粒子图像测速中的散斑提取方法
2015-04-17 12:30李木国
实验室研究与探索 2015年11期
杜 海, 李木国, 孟 娟, 马 乐
(1. 大连理工大学 海岸和近海工程国家重点实验室,辽宁 大连 116024;2. 大连海洋大学 信息工程学院,辽宁 大连 116024)
·实验技术·
粒子图像测速中的散斑提取方法
杜 海1, 李木国1, 孟 娟2, 马 乐1
(1. 大连理工大学 海岸和近海工程国家重点实验室,辽宁 大连 116024;2. 大连海洋大学 信息工程学院,辽宁 大连 116024)
研究示踪粒子的成像特点,提出一种适用于粒子图像的散斑提取方法:根据目标连通域的统计特征进行自适应二值化处理;从多个径向判断目标区域是否存在混叠并辩识粒子;提取粒子的中心位置。该方法有效地将粒子图像特征融入到二值化阈值提取与粒子辨识中,从而正确提取粒子的中心。使用粒子图像进行了算法验证。结果表明,所提算法可以有效地对粒子图像中的散斑进行提取,拓展了粒子示踪法在应用时的空间深度。
粒子图像测速; 散斑提取; 二值化; 混叠检测
0 引 言
由于粒子图像测速技术(Particle Image Velocimetry, PIV)基于流动显示技术可以非接触地获得瞬间、全场流动信息,对于流动结构研究极为有益,所以PIV成为现代流场主要测试技术之一。目前,二维PIV技术已发展得较为成熟,业已在海洋工程模型试验中得到了广泛的应用[1-7]。然而,对于三维PIV技术由于透明体重构的技术有待突破,使得其成功的应用较为少见。
当使用摄像机从不同的角度拍摄流场后,可以获得不同时刻多角度的粒子图像序列。三维PIV技术需要将像面中的粒子进行识别,然后依次进行不同角度不同时刻下的同名点对应,得到其位移,从而获得流场的速度分布[8]。因此,从技术难点上可以将三维PIV分为目标识别与同名点对应两个部分。在同名点对应方面,许多的专家学者开展了研究工作,也已取得了一定的进展[9-11]。然而在粒子图像的目标识别方面,所做的研究工作较少。
