
基于运动控制卡的开放式数控系统研究与开发
2016-05-28 03:33王谦
宿州教育学院学报 2016年2期
关键词:数控系统
王谦
(宿州职业技术学院 安徽·宿州 234000)
基于运动控制卡的开放式数控系统研究与开发
王谦
(宿州职业技术学院安徽·宿州234000)
摘要:对基于PC+运动控制卡的开放式数控系统进行了研究与开发,首先设计了此开放式数控系统的体系结构,然后通过硬件组建连接及软件系统开发组建了一个基于运动控制卡的开放式数控系统,并实现了数控系统的基本功能,同时阐述了该系统的硬件结构组成和软件功能模块的开发原理。实践证明这种开放式数控系统具有开发周期短、开发成本低、灵活性强、控制精度高等优点。
关键词:数控系统;开放式结构;运动控制卡
传统数控系统有着体系封闭、兼容性差、功能不易扩展、人机界面不丰富等缺点,给机床制造商的生产和最终用户的使用、升级等带来诸多不便,也使得数控系统很难应用上计算机技术和网络技术的最新成果,这些都阻碍了数控技术的进一步发展。为解决上述问题,PC技术开始融入数控技术领域,从上世纪九十年代开始,国外许多企业和研究机构在基于PC的开放式数控系统上做了大量的研究工作,取得了一系列的成果。研究成果表明,开放式数控系统可成功地解决上述问题,是未来数控系统的发展方向。
1 开放式数控系统的组建结构
1.1开放式数控系统的常见组建形式
目前大多数的开放式数控系统都是以PC机为平台进行体系组建的。开放式数控系统可以利用PC机标准化、高性能的硬件资源来选配自身硬件设备,体现其硬件设备的标准性、灵活性和高运算速度;利用PC机丰富的软件资源和强大的开发工具来进行数控系统控制功能的开发、软件功能的扩展及人机界面、通讯联网等功能的丰富。目前通过PC_NC形式来组建开放式数控系统的方式主要有三种: PC嵌入NC型、NC嵌入PC型、纯PC全软件型。
