
活鱼近距离转运称重计量系统设计及应用
2019-07-11 09:39王志勇冯书庆谌志新汤涛林
渔业现代化 2019年3期
王志勇,冯书庆,谌志新,汤涛林
(1 中国水产科学研究院渔业机械仪器研究所,上海 200092;2 农业农村部远洋渔船与装备重点实验室,上海 200092)
随着经济社会的发展,人们对鲜活水产品的需求与日俱增,从生产场所到水产品加工场所对水产品的鲜度、品质要求越来越高。目前,中国国内95%的淡水鱼以鲜活方式流通,销往全国各地。淡水活鱼在生产流通过程中的生产成本、流通效率、流通成本以及质量和安全成为影响淡水活鱼流通的重要因素。淡水活鱼流通主要由活鱼养殖、运输、暂养、装卸、分销环节组成[1-4]。目前,国内大中型水库或湖泊捕鱼后,从捕获场所将产品移送至岸上基本是通过船载,从船上将产品称至其他运输工具基本是使用传统的抄网或塑料筐等,人工称重后装入活鱼车。不仅劳动强度大、生产效率低,还容易导致鱼体损伤或死亡[5-6]。因此,如何利用机械化作业,降低劳动强度,提高工作效率,实现渔业生产安全、高效,成为亟须解决的问题。国内外先后针对池塘或网箱养殖研发了机械化活鱼起捕设备,作业方式通过皮带式或链斗式提升装置将活鱼输送到活鱼运输车,或者通过吸鱼泵抽吸起捕,一般与卡车配套使用,构成活动式起捕装置[7-11]。针对需要转运的活鱼规格较大(平均体质量10 kg以上),用于起捕活鱼的真空吸鱼泵主要依靠国外进口,价格比较昂贵。基于此,研制了有别于上述装备的一种斗式机械化提升和滑槽输送装置,实现活鱼机械化装卸、自动称重计量系统,降低工人劳动强度、提高工作效率。
1 总体结构设计及工作原理
活鱼近距离转运称重计量系统(以下简称“转运系统”)主要功能有机械化转运、过程自动称重计量。总体结构由滑槽输送装置、鱼斗提升和翻倒装置及鱼体称重计数装置组成。主要部件包括2个进鱼滑槽、2套提升设备、1套自动称重计量和统计系统和1个主滑槽(图1)。
工作原理:利用抄网将活鱼放入进鱼滑槽,进鱼滑槽底端开有漏鱼孔,在水流作用下,鱼下滑到中间漏鱼孔,经转接槽进入到提升鱼斗中,在鱼斗装鱼过程中,鱼斗随护栏保持于水中,确保鱼不离水。鱼斗和升降框沿主架导轨上下移动,当卷扬机提升到一定高度后,气缸控制鱼斗翻转,鱼进入主滑槽内。在主滑槽前端底部安装有称重计量装置,通过滑槽吊臂将活鱼送至运输车[12-18]。
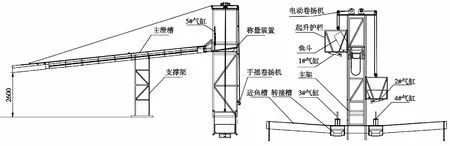
图1 活鱼近距离转运称重计量系统总体结构
技术参数:主架长L=1.5 m,宽B=1.0 m,高H=6.5 m,进鱼滑槽≥13 m;单鱼斗最大起鱼量300 kg;空压机排气量250 L/min,排气压力≤1.6 MPa;卷扬机提升速度 15 m/min,最大起重量500 kg;储气罐容积1.5 m3,工作压力0.8 MPa;平台高度差Δh=(400±200) mm,传送距离Δl≤13.5 m。