在二维PIV成像过程中,由于激光片控制得非常薄,处于聚焦面上的示踪粒子成像时不仅亮度差别不大,而且彼此遮挡的情况也较少。然而,当使用三维PIV技术进行流场分析时,往往需要增加脉冲激光片的厚度,这一操作导致了粒子图像分析过程中利用的是一定景深范围下的粒子像。这使得同一幅粒子图像中粒子的灰度差异较大、粒子遮挡现象较多、成像质量降低。因此,若要在图像中成功地识别出粒子,不仅需要能够区分目标与背景,而且还需要判断粒子间是否存在着遮挡。本文立足于示踪粒子成像机理,研究粒子图像的特点,从图像二值化、混叠粒子的辨识角度,提出了一种新的粒子散斑提取方法。最后进行粒子图像分析实验对所提的散斑提取方法进行论证。
1 PIV技术原理
PIV来源于流动显示技术,主要是在透明流体分析过程中撒入一些微小的颗粒(示踪粒子),然后在脉冲激光器的配合下通过摄像机捕获这些小颗粒的运动,并用这些颗粒的运动来表征流体的运动,其原理具体表述如下。
如图1所示,流场中某一粒子a,令x(t)、y(t)、z(t)为该粒子在t时刻的位置,x(t+Δt)、y(t+Δt)与z(t+Δt)表示其在非常短的时间间隔Δt后的位置,那么该处流场的三维速度分量为:
(1)
根据式(1)可知,要在图像分析过程中获得粒子的位移信息,然后配合摄像机的定标参数[12-14],便可以得到该粒子的空间位移信息[15-16],另外,由于在一次实验中Δt是固定的,所以该粒子在笛卡尔坐标系中的速度矢量可以计算得到。因此,当获知足够多粒子的位移情况即可重建整个流场的三维速度分布。
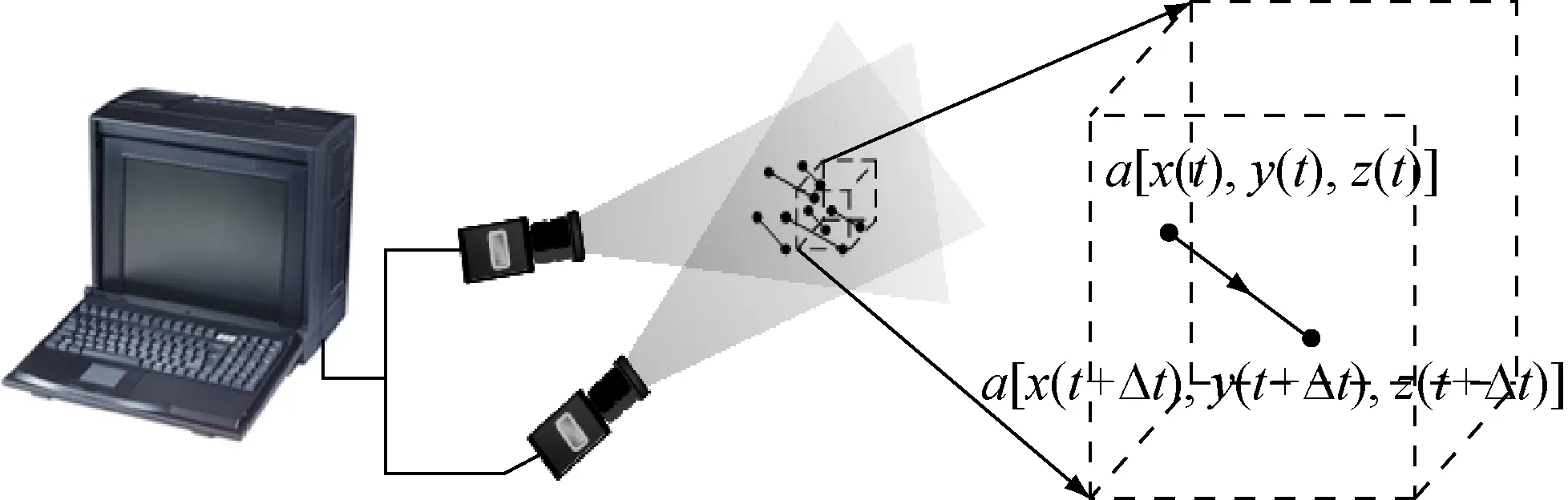
图1 PIV技术原理
2 粒子图像的去噪问题及解决方法
与二维PIV实验过程不同的是,在三维PIV获取图像的过程中,需要将脉冲激光片的厚度从不到1mm调至十几个mm或几十个mm,所获得的粒子图像是在摄像机一定景深范围内所成的像。因此,激光照射下,示踪粒子在像面上进行二维投影时,会有噪声较大、存在遮挡和灰度分布不均匀等现象。如图2(a)所示,由于摄像机景深有限,位于景深范围内的粒子成像清晰,而景深外的粒子模糊不清。虽然景深外的粒子包含着流场信息,但是其数量巨大、遮挡严重、成像质量不高。为了增加粒子的可辨识度,提高成像质量,将图像进行直方图均衡化(原粒子图像直方图见图2(c),均衡后直方图见图2(d)),如图2(b)所示,出现大量难以区分的斑点,掩盖了成像较好的粒子,因此在图像增强后对示踪粒子进行识别,难度会增加。观察图2(a)可以看出,尽管粒子图像分布较为复杂,但是有些粒子在小的局部范围内具有相对高的灰度等级(本文认为这些粒子是有效的可追踪的示踪粒子)。根据该特点,本文提出一种自适应二值化的方法对图像中的有效粒子像进行区域划分。