(1)PC嵌入NC型。这种结构是在传统的专用数控系统上扩展出PC接口,PC通过计算机总线连接到传统专用数控上。这种结构的优点是传统专用数控不需要做改动就可以工作,嵌入的PC机则可以用来处理非实时的任务。但这种结构保留了原有数控系统的封闭性,它的开放性只限于嵌入的PC部分。
(2)NC嵌入PC型。这种结构是将整个NC功能硬件插入到PC的扩展槽中,PC和NC之间通过PC总线进行连接和通讯。这种结构一般采用上、下位机的交互通讯模式。这种结构具有上、下两级的开放性,且开发成本较低。
(3)纯PC全软件型。这种结构将数控系统看作是PC机上的一个应用软件,数控系统的所有控制功能均由安装在PC机上的控制软件来实现。它的硬件部分基本上只含PC机、伺服系统及相应接口。这种数控系统具有完全开放的体系结构。但这种结构的软件开发具有相当的技术难度。
上述三种组建形式中,PC嵌入NC型的开放程度较低且其仍依赖于传统的封闭的数控系统技术。纯PC全软件型的硬件成本最低,但是软件的开发最复杂,不易于实现。NC嵌入PC型的结构紧凑、开放程度较高、易于实现,因此在实际中被广泛的应用,是开放式数控系统体系的主要组建形式。
1.2基于PC+运动控制卡的开放式数控系统的结构分析
本文参照欧洲OSACA开放式数控系统的标准体系,以PC机为平台,采用NC嵌入PC型的组建形式,设计开发了基于“PC+运动控制卡”的开放式数控系统,其体系结构如图1所示:
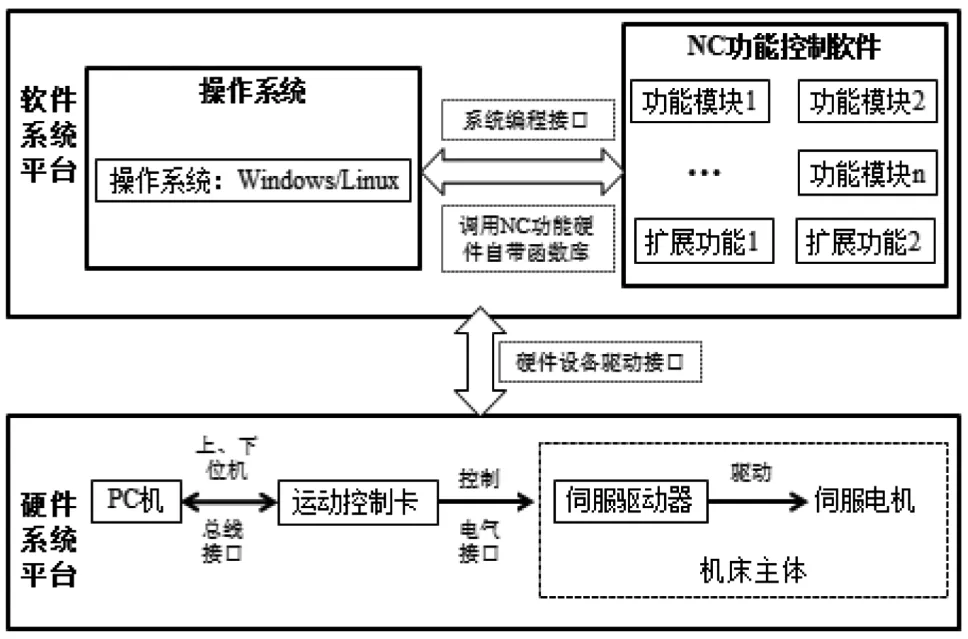
图1 开放式数控系统的体系结构
这种开放式数控系统采用两级计算机的上、下位机结构,上位机是PC机,下位机是运动控制卡。PC机负责人机交互、程序编辑和监控等非实时处理,用户在开发的人机交互界面中,可以建立与运动控制卡的通讯,设置运动控制卡的相关参数,通过安装在PC机上的CAM软件生成数控加工程序,并将其传送给运动控制卡,可以让运动控制卡执行该程序,同时还可以监视运动控制卡中的各种开关、运动信息等;运动控制卡负责机床的运动控制和逻辑控制等实时控制,它既要执行PC机发来的运动程序和PLC程序,完成插补运算、位置控制、刀补、速度处理、PLC控制等实时控制,又要不断地向人机交互界面反馈各轴当前坐标、各种开关、运动参数等信息。上位机和下位机之间的通讯和控制靠开发专门的软件来实现。
