深度学习网络模型。 2.2.1 AE AE是神经网络的一种,其结构与神经网络相同。AE由一个编码器(encoder)函数h=f(x)与一个解码器(decoder)函数r=g(x)组合而成。编码器将输入数据转换成一种不同的表示h,解码器则将这个新的表示转换到原来的形式。因此,AE的目的就是使得输出与原始的输入尽量保持一致。AE结构见图3。 2.2.2 神经网络算法 BP(back propagation)神经网络一般由多层神经元组成的网络结构构成。最基本的BP神经网络由3层构成,分别是输入层、隐含层和输出层。每层都由多个神经元组成。同层神经元之间无连接,后一层神经元的输出是由前一层神经元线性组合后进行函数运算得到的。一般情况下,3层网络结构便可以表示任意非线性函数。网络的训练根据网络的输出与输入的比较结果反向调节权值和阈值,从而使得网络输出更接近理论输出。 2.3 算法过程 2.3.1 数据的获取和处理 按照弗里斯传输公式,在考虑电磁波极化的情况下得出接收天线的信号强度。这里假设发射功率为P1=10 W,工作频率为2 GHz,发射机增益为G1(θ1,1)=sin2θ1,接收机增益为G2(θ2,2)=sin2θ2。按照传播模型得出信号强度。 假设:将n根天线接收信号表示为Ri=(Ri1,Ri2,…,Rin);主要考虑二维平面内的定位,z坐标值为定值,因此建库时不考虑z坐标,天线坐标的位置可表示为(xi,yi);天线朝向序号为k(k=1,2,3,4)。数据库中的第i条指纹就表示为{xi,yi,Ri1,Ri2,…,Rin,k}。 2.3.2 天线定位 天线定位分两步:(1)利用RF算法进行朝向的确定;(2)用不同的深度学习模型进行回归定位。定位具体方法为:(1)将數据随机分为训练集和测试集;(2)将训练数据输入RF分类器进行训练;(3)将训练数据按照4个朝向分为4组训练数据,分别进行深度学习回归定位的训练;(4)将测试数据输入RF分类器,按照分类结果输入对应的深度学习模型进行定位。算法流程见图4。 3 仿真结果及其分析 3.1 仿真环境 此次仿真是利用MATLAB R2015b完成的,在离线建库阶段利用天线的传播模型对室内传播信号的情况进行模拟。此次实验对传播介质、阵列的工作环境、信号以及噪声都进行了合理的理想化假设。在5 m高的房顶选择20 m×20 m的场地,在这个场地中央选取半径为3 m的圆形区域,在圆周上均匀竖直放置6对天线,因此信号强度矢量的长度为12。以圆心为原点建立坐标系,z轴竖直向下。将标签放置在地面上,并在同一位置朝向4个方向,其中x轴正向记为1号方向,x轴负向记为2号方向,y轴正向记为3号方向,y轴负向记为4号方向,每个方向上都得到一条信号强度信息。将位置坐标、信号强度矢量和标签朝向作为一条指纹数据计入数据库。 3.2 实验结果 3.2.1 对测试数据进行方向分类 利用两种方式进行分类,一个是RF分类器分类,另一个是BP神经网络分类。比较两种分类方式的分类效果,进而选择较优的分类器。两种分类方式对标签朝向向判断的准确率随信噪比(signal to noise ratio,SNR)的变化情况见图5。 从图5可以看出当SNR从0变化到30 dB时BP神经网络和RF分类器对标签朝向判断的准确率的变 化情况。1号、2号和3号方向RF分类器对标签朝向判断的准确率基本上都比BP神经网络的高,仅4号方向RF分类器对标签朝向判断的准确率比BP神经网络的略低。由图5e可以看出,整体上RF分类器的分类效果明显比BP神经网络的好。因此,采用RF分类器进行分类,从而确定标签的朝向。 3.2.2 利用深度学习进行定位 为研究物体朝向的确定对定位的重要性,在SNR为20 dB的情况下进行对比实验: 方法一:将训练数据按标签朝向分类后分别输入4个深度学习模型网络,训练完成后将按照朝向分类后的测试数据输入对应的深度学习模型进行定位。 方法二:将训练数据直接输入深度学习模型网络,训练完成后将测试数据直接输入深度学习模型进行定位。 将数据分为训练集和测试集,先后进行两次实验,首先在不区分朝向的情况下直接利用深度学习算法进行定位,然后先区分朝向再进行定位。实验结果见图6。 比较图6a与6b可知,区分朝向的深度学习模型的定位效果直观上比未区分朝向的深度学习模型的好,前者比后者的平均定位误差约小0.14 m。为更加有效地说明实验结论的普遍性,随机选取测试集,进行100次实验,平均定位误差见图7。 由图7可以看出,在100次实验中,在先进行朝向分类,再利用不同的深度学习模型定位的情况下,平均定位误差更低。 