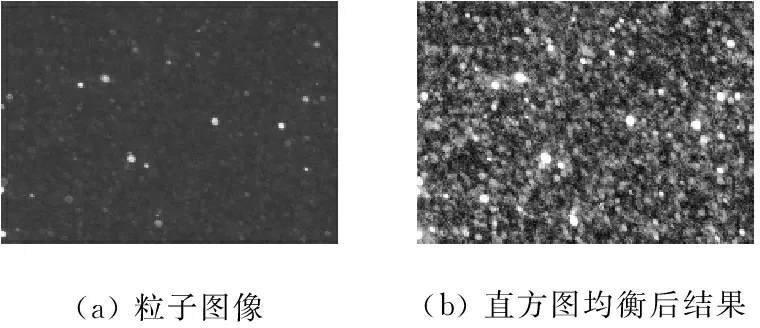
(a)粒子图像(b)直方图均衡后结果
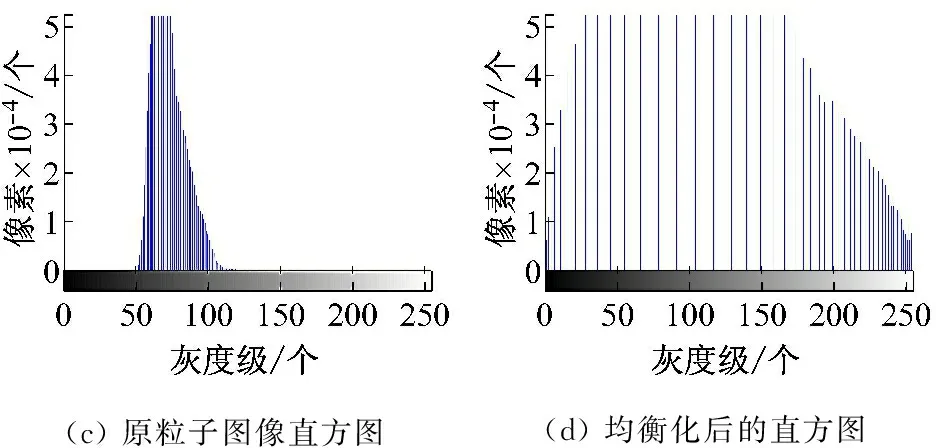
(c)原粒子图像直方图(d)均衡化后的直方图
图2 粒子图像直方图均衡化前后对比
首先,定义二值化阈值:
(2)
其中:L为图像的灰度等级。定义与粒子图像尺寸相当的二值图像BW,对于粒子图像上一点I(u,v),如果该点的灰度大于二值化阈值,认为该点是可能存在粒子的区域;反之,则判定为噪声,那么:
(3)
这样,粒子图像就被划分为多个连通域。连通域的平均像素数为:
(4)
通过实验发现,K随着SP的增大而单调减小,取得最好二值化结果时,K的取值总是围绕在一个特定的值附近,该值记为K′。K′在系统设备参数设置后就不再变化,可通过将它作为确定二值化阈值SP的输入参数。因此,自适应阈值选择归为K逼近K′的过程:
(5)
式中:Δs为搜寻SP的步进量;δK为容差。
3 混叠粒子的鉴别问题及解决方法
当完成前面二值化后,由于局部阈值的大小程度不一样,因此在二值图像上常常将2个或几个邻近的粒子连接在一起,这一问题的存在不仅影响到粒子中心的定位正确性,还会影响到有效粒子的数目,因此需要一种切实之有效的粒子鉴别方法。
研究表明,粒子图像上单个粒子的灰度近似服从高斯分布。则可用下式近似表示其分布规律:
(6)
式中:σ为标准差,它的大小决定了粒子模板上的灰度分布规律,它和半径有关,一般可取为半径的平方的1/2;A表示模板中心点的灰度值;(u0,v0)为粒子的中心点坐标。粒子图像不可避免地存在遮挡现象,难以按照较严格的高斯分布提取粒子。为此,本文提出一种利用多个径向向量来鉴别粒子混叠的方法。
如图3所示,由3个粒子相互遮挡而成的粒子团,令位于最中间的粒子质心坐标为(i,j),定义该处的径向量为:
(7)
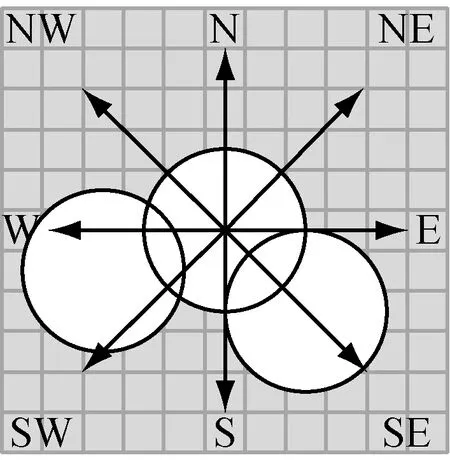
图3 8个方向的径向量
如果其中任意3个径向量满足相同的高斯分布,那么认为该粒子虽被遮挡,但仍可以分辨,如图3中粒子的dNW、dN、dNE满足某参数的高斯分布,那么(i,j)为粒子质心。