这种结构具有上、下两级的开放性。在软件方面,可以利用PC机丰富的软件资源和开发工具,对软件功能进行扩展和丰富,可以对运动控制卡的函数库进行深层开发,以扩充它的控制功能;在硬件方面,PC机的硬件已经标准化、通用化,完全满足互换性的要求,运动控制卡通常有专用或通用的,而且厂商会不定时推出升级产品,开发者可根据实际需要有针对性的进行选择,以提升数控系统的适用性和性能。
2 硬件系统平台的组建及连接
2.1硬件系统平台的构建设计
通常数控系统由数控装置和伺服系统两部分组成,各公司的数控系统产品也是将两者作为一体的。数控装置是控制机床运动的中枢系统,通常包括以下几个部分:中央处理单元、ROM、RAM、I/O设备、操作面板、显示器等;它的基本任务是根据接收到的NC控制指令,参考系统的编译规则对指令进行编译,翻译成伺服系统能够识别的控制信号,并将结果由输出装置送到各坐标控制的伺服系统。伺服系统的基本任务是接收数控装置发出的指令信号,控制机床执行部件以特定的运动参数完成零件的自动加工动作,它主要包括伺服驱动器和伺服电机。
本文是在原Leadway_v450数控加工中心的基础上开发的基于“PC+运动控制卡”的开放式数控系统,同样从数控装置和伺服系统两个方面来搭建硬件系统平台。伺服系统采用原加工中心自带的,其伺服系统由主轴系统、伺服驱动器和伺服电机组成,而主轴系统也是由伺服驱动器驱动的,因此在这方面只需要做好运动控制卡与伺服驱动器的连接即可,让运动控制卡可以控制原伺服驱动器。数控装置方面由PC机、运动控制卡、端子板、键盘、鼠标等外设构成,其中运动控制卡是整个数控装置的核心部件。硬件系统平台的整体构建设计如图2所示:
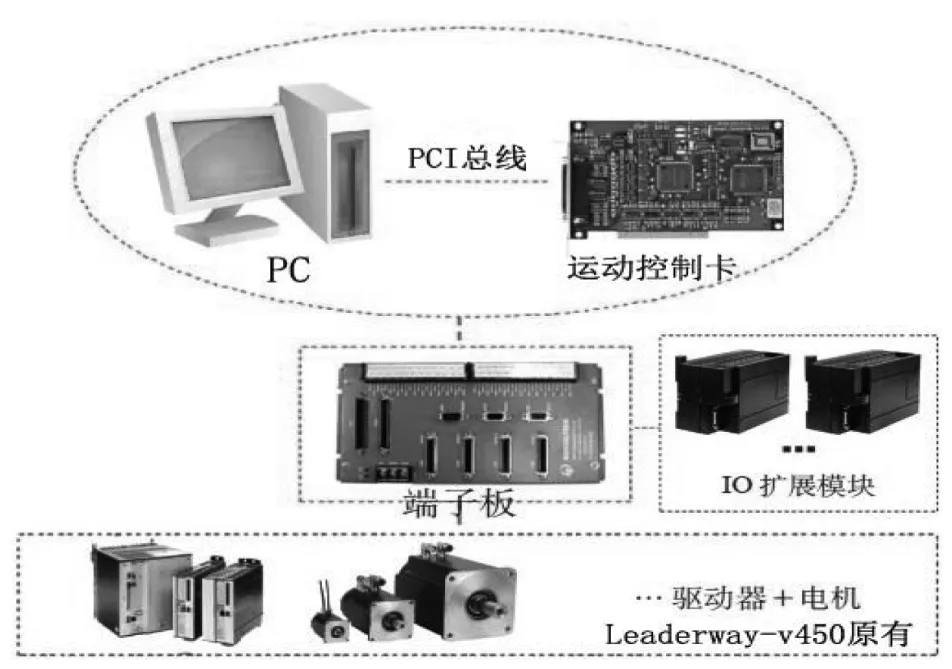
图2 硬件系统平台的整体构建设计
2.2固高运动控制卡简介
在本文所开发的开放式数控系统中,运动控制卡最终实现机床的数控功能,是整个数控装置的核心部件。在满足功能需求又兼顾经济性的条件下,本文运动控制卡选用的是深圳固高科技生产的GT_400_SV_PCI。该运动控制卡的核心处理器由ADSP2182数字信号处理器和FPGA组成,DSP具有优越的高速数据处理功能,FPGA具有超强的逻辑处理功能,二者结合在一起使运动控制卡的性能更加地优越,可以实现高性能的控制计算;该卡采用PCI总线与计算机相连,它可以同步控制四个运动轴,支持多轴直线插补和圆弧插补;该产品具有梯形曲线、S型曲线、JOG模式等点位运动规划功能,它还具有电子齿轮同步运动规划功能,可以实现高速点位运动控制和高性能的多轴协调运动控制。
软件上,固高运动控制卡提供了由高级语言编写的函数库,该函数库包含了数控机床基本的控制功能,并以动态链接库的形式提供给开发者使用。开发者可以使用支持动态链接库的软件开发工具来开发应用程序以实现复杂的控制功能。
3 软件系统的开发
3.1 NC功能控制软件的总体层次设计
开放式数控系统的软件系统包括操作系统和NC功能控制软件两个部分,软件系统的开发主要是指NC功能控制软件的开发。为了方便开发者进行NC软件的开发,通常将数控系统应具备的所有功能以模块化的方式进行划分,先划分大的模块,再逐级细分,最后将数控系统的所有功能划分为一个个的基础功能模块,开发者只要能通过软件开发将所有的基础功能模块实现,便可实现数控系统的所有功能。NC功能控制软件其实就是由所有的基础功能模块组成的模块库。
参照传统数控系统,可以将数控系统软件部分的功能划分为系统管理类功能模块和系统控制类功能模块。系统管理类功能模块主要负责对系统的监管,保证系统的正常运行,以及为系统控制功能模块提供必要的支持和服务,它包括系统通讯、系统初始化、参数管理、系统显示、NC程序管理、故障诊断等模块;系统控制类功能模块主要负责提供数控系统完成加工功能所必须的服务,具体包括NC程序预处理、刀具补偿、自动运行、手动运行、运动监视、I/O控制等模块。