2 控制系统设计
称重计量系统的控制部分选用Siemens S7-200型PLC。自动、手动两种控制模式可以满足不同工况需要。PLC作为系统的核心控制器件,集成开、停机控制、运行流程控制、电源装置状态量的采集、位置信号采集、设置和显示参数、逻辑计算、与电子称重计量装置通信等功能。上位机采用研华I5 4G工控机,除了具备抗冲击、防尘、防辐射等特点外还提供丰富的IO扩展,上位机与PLC采用TCP/IP通信协议通过以太网接口进行通讯,上位机与电子台秤则通过二次仪表提供的RS232串口连接进行通讯。此外,上位机与打印设备则采用并口连接通讯。所有硬件执行机构和传感器部件全部通过连接PLC,最终与PC端软件实施交互通讯,从而完成活鱼的自动称重计量与输送控制。
2.1 硬件设计及分析
系统硬件控制主要包括电源总开关、水泵、空压机、提升卷扬机,系统控制原理如图2所示。系统硬件主要由PLC、变频器、光电传感器、限位开关、继电器等组成,输入部分由伸缩气缸、限位开关组成;输出部分由起升电机、翻倒鱼斗、上/下闸门等组成,完成活鱼提升、翻倒及选择,输入输出端子功能如表1所示。
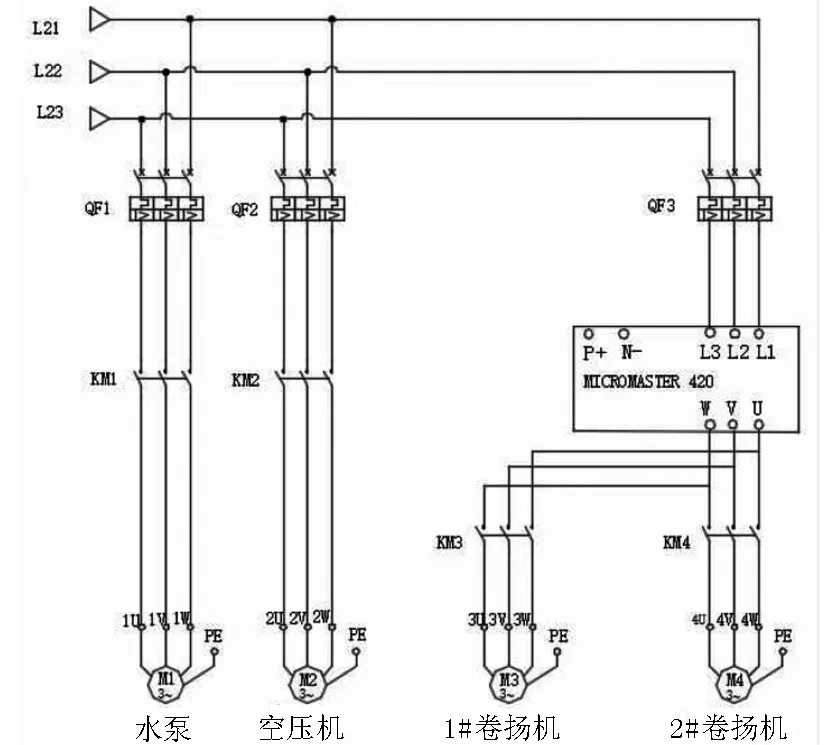
图2 系统电气控制原理图
系统控制流程如下:开机后进行空载试验,确认卷扬机、行程开关正常,并在静止状态下将电子台秤归零。测试急停开关,无异常再向下进行,否则立即停止。转运前,调节主滑槽的倾斜度以适应运输车辆的高度差,选择3号或4号气缸工作保持下闸门开启状态,开启前确认闸门对应的提升斗已就位。提升斗内装满合适重量活鱼后,开启1号或2号卷扬机进行提升,同时关闭3号或4号气缸,主架上设有行程开关,升降框和鱼斗提升到指定位置会自动停止。鱼斗提升到指定位置后PLC控制1号或2号气缸进行翻倒作业,翻倒活鱼之前保持5号气缸处于上闸关闭状态,以方便静止后活鱼称重计量。为保证称重计量精度,在计算机确认重量读数前,暂停提升架关联的一切操作。称重完成后,开启5号气缸提升闸门,水阀辅助冲水,同时将升降框及鱼斗下降复位,活鱼从主滑槽上部滑下,进入岸上的活鱼运输车上盛鱼装置,主滑槽末端采用可伸缩设计,方便调节主滑槽到运输车距离。

表1 输入输出地址功能表
2.2 软件系统设计
软件系统分为PLC端和上位机端,PLC端基于西门子S7-200梯形图程序,主要完成硬件时序逻辑控制、开关自锁互锁控制等,包括冲水阀门开关、鱼斗倾倒气缸开关、鱼斗升降开关等电子器件的直接操控,系统控制流程如图3所示。上位机操作界面设计基于LabVIEW平台编写,该平台能与整个硬件系统无缝连接。系统软件设计主要完成对PLC控制器的操作及参数设置、系统监控、与电子台秤通讯控制、数据库存储操作、报表输出打印等功能。软件使用Windows XP,Windows7操作系统;数据库管理系统选用Access 2010。Windows操作系统集成了各种向导和生成器工具,支持本地数据库或远程数据库的连接。数据库主要对输送的活鱼数量、活鱼质量等数据作日常记录和储存[19-21]。