实际中,由于粒子制作工艺和成像的原因,即使不存在遮挡的情况,8个方向的径向量之间也会存在偏差,而求取每个径向量满足的高斯分布如果采用拟合的办法则会占据过多的运算开销。考虑到一次实验中,实验设备安装调试完毕后,粒子成像的半径范围基本固定,所以事先建立一个以半径为变量的高斯分布查询表。首先定义误差向量:
(8)
其中,d表示以(i,j)为质心的粒子的径向量;di是它的第i个元素;Ld表示高斯分布查询表中的某行元素;Ldi是它的第i个元素。粒子提取的过程就可描述为:
(9)
其中,δ为可接受的最大误差。该式的意义是,当图像中某极值点的3个或3个以上径向量与高斯分布查询表中某行之间的误差小于可接受的误差时,可认为该点即是粒子的质心,同时该粒子的半径可由对应的高斯分布查询表得知。
4 实验结果与讨论
4.1 粒子图像的二值化滤波评估
为了将图像中的示踪粒子辨别出来,需要对粒子图像进行区域划分。对图4(a)的粒子图像按式(5)进行阈值分析,之后将得到的二值矩阵作为掩模应用于图4(a)后,得到的结果如图4(b)所示。
从图4可以看出,原粒子图像中除了明显的示踪粒子外,还存在着大量的由激光散射形成的模糊粒子像(背景噪声)。使用本文所提方法进行粒子图像滤波后可以将成像较好的有效的示踪粒子提取出来。另外,从图4的分析结果也可以看出,本文所提的粒子图像二值滤波的方法可以在很大的程度上适应粒子的灰度等级,提高了PIV粒子分析的效率。
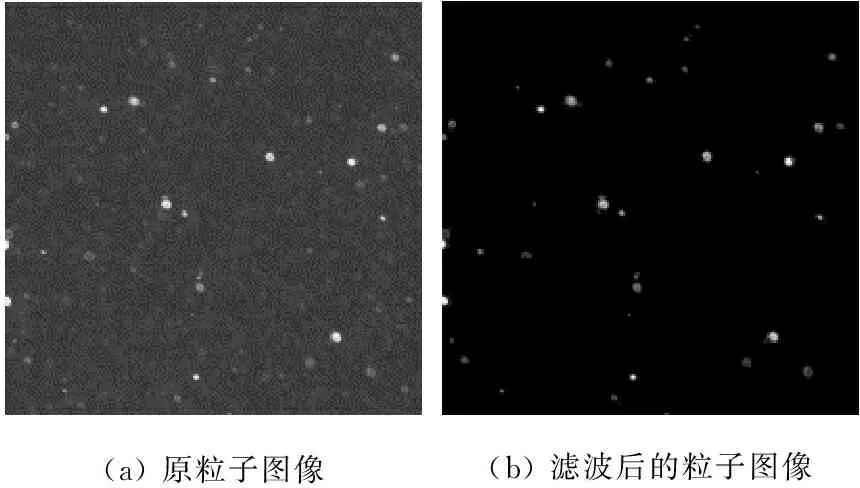
(a)原粒子图像(b)滤波后的粒子图像
图4 噪声滤除效果
4.2 混叠粒子像的辨别实验
为了验证本文所提的粒子混叠鉴别方法的处理效果,使用式(2)~(9)对图5(a)中的粒子图像进行散斑的提取实验:首先对粒子图像进行二值化,得到的结果如图5(b)所示,然后使用本文所提的径向判别的方法对粒子图像中存在混叠的粒子进行判断,判断结果如图5(c)所示。在图5(c)中红色表示能够成功提取的粒子,白色表示未能成功提取的粒子,黄色表示虽然存在遮挡但仍能提取的粒子。最后使用重心法提取粒子中心,粒子分布结果见图5(d)。
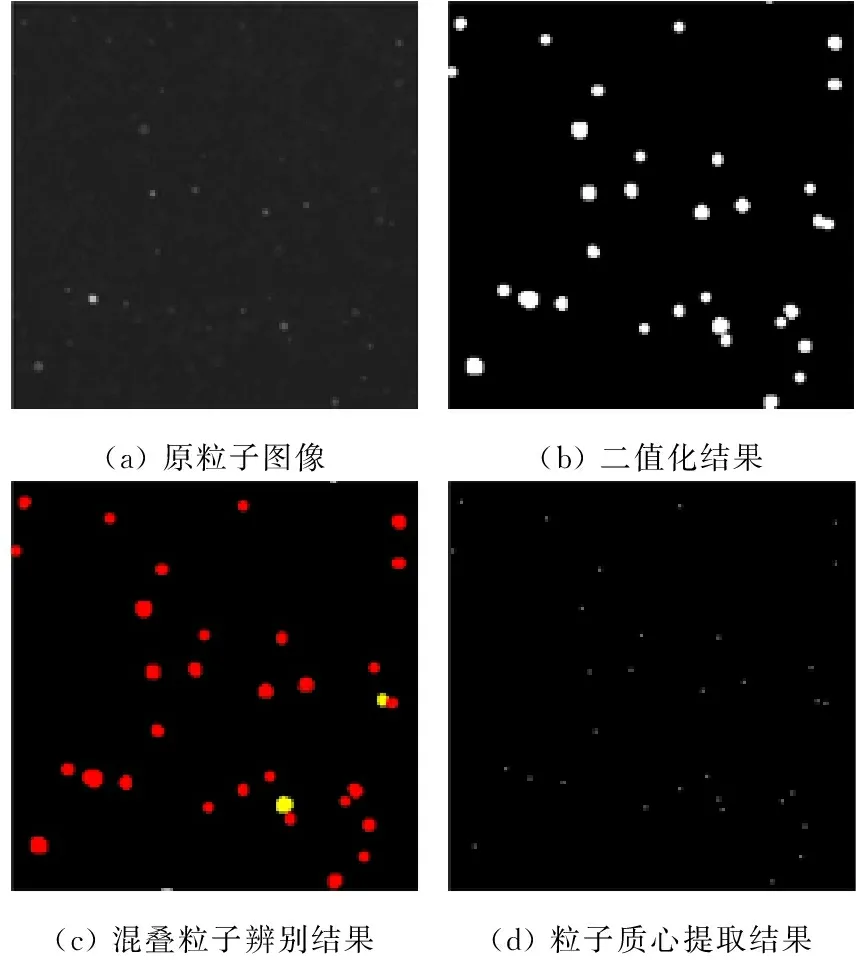