3.2基础功能模块的软件开发原理及实现机制
固高GT_400_SV_PCI运动控制卡提供了由高级语言VC++编写的函数库GT400.d11,并以动态链接库的形式提供给用户使用。该函数库中含有200多个最基本的控制函数,基本囊括了运动控制卡所有的最基本、最底层的控制功能,用户可以使用支持动态链接库的高级编程语言如VC++、VB、De1Phi等来开发应用程序,通过在应用程序中调用库中的函数来实现特定的控制功能。单个函数功能比较单一,实现某一基本数控功能往往需要调用多个函数组合才能完成。NC软件基础功能模块的开发过程其实就是使用高级编程语言编写程序、在程序中调用函数的过程;基础功能模块的实现过程其实就是通过编写的程序让运动控制卡完成调用函数的过程。基础功能模块的开发原理及实现机制如图3所示:
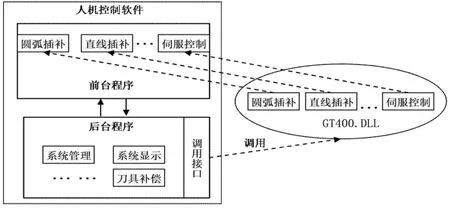
图3 各基础功能模块的开发原理及实现机制
图4所示为使用VC++编程语言针对坐标轴回零功能模块的开发所编写的程序内容,从图中可以看出为实现这一基本功能模块,程序中组合调用了函数库GT400.d11中的多个基本函数(GT_开头的均为函数库中的函数)。
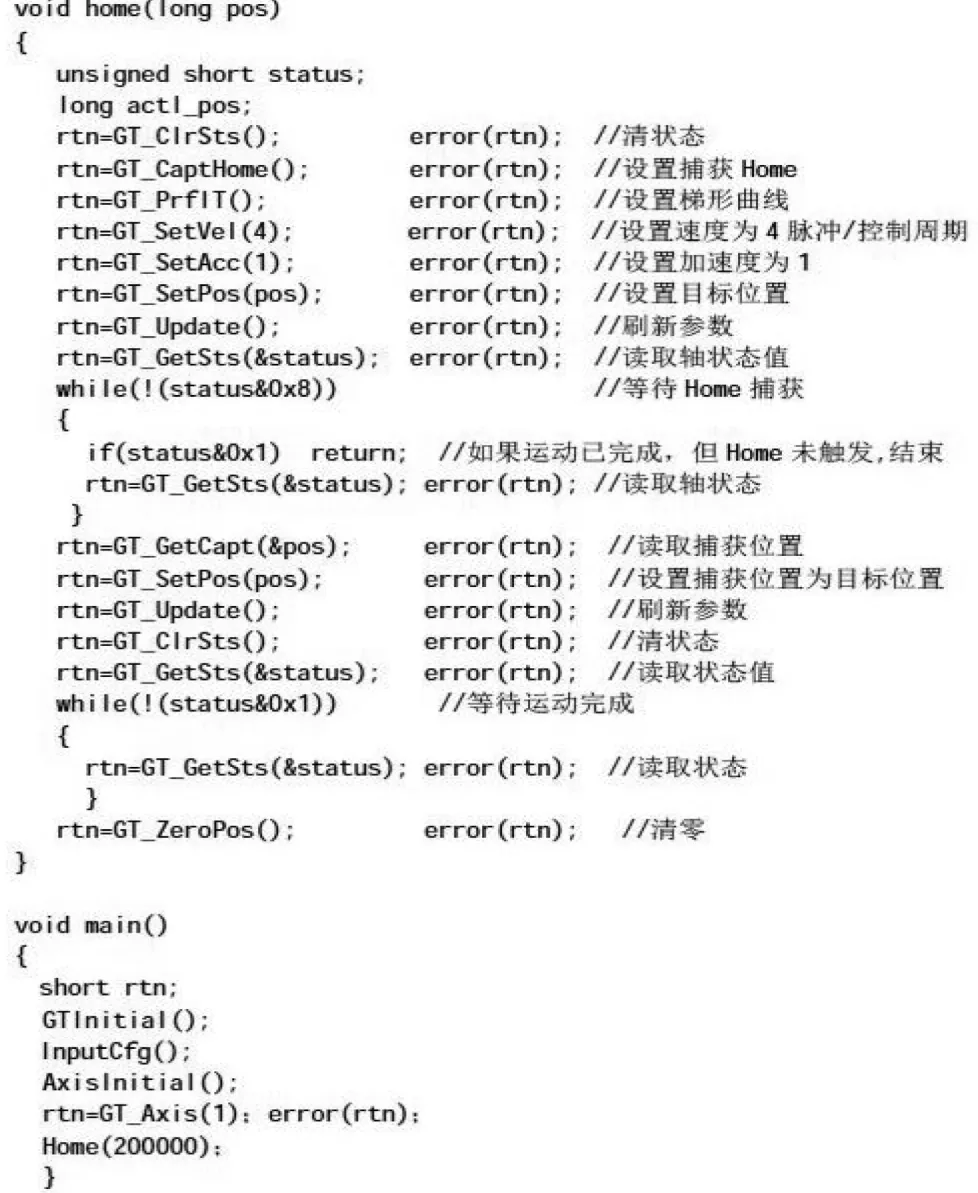
图4 坐标轴回零功能模块的程序编写
4 开放式数控系统的调试及软件功能测试
硬件系统平台的调试主要通过以下步骤完成,如图5所示:
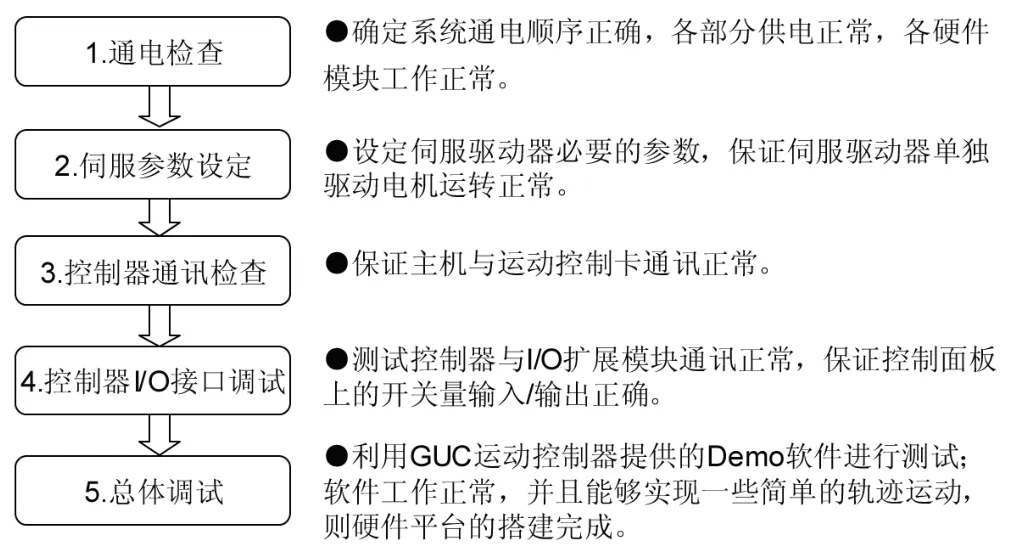
图5 硬件系统平台调试过程