4 结束语 针对大型制造业、物流业等运输设备和工作人员在识别货物朝向和位置方面面临的问题,提出一种基于随机森林(RF)和深度学习的定位方法。先利用RF判断标签朝向再利用深度学习进行定位的方法较传统方法显示出了独特的优势,不仅能够确定物体的位置而且能分辨物体的朝向。对不可倒置货物,如电冰箱、装有液体的包装容器等,可以进行实时、准确的朝向判断。该方法增加了物体朝向的判断,因此在一定程度上增加了时间开销,以较低的时间开销为代价获取更为显著的定位效果对于实际定位情况具有更大的意义。由于在实际环境中室内信号的多径、色散等会对信号接收造成一定的影响,下一步将使用实际的发射器和接收器进行实际测量并进行定位实验,以期帮助仓储物流行业、大型制造业、大型商场等对无人车、特殊货物等进行位置和方向的监管。 参考文献: [1]孙豫斌, 黄臻, 高瑞祥, 等. 基于RSS的可见光室内定位系统[J]. 仪表技术与传感器, 2018(11): 80-84. [2]李瑛, 胡志刚. 一种基于BP神经网络的室内定位模型[J]. 计算技术与自动化, 2007, 26(2): 77-80. [3]高欢斌. 基于深度学习的室内定位算法研究[D]. 成都: 电子科技大学, 2016. [4]GAO Lingjun. Channel state information fingerprinting based indoor localization: a deep learning approach[D]. Alabama: Auburn University, 2015. [5]孙晶. 基于深度学习和位置指纹的RFID室内定位算法研究[D]. 长春: 吉林大学, 2018. [6]李嘉俊. 基于深度学习的WiFi室内定位算法研究[D]. 广州: 广东工业大学, 2018. [7]薛伟, 陈璟, 张熠. 基于深度学习的WiFi与iBeacon融合的室内定位方法[J]. 计算机工程与应用, 2019, 55(1): 29-34. DOI: 10.3778/j.issn.1002-8331.1809-0143. [8]UDDIN M Z, HASSAN M M, ALMOGREN A, et al. A facial expression recognition system using robust face features from depth videos and deep learning[J]. Computers & Electrical Engineering, 2017, 63: 114-125. DOI: 10.1016/j.compeleceng.2017.04.019. [9]李彬, 彭曙蓉, 彭君哲, 等. 基于深度學习分位数回归模型的风电功率概率密度预测[J]. 电力自动化设备, 2018, 38(9): 15-20. DOI: 10.16081/j.issn.1006-6047.2018.09.003. [10]MA Xiaolei, YU Haiyang, WANG Yunpeng, et al. Large-scale transportation network congestion evolution prediction using deep learning theory[J]. PLOS ONE, 2015, 10: 1-17. DOI: 10.1371/journal.pone.0119044. (编辑 贾裙平) 收稿日期: 2019-05-16 修回日期: 2019-07-31 基金项目: 国家自然科学基金(61550110252) 作者简介: 谢宏(1962—),男,陕西汉中人,教授,硕导,研究方向为人工智能技术及应用系统,(E-mail)hongxie@shmtu.edu.cn 杨环(1992—),女,山东德州人,硕士研究生,研究方向为移动通信与无线接入技术,(E-mail)1269764506@qq.com
猜你喜欢
安徽农学通报(2017年1期)2017-02-15
软件(2016年7期)2017-02-07
南水北调与水利科技(2016年6期)2017-01-06
新教育时代·教师版(2016年23期)2016-12-06
法制与社会(2016年32期)2016-12-01
电脑知识与技术(2016年25期)2016-11-16
软件导刊(2016年9期)2016-11-07
电脑知识与技术(2016年23期)2016-11-02
软件工程(2016年8期)2016-10-25
电脑知识与技术(2016年21期)2016-10-18