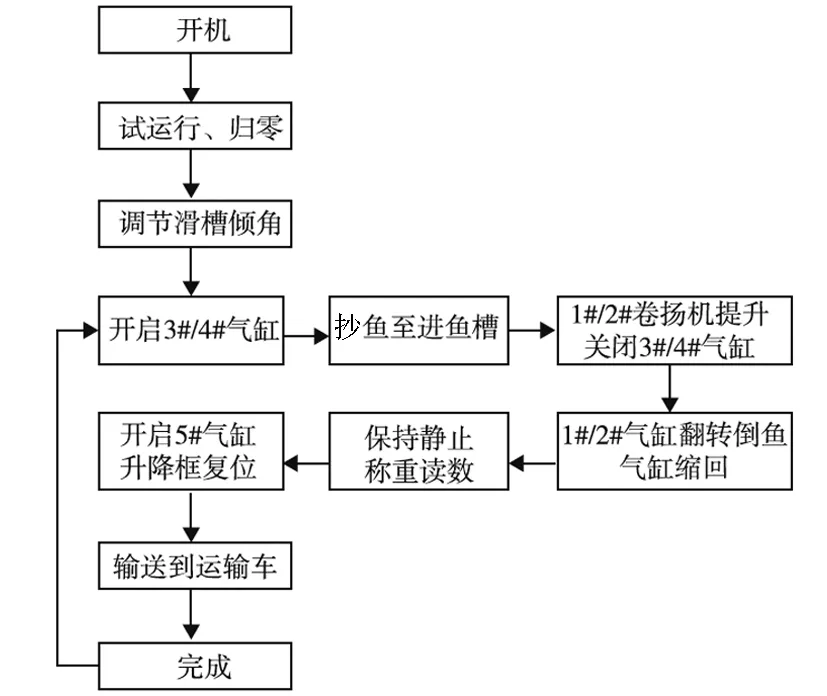
图3 系统控制流程
3 系统应用
该活鱼近距离转运称重计量系统在千岛湖淳鱼养殖基地安装使用,根据岸上活鱼车位置高度,主滑槽出鱼口离趸船甲板高度设计为2.6 m,出口高度可以通过手动卷扬机适当调整,主滑槽入鱼口离甲板高度4.0 m,使主滑槽斜度能够保证活鱼平缓下滑,减小冲击。卷扬机通过动滑轮提升鱼斗,由于起升距离较短,为减少鱼类跳动,鱼斗提升选用慢速卷扬机(额定速度小于20 m/min),起升过程中护栏沿导轨上下滑动,运行平稳,噪音小,工作安全可靠,可以在控制室自动化操作。提升卷扬机带有自动刹车,能在上升和下降过程中的不同位置安全实现自锁。鱼斗翻倒采用气缸控制,翻倒平稳。系统称重误差率小于0.5%,日均转运量12 t,提高了活鱼近距离转运效率。另外,在活鱼近距离转运称重计量过程中,只有在活鱼提升和称重过程中会短时离开水,由于时间很短,对活鱼影响很小。
在该系统使用之前,活鱼由湖边暂养网箱运到岸上运输车,转运工作全部由人力完成,仅岸基抬鱼工作就需要6组12个人工连续工作6 h完成,效率很低、工作量大、人力成本非常高,采用该装置后,人力投入减少约70%,提高了活鱼转运流通效率[22-25]。
4 结论
活鱼近距离转运称重计量系统主要针对靠岸网箱或船载活鱼转运到岸基或码头运输车,转运过程需时较短,转运过程中无需供氧装置。转运输送过程鱼道采用不锈钢滑槽及带水滑行,鱼体鲜活无损。系统采用PLC实现自动化控制,电子仪器自动称重计量和统计,提高了机械设备的控制精度及可靠性,提高了工作时效,减少了人为统计疏失。整个转运过程机械化操作,改变了传统渔业生产作业模式。但也存在一些不足之处,如当湖中水位过低时,需要移位趸船来适应岸上活鱼车位置,后续将在现有称重计量系统设计基础上进行优化升级,将活鱼提升架以及主滑槽设计成可升降式结构,消除趸船受水位变化的影响,进一步提升该系统的适用性和高效性。另外,活鱼称重计量过程可以考虑采用模糊视觉识别技术,在称重计量系统数据库中增添鱼体条数自动计量功能,解决进、出鱼数量登记的问题,进一步丰富数据库内容,并为今后开展鱼体轮廓、重量视觉识别技术研究提供基础数据。
□
猜你喜欢
科技与创新(2021年15期)2021-11-28
商情(2020年31期)2020-07-23
汽车维护与修理(2019年1期)2019-07-09
模具制造(2019年4期)2019-06-24
发明与创新·中学生(2018年8期)2018-09-08
爱你·心灵读本(2018年2期)2018-08-04
爱你(2018年4期)2018-03-01
科技创新导报(2016年9期)2016-05-14
无线互联科技(2016年24期)2016-02-06
汽车与新动力(2014年4期)2014-02-27