(a)原粒子图像(b)二值化结果(c)混叠粒子辨别结果(d)粒子质心提取结果
图5 粒子提取测试
从图5可以看出,使用本文所提的粒子图像散斑提取方法可以将粒子图像中成像较好的有效示踪粒子查找出来,其中自适应二值化阈值计算方法可以有效地适应一定景深范围下示踪粒子的灰度差异量,而混叠粒子的鉴别方法也可以将二值化后连通在一起的粒子进行有效的鉴别,提高粒子识别的效率。
5 结 语
在粒子图像测速实验过程中,对有效示踪粒子提取的多少严重影响了该测速系统算法分辨率的大小。为此针对粒子提取问题,本文研究粒子图像成像特点,并在此基础上提出了散斑提取的新方法。该方法由两部分组成:①对粒子图像进行自适应二值化阈值分析;②对二值化后连通域进行粒子混叠的辨别。其中自适应阈值计算方法利用了粒子图像中有效粒子的区域分布稳定性的特点对阈值进行迭代计算,而混叠粒子的辨别方法则使用了8个方向的径向向量来进行高斯分布的判断。在本方法的提出过程中充分考虑了实际现场中粒子图像测速的应用特点,考虑了算法的可操作性,使之尽可能的适应多数实验环境。最后,通过粒子图像进行了算法评估,并对结果进行了分析与讨论。结果表明,本文算法能够有效的对粒子图像中的散斑进行提取,为三维PIV下一阶段的追踪分析提供保障。
[1] Kolehmainen J, Elfvengren J, Saarenrinne P. A measurement-integrated solution for particle image velocimetry and volume fraction measurements in a fluidized bed [J]. International Journal of Multiphase Flow, 2013, 56: 72-80.
[2] Senatore C, Wulfmeier M, Vlahinic I,etal. Design and implementation of a particle image velocimetry method for analysis of running gear-soil interaction [J]. Journal of Terramechanics, 2013, 50: 311-326.