经过硬件平台的调试,确定硬件平台的连接没有问题之后,本文对系统的多轴运动控制功能做了一个简单测试。首先写了一个简单的三轴联动G代码程序(在XY平面的运动居多),然后通过开发的NC控制软件编译并驱动组建的开放式数控系统运行该程序,在主轴上装了一支铅笔用于描绘XY平面走刀轨迹,运行结束后对铅笔描绘轨迹进行了测量,G代码程序的仿真驱动界面和实际运行轨迹如图6和7所示:证明开发的开放式数控系统具有三轴联动轨迹控制功能,且精度良好。接着本文又对此数控系统的其他基本功能一一做了测试,都得到了实现。
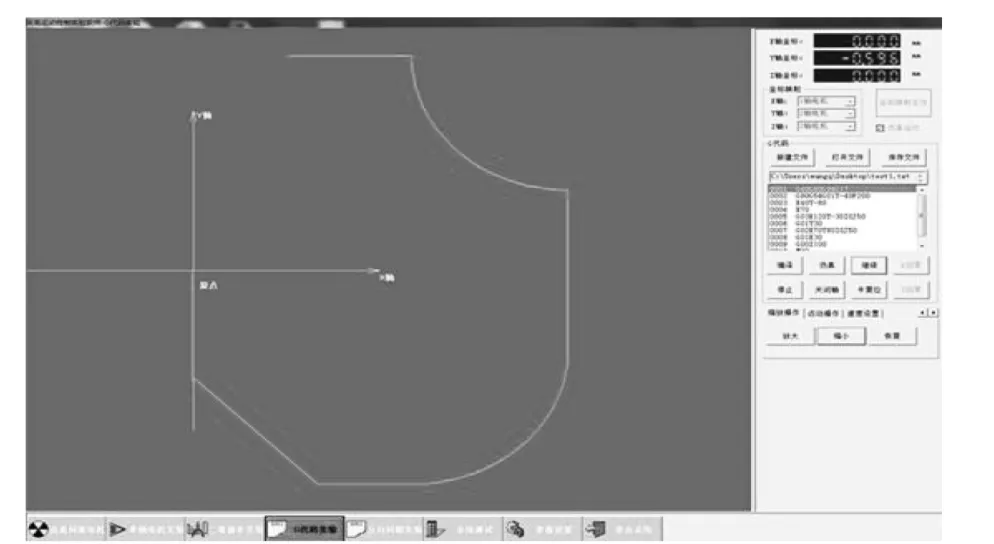
图6 G代码程序仿真及驱动界面
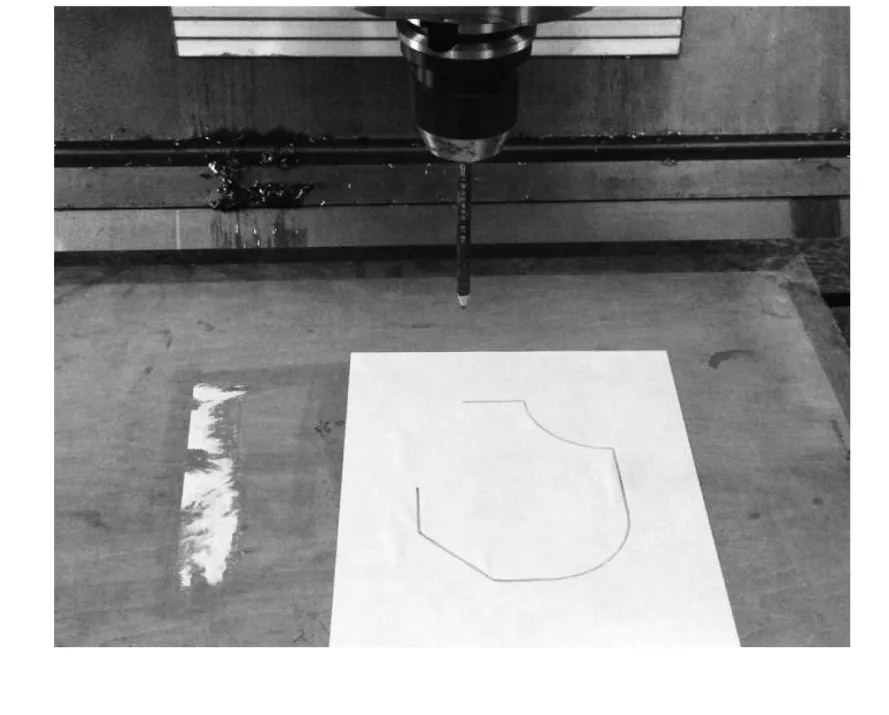
图7 G代码程序实际运行轨迹
5 小结
在原Leadway_v450数控加工中心的基础上开发了基于运动控制卡的开放式数控系统,并进行了试验研究,试验结果表明所组建的开放式数控系统功能和性能满足设计要求,这种开放式数控系统具有开发周期短、开发成本低、灵活性强、控制精度高等优点,具有很强的现实意义。同时由于运动控制卡的功能十分强大,许多功能还没有开发利用,所以此开放式数控系统还具有较大的开发空间。
作者简介:王谦,男,宿州职业技术学院助教,硕士研究生。
中图分类号:TH-39
【文献标识码】A
文章编号:1009-8534(2016)02-154-03
猜你喜欢
制造技术与机床(2019年11期)2019-12-04
制造技术与机床(2018年12期)2018-12-23
浙江工业大学学报(2017年5期)2018-01-22
制造技术与机床(2017年5期)2018-01-19
制造技术与机床(2017年6期)2018-01-19
制造技术与机床(2017年7期)2018-01-19
制造技术与机床(2017年9期)2017-11-27
制造技术与机床(2017年9期)2017-11-27
制造技术与机床(2017年8期)2017-11-27
制造技术与机床(2015年10期)2015-04-09