[3] 王波兰,宗昕,顾蕴松. PIV技术在复杂二相流场中的应用 [J]. 实验流体力学, 2014, 28(1): 60-64.
[4] 付东伟, 陈 勇, 陈衍顺, 等. 方形人工鱼礁单体流场效应的PIV试验研究 [J]. 大连海洋大学学报, 2014,29(1): 82-85.
[5] 黄 湛,王法伟,张 妍,等. 高超声速飞行器DPIV内流阻力测量技术研究 [J]. 推进技术, 2014, 35(4): 455-462.
[6] 董周宾, 颜丹平, 张自力. 基于粒子图像测速系统的砂箱模拟实验方法研究与实例分析[J]. 现代地质, 2014, 28(2): 321-330.
[7] Wang Haoli, Wang Yuan. Measurement of water flow rate in microchannels based n the microfluidic particle image velocimetry [J]. Measurement, 2009, 42: 119-126.
[8] Gallo D, Gulan U, Stefano A D,etal. Analysis of thoracic aorta hemodynamics using 3D particle tracking velocimetry and computational fluid dynamics [J]. Journal of Biomechanics, 2014, 47: 3149-3155.
[9] 简 鸣, 朱一丁. 准定常流动瞬态速度场的一种PIV查询算法 [J]. 南阳理工学院学报, 2014, 6(3): 44-46.
[10] Soares R R, Barbosa H C, Braga R A,etal. Biospeckle PIV for analyzing fluid flow [J]. Flow Easurement and Instrumentation, 2013, 30: 90-98.
[11] Satake S, Sorimachi G, Masuda N,etal. Special-purpose computer for Particle Image Velocimetry [J]. Computer Physics Communications, 2011, 182: 1178-1182.
[12] Sun Junhua, Chen Xu, Gong Zheng,etal. Accurate camera calibration with distortion models using sphere images [J].Optics & Laser Technology, 2015, 65: 83-87.
[13] 王俊修, 张倩倩. 摄像机自标定技术研究与应用 [J]. 计算机仿真, 2014, 31(7): 219-224.
[14] 霍洪峰, 赵焕彬. 运动图像解析标定框架改进及算法 [J]. 实验室研究与探索, 2014, 33(2): 27-30.
[15] 付 强, 王春平. 一种点目标三维重构的新算法 [J]. 科学技术与工程, 2008, 8(3): 643-647.
[16] Xue Ting, Qu Liqun, Cao Zhaofeng,etal. Three-dimensional feature parameters measurement of bubbles in gas-liquid two-phase flow based on virtual stereo vision [J]. Flow Measurement and Instrumentation, 2012, 27: 29-36.
The Study on Speckle Extraction Method of Particle Image Velocimetry
DUHai1,LIMu-guo1,MENGJuan2,MALe1
(1. State Key Laboratory of Coastal and Offshore Engineering, Dalian University of Technology, Dalian 116024, China; 2. School of Information Engineering, Dalian Ocean University, Dalian 116023, China)
When one uses particle tracking method to do fluid researches within 3D space, the particle aliasing often causes tracking errors. In order to solve identification problem caused by particle mixture images, a new speckle extraction method is presented by studying on the distribution features of particle images. In the proposed algorithm, a new adaptive binarization is used to eliminate noise firstly. And, the mixture particles are distinguished by radius directions fitting method, and then particle centers are found. Using the proposed method, particles within a thickness laser slice can be detected correctly. At last, particle images are tested. The experimental results show that the proposed method is an effective and robust algorithm for extracting speckles in particle image.
particle image velocimetry; speckle extraction; binarization; mixture detection
2015-01-30
国家自然科学基金项目(编号61202253)
杜 海(1980-),男,河北石家庄人,工程师,现主要从事非接触式测量技术研究。
Tel.:13795121877;E-mail: duhai@dlut.edu.cn
O 353.5
A
1006-7167(2015)11-0004-04
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
数字通信世界(2021年3期)2021-04-09
上海电机学院学报(2021年5期)2021-02-11
数字通信世界(2021年2期)2021-01-13
湖北理工学院学报(2020年4期)2020-08-22
摄影之友(影像视觉)(2018年12期)2019-01-28
雷达学报(2017年3期)2018-01-19
计算机应用与软件(2017年4期)2017-04-24
初中生世界·八年级(2017年3期)2017-03-24
潍坊学院学报(2016年6期)2016-04-